 |
Главная |


Незатухающие колебания чувствительного элемента
|
из
5.00
|
Во второй главе показано, что вектор  горизонтальной составляющей угловой скорости вращения Земли может быть использован для получения навигационной информации.
горизонтальной составляющей угловой скорости вращения Земли может быть использован для получения навигационной информации.
Во-первых, данный вектор горизонтален, находится в плоскости меридиана и является касательным к нему. Очевидно, что определение направления этого вектора дает возможность найти плоскость меридиана. Данную задачу и решают гирокомпасы.
Во-вторых, измерение модуля вектора ω1 позволяет определить широту места. Такое определение выполняют некоторые типы инерциальных навигационных систем. В них измеряется величина ω1 = Ω1 (Ω1 - приборное или измеренное значение горизонтальной составляющей угловой скорости вращения Земли). Отсюда Ω1 = ω  ♀ cos φ. Полная величина угловой скорости вращения Земли известна, тогда φ = arccos Ω1/ ω♀.
♀ cos φ. Полная величина угловой скорости вращения Земли известна, тогда φ = arccos Ω1/ ω♀.
Рассмотрим более подробно принцип работы гирокомпасов с непосредственным управлением.
Смещение центра тяжести чувствительного элемента гирокомпаса относительно центра подвеса - это первое условие превращения свободного гироскопа в гирокомпас. В параграфе 2.4.3 рассмотрено движение такого гироскопа на Земле. Для более подробного анализа реализации этого условия необходимо составить уравнения движения чувствительного элемента в горизонтной системе координат. Для этого воспользуемся уравнениями движения свободного гироскопа (2.1). Поскольку главная ось чувствительного элемента гирокомпаса всегда близка к плоскостям горизонта и меридиана, то углы α и β малы. Тогда tg β ≈ О, sin α ≈ α. Теперь уравнения примут вид
 ; (3.3)
; (3.3)
Как рассматривалось в параграфе 2.4.3, вследствие вращения Земли гироскоп в горизонтной системе координат видимым образом движется в азимуте с угловой скоростью  , а по высоте - с угловой скоростью
, а по высоте - с угловой скоростью  . С появлением угла β, то есть с отклонением центра тяжести от вертикальной линии, проходящей через центр подвеса чувствительного элемента, появляется плечо (рис. 3.3)
. С появлением угла β, то есть с отклонением центра тяжести от вертикальной линии, проходящей через центр подвеса чувствительного элемента, появляется плечо (рис. 3.3)
DG = a sin β ≈ а β .
С появлением плеча возникает момент силы тяжести Ly = В β (см.(2.12)), называемый маятниковым моментом. Последнее обстоятельство приводит к прецессии гироскопа к западу:
ωpz =- 
Так как угол β мал, cos β ≈ 1, то проекция полученной угловой скорости на вертикаль равна ωpz.
 |
Рис. 3.3.
Угловая скорость прецессии в азимуте войдет в первое уравнение системы (3.3)
На движение гироскопа по высоте никакого дополнительного влияния не возникло. Окончательно уравнения примут вид
 ,
,
или
 (3.4)
(3.4)
Получены дифференциальные уравнения движения чувствительного элемента в горизонтной системе координат. Они с достаточной степенью точности характеризуют это движение как в азимуте, так и по высоте.
Такой же результат дает способ Кудревича, рассмотренный в параграфе 2.2. Просуммировав гироскопические моменты Н , Hω2 и момент силы тяжести, приложенные по оси у, получим первое уравнение, а сумма гироскопических моментов по оси z дает второе уравнение системы (3.4). Малые члены уравнений исключены из рассмотрения заранее для упрощения преобразований.
Уравнения описывают незатухающие колебания гирокомпаса, характер и физический смысл которых изложен в параграфе 2.4.3.
Незатухающие колебания совершаются у положения равновесия, которое займет ось х чувствительного элемента, когда прекратится движение, то есть при = 0 и = 0. Подставив эти значения в уравнения (3.4), получим их частные решения:
 (3.5)
(3.5)
Данные уравнения характеризуют положение равновесия главной оси гирокомпаса.
Анализ уравнений:
1. Главная ось гироскопа находится в плоскости меридиана. Она приподнята над плоскостью горизонта на угол βr, что приводит к появлению момента Вβr. Наличие этого момента обеспечивает прецессию оси х гирокомпаса вслед за уходящим к западу меридианом:
ωpz =- 
2. Угол βr зависит от широты.
Для нахождения общего решения уравнений движения (3.4) необходимо разделить переменные. Продифференцируем первое уравнение:

Из второго уравнения подставим значение и после преобразования получим
 (3.6)
(3.6)
где
 (3.7)
(3.7)
здесь ω0 - круговая частота незатухающих колебаний. Причем ω0 =В/Н и ω0 = ω♀ cos φ. Отсюда найдем период незатухающих колебаний как величину, обратно пропорциональную_частоте:
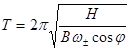 (3.8)
(3.8)
Из анализа уравнений следует:
1. Период незатухающих колебаний зависит от широты. На экваторе он минимален, на полюсе - стремится к бесконечности, что происходит вследствие потери гирокомпасом избирательности к меридиану.
2. Период Т зависит от параметров гирокомпас Н и В. Это дает возможность его регулировать.
Гирокомпас представляет собой автоматическую систему. Для ее оценки с точки зрения основ автоматики произведем линейное преобразование уравнения (3.6), считая = λ. Следовательно,
λ 2 + ω02 = 0 (3.9)
Выражение (3.9) является характеристическим уравнением и имеет мнимые корни
λ 1,2 = ±i ω0 ,
где i =  .
.
В соответствии с критериями устойчивости Гурвица система неустойчива, если корни характеристического уравнения мнимые. Переходный процесс имеет гармонический характер. Следовательно, гирокомпас совершает гармонические незатухающие колебания.
Общее решение уравнения (3.6) имеет вид
α = C1cos ω0 t+ C2sin ω0 t (3.10)
где С1 и C2- постоянные интегрирования.
Для начальных условий (t = 0) последний член уравнения равен нулю, а угол отклонения в азимуте максимален и равен α0, то есть С1= α0. Тогда
α = α0 cos ω0 t (3.11)
Из анализа уравнения (3.11) можно заключить, что гирокомпас совершает незатухающие колебания с амплитудой, равной начальному отклонению главной оси чувствительного элемента от плоскости истинного меридиана. Величиной C2 пренебрегаем ввиду ее незначительности.
Для нахождения закона движения главной оси гироскопа по высоте продифференцируем уравнение (3.11):
= -α0 ω0sin ω0 t.
Подставив это значение в первое уравнение системы (3.4), получим

Для упрощения данного выражения произведем замену

Здесь все составляющие постоянны. Последний член уравнения равен βr (см.(3.5)). После замены выражение примет вид

Уравнение (3.11) можно представить в виде

Воспользовавшись теоремой Пифагора, найдем текущее значение конца вектора  чувствительного элемента для любого момента времени (рис. 3.3)
чувствительного элемента для любого момента времени (рис. 3.3)
 (3.12)
(3.12)
Это выражение является уравнением эллипса с центром αr = 0, β = βr и с полуосями: большой α0, малой β0. Это и есть траектория движения главной оси гироскопа. Анализ этого движения описан в параграфе 2.4.3.
Итак: выполнено первое условие превращения свободного гироскопа в гирокомпас. Хотя таким прибором пользоваться еще нельзя, так как он совершает незатухающие колебания, но эти колебания происходят вокруг известного направления - истинного меридиана, а говоря строже - направления вектора горизонтальной составляющей угловой скорости вращения Земли.
Последнее уточнение рассмотрим подробнее. Маятниковый момент создается благодаря смещению центра тяжести гироскопа относительно центра подвеса, а также вследствие вращения Земли. В положении равновесия центр тяжести чувствительного элемента вращается в инерциальном пространстве вокруг вектора ω1, совершая один оборот в сутки. Именно к его направлению и приходит главная ось чувствительного элемента. В свою очередь этот вектор находится в плоскости истинного меридиана. Следовательно, в частном случае, а именно - при неподвижном основании, когда гирокомпас участвует только в одном вращении - вращении Земли, он приходит в плоскость истинного меридиана.
Обратимся ко второму уравнению системы (3.4). Домножим все его члены на величину Н. С учетом вышесказанного второй член этого уравнения является моментом
Rz = Hω♀+ cos φ α, (3.13)
который характеризует реакцию гироскопа с пониженным центром тяжести на его отклонение в азимуте от направления вектора ω1 (то есть от плоскости истинного меридиана). Данный момент является гироскопическим моментом и возникает при движении гироскопа по высоте (рис.3.3). Движение по высоте вследствие вращения Земли происходит только в случае, когда α ≠ 0. Таким образом, Rz является направляющим моментом гирокомпаса. Анализ уравнения (3.13) позволяет сделать следующие выводы:
1. Направляющий момент может возникать только при вращении Земли. Это обязательное условие превращения свободного гироскопа в гирокомпас. На любой планете, не имеющей вращения, чувствительный элемент занимал бы неопределенное положение (ω♀ = 0, Rz = 0).
2. Гирокомпас занимает также неопределенное положение и на полюсе (cos 90° = 0, Rz: = 0), вследствие потери направляющего момента. Фактически гирокомпас теряет избирательность к меридиану в широтах выше 75  85°, когда Rz становится малым и соизмеримым с вредными моментами. Гирокомпасы, установленные на подводной лодке "Ленинский комсомолец", совершившей плавание на северный полюс в 1962 г., по техническим условиям должны были работать до широты 85°. Фактически они потеряли чувствительность к меридиану в широте 86,5°. Это отмечено в воспоминаниях бывшего командира этой лодки Жильцова. Для гирокомпаса "Курс-4" и его модификаций предельная рабочая широта составляет 75°.
85°, когда Rz становится малым и соизмеримым с вредными моментами. Гирокомпасы, установленные на подводной лодке "Ленинский комсомолец", совершившей плавание на северный полюс в 1962 г., по техническим условиям должны были работать до широты 85°. Фактически они потеряли чувствительность к меридиану в широте 86,5°. Это отмечено в воспоминаниях бывшего командира этой лодки Жильцова. Для гирокомпаса "Курс-4" и его модификаций предельная рабочая широта составляет 75°.
3. Направляющий момент обращается в ноль, когда гирокомпас в меридиане (α = 0, Rz = 0).
Итак, для превращения свободного гироскопа в гирокомпас в условиях вращающейся Земли нужно "связать" с нею гироскоп. Связь гироскопа с Землей осуществляется реализацией конструктивных решений. Для гирокомпаса "Курс-4" таким решением является снижение центра тяжести чувствительного элемента относительно центра подвеса. Это приводит к возникновению незатухающих колебаний, теоретический анализ которых приведен в настоящем параграфе, а графический - в параграфе 2.4.3.
Однако такой прибор еще не является гирокомпасом. Необходимо превратить его незатухающие колебания в затухающие. Для этой цели служит масляный успокоитель (жидкостный демпфер). Введение дополнительного устройства, масляного успокоителя, использующего в своей работе также силу тяжести, - это выполнение второго условия превращения свободного гироскопа в гирокомпас.
Билет № 8
Затухающие колебания
В любых автоматических системах гашение механических колебаний производится с помощью момента, сдвинутого от основного момента либо по фазе (по времени), либо в пространстве на 90°. В первом случае оба момента прикладываются по одной оси, во втором - по разным.
|
из
5.00
|
Обсуждение в статье: Незатухающие колебания чувствительного элемента |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы