 |
Главная |


Результаты программирования
|
из
5.00
|
Описание разрабатываемой конструкции.
На основе проведённого анализа техники ходьбы, анализа существующих конструкций была выбрана четырёхногая компоновка робота, т.к. такая компоновка робота более компактная, чем шесть ног, и намного проще чем с двумя ногами. Схема разработанного робота представлена ниже на рисунках 10-11.

Рис.10. Схема робота вид сверху
Робот состоит из корпуса 5, на котором закреплены приводы 3, на выходном валу привода расположена втулка 1 , на которой закреплена с натягом лапа 2. Питание робота осуществляется с помощью аккумулятора 4, длины L1 и L2 выбраны разными для того, чтобы лапы робота могли бы двигаться асинхронно, не мешая друг другу.[1]
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |

Рис. 13. Внешний вид разрабатываемого робота
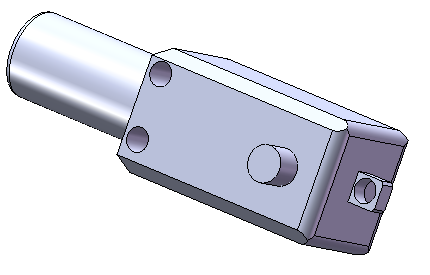
Рис. 14. Внешний вид электродвигателя
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |

Рис. 16. Внешний вид аккумулятора

Рис. 17. Внешний вид платы управления

Рис. 18. Внешний вид силового модуля
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |

Рис.19. Инкрементальный энкодер на подставке


Рис.20. Внешний вид подшипника
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |
Кинематика шагающего робота.
Одним из наиболее важных этапов в проектировании мехатронной системы является разработка ее математической модели и реализация численного моделирования, позволяющего исследовать основные характеристики устройства и особенности его движения.
Целью моделирования является:
1. В соответствии с математической моделью робота и
алгоритмом его движения в среде MathCAD написать программу, моделирующую движение устройства.
2. Построить графики характеристик объекта:  (t),
(t),  (t),
(t),  (t),
(t),  (t),
(t),  (t),
(t),  (t).
(t).
3. Сделать выводы о зависимости изменения скорости движения робота от длины лапы робота и её угловой скорости.
На рис. 1 представлена расчетная схема для моделирования движения робота. Корпус робота перемещается по горизонтальной поверхности в неподвижной системе координат Оxy.

Рис. 25. Расчётная схема
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
; 
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
; 
Моделирование в среде MathCAD.
Алгоритм численного расчета

Рис. 26. Алгоритм моделирования походки робота.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |
k - Расстояние от оси вращения лапы робота до края корпуса робота.
a - Расстояние от оси вращения до центра робота.
b - Расстояние от оси вращения лапы робота до нижнего края.
Динамические данные:
L - Длина лапы робота.
 - Угловая скорость лапы робота.
- Угловая скорость лапы робота.
Листинг программы

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |




| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |

Результаты программирования.
|
из
5.00
|
Обсуждение в статье: Результаты программирования |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы