 |
Главная |


Лабораторная работа № 1-5
|
из
5.00
|
ИЗУЧЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
ТВЕРДОГО ТЕЛА
2.Цель работы: экспериментальное изучение уравнения динамики вращательного движения твердого тела относительно неподвижной оси и ознакомление с динамическим методом определения момента инерции твердого тела.
3.Оборудование: лабораторные установки с маятником Обербека в двух модификациях( тип установки указывает преподаватель):
1. “Механический” маятник Обербека с грузами, штангенциркуль, секундомер, масштабная линейка, весы с разновесами.
2. “Автоматический” маятник Обербека с грузами (с автоматической регистрацией времени движения грузов и автоматической установкой маятника), штангенциркуль.
4. Теоретическое введение:
 Уравнение вращательного движения твердого тела относительно неподвижной оси имеет вид
Уравнение вращательного движения твердого тела относительно неподвижной оси имеет вид
Y e = M, (1)
где M - сумма проекций на ось вращения всех моментов внешних сил, действующих на тело; Y - момент инерции твердого тела относительно неподвижной оси вращения; e - угловое ускорение тела.
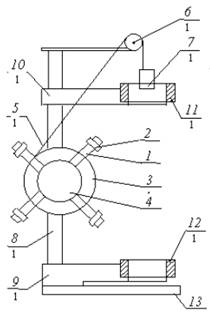
На рисунке приведена схема маятника Обербека, с помощью которого можно исследовать уравнение (1). Четыре спицы 1 соединены с втулкой резьбой под прямым углом, образуя крестовину. На спицах находятся цилиндрические грузы 2 массой m1 каждый. Передвигая эти грузы по спицам, можно изменить момент инерции крестовины, а так- же сбалансировать маятник. Втулка и два шкива 3, 4 радиусами r1 и r2 насажены на общую ось, которая закреплена в подшипниках так, что вся система может вращаться вокруг горизонтальной оси. К шкиву (3 или 4) прикреплена нить 5, которая перекинута через блок 6. К концу нити привязана легкая платформа 7 известной массы. На платформе размещаются грузы, которые натягивают нить и создают вращающий момент внешних сил M = T r , где T - сила натяжения нити; r - радиус шкива. Силу T можно найти из уравнения (в проекциях на вертикальную ось) движения платформы с грузом m g – T = m a, где a - ускорение груза, m - масса платформы с грузом, g - ускорение свободного падения. Выразив отсюда T и подставив в выражение для M , получим:
M = m (g – a) r. (2)
Так как нить практически нерастяжима, то ускорение a связано с угловым ускорением e соотношением e = a / r . Ускорение груза, высота его падения h и время падения t связаны формулой для равноускоренного движения h = a t2 / 2 . Выразив отсюда a и подставив его в формулу для e и (2), получим:
e = 2 h / r t2 = 4 h / D t2; (3)
M = m (g – 2 h / t2) D / 2, (4)
где D – диаметр шкива. По полученным значениям M и e, используя (1), можно вычислить момент инерции маятника.
При учете сил трения на оси маятника Обербека уравнение, описывающее вращательное движение, принимает вид:
Y e = M – Mтр, (5)
где Mтр – момент силы трения.
Описание установки
1. “Механический” маятник Обербека изготовлен в виде переносного настольного прибора, схема которого соответствует рисунку. Маятник закреплен в металлическом каркасе так, что оси шкива 3 и блок 6 расположены на одном уровне и нить 5 от шкива 3 до блока 6 идет горизонтально.
2. “Автоматический” маятник Обербека представляет собой переносной настольный прибор. С помощью двух кронштейнов: нижнего неподвижного 9 и верхнего подвижного 10 маятник закреплен на вертикальной колонке 8. Основание колонны снабжено регулируемыми ножками, обеспечивающими горизонтальную установку прибора. Наверху колонны закреплен подшипниковый узел блока 6. На неподвижной втулке (закрытой шкивом 4) прикреплен тормозной электромагнит, который после подключения к нему напряжения питания удерживает с помощью фиксированной муфты систему крестовины вместе с грузами в состоянии покоя. Подвижный кронштейн 10 можно перемещать вдоль колонны и фиксировать его в любом положении, определяя, таким образом, длину пути падения груза h. Для отсчета длины пути на колонне нанесена миллиметровая шкала. На подвижном кронштейне размещен фотоэлектрический датчик 11, который (после нажатия клавиши “Пуск”) запускает систему начала отсчета времени движения груза – схему работы миллисекундомера. На неподвижном кронштейне 9 закреплен фотоэлектрический датчик 12, вырабатывающий электроимпульс конца измерения времени движения груза и включающий тормозной электромагнит. К кронштейну 9 прикреплен кронштейн 13 с резиновым амортизатором, ограничивающим движение грузов. На основании прибора закреплен миллисекундомер, к гнездам которого подключены фотоэлектрические датчики 11, 12. На лицевой панели миллисекундомера расположены элементы управления: “СЕТЬ” – выключатель сети. Нажатие клавиши вызывает включение напряжения питания (при повторном нажатии – выключение) и автоматическое обнуление прибора (все индикаторы высвечивают цифру нуль, и светят лампочки фотоэлектрических датчиков). “СБРОС” – обнуление измерителя, при нажатии этой клавиши на табло секундомера будут высвечивать нули. “ПУСК” – управление электромагнитом. Нажатие клавиши вызывает освобождение электромагнита и генерирование импульса, разрешающего измерения.
5. Порядок выполнения работы
1. Маятник Обербека
1.1. С помощью регулируемых ножек прибора привести ось маятника в горизонтальное положение.
1.2 . Провести балансировку маятника.
Для этого на двух противоположных спицах крестовины оставьте по одному грузу m1 на выбранных расстояниях R от оси вращения. Закрепив винтом на спице один из грузов на расстоянии R и передвигая второй груз на противоположной спице, добейтесь равновесия маятника и закрепите винтом в этом положении второй груз. Затем таким же образом сбалансируйте грузы на второй паре спиц на таком же расстоянии от оси вращения, и если маятник сбалансирован, то он находится в безразличном равновесии. Внести R в протокол измерений.
1.3. Измерить диаметр шкива D и внести его в протокол измерений.
1.4. Намотать нить на шкив, поднимая платформу с грузом 7 (m) на определенную высоту h (например, до уровня стола, на котором стоит прибор). Отпустить платформу с грузом с этой высоты, запуская одновременно секундомер. После прохождения платформы расстояния h остановить секундомер и занести время движения груза t в таблицу измерений.
С одним и тем же грузом рекомендуется проводить не менее трех измерений времени падения груза. Для расчета M и e по формулам (3) и (4) берется среднее время движения данного груза.
1.5. Измерить M и e для 5 – 6 разных грузов, постепенно нагружая платформу.
1.6. Построить график зависимости e (M) и проанализировать его.
1.7. Провести аппроксимирующую прямую, используя метод наименьших квадратов. Определить момент инерции маятника Обербека и момент сил трения, действующих на оси, согласно уравнению (5).
2. На “автоматическом” маятнике Обербека
2.1. Проверить надежность заземления прибора.
2.2. С помощью регулирующих ножек основания привести колонну прибора в вертикальное положение.
2.3. Сдвинуть верхний подвижный кронштейн 10 по колонне прибора 8 на выбранную высоту h и так установить , чтобы грузы 7, падая, проходили через середину рабочего окна фотоэлектрических датчиков. Занести h в протокол измерений.
2.4. Сбалансировать маятник (см. п. 1.2). При балансировке нужно следить, чтобы при вращении маятника грузы на спицах или винты, крепящие эти грузы, не задевали за основание, на котором закреплен подшипниковый узел крестовины. По этой причине грузы на спицах нельзя сдвигать к оси вращения маятника ближе третьей (считая от оси вращения) риски на спицах.
2.5. Измерить диаметр шкива D (или получить его значение от преподавателя) и внести его в протокол измерений.
ВНИМАНИЕ! Шкивы пластмассовые, имеют тонкие ребра, между которыми двигается нить. Расстояние между ребрами такое, что в них губки штангенциркуля входят вплотную и при неосторожном измерении (при перекосе штангенциркуля) эти ребра можно сломать.
2.6. Включить сетевой шнур в сеть питания.
2.7. Нажать клавишу “СЕТЬ”, проверить, светятся ли лампочки индикаторов обоих фотоэлектрических датчиков; на табло миллисекундомера должны высвечиваться нули.
2.8. Нажать клавишу “ПУСК”. При этом освободится блокировка движения тормозных электромагнитов.
2.9. Вращая крестовину против часовой стрелки и наматывая нить, перекинутую через блок 6, на шкив 3 или 4, поднять платформу с грузом 7 в верхнее положение, установив дно платформы точно на уровне с чертой на корпусе верхнего фотоэлектрического датчика. Нажать клавишу “ПУСК” еще раз. В этом случае движение груза будет заблокировано тормозным электромагнитом, и груз должен находиться в состоянии покоя.
2.10. Нажать клавишу “ПУСК” повторно. Произойдет разблокировка движения тормозным электромагнитом, груз придет в движение и будет запущен секундомер, измеряющий время движения груза. При прохождении грузом окна нижнего фотоэлектрического датчика сработает механизм торможения груза и на табло секундомера зафиксируется время движения груза. Занести это время в таблицу измерений. С одним и тем же грузом рекомендуется проводить не менее трех измерений времени падения.
2.11. Нажать клавишу “СБРОС”. При этом произойдут сброс показаний секундомера (на табло секундомера будут высвечивать нули) и освобождение блокировки движения тормозным электромагнитом.
6. Экспериментальная часть
Таблица №1
| h | R | m | T | a | ε | M |

| 54,2 
| 8.4 | 0.028 | 0.93 | 0.015 | |

| 100.2
| 5.7 | 0.061 | 2.03 | 0.03 | |
|
| 146.2
| 4.5 | 0.098 | 3.26 | 0.04 | |

| 54,2
| 21.3 | 0.004 | 0.25 | 0.008 | |
|
| 100.2
| 11.5 | 0.015 | 0.93 | 0.015 | |

| 146.2
| 8.9 | 0.025 | 1.56 | 0.02 |
Расчет плотности материала в СИ:

7. Обработка результатов измерения

8. Вывод:
По результатам вычислений было установлено, что чем меньше момент инерции вращающегося тела и чем больше момент сил приложенных к нему, тем выше его угловое ускорение (при прочих неизменных условиях).
Вопросы к лабораторной работе:
1.Сформулируйте основной закон динамики вращательного движения.
Ответ: произведение момента инерции тела на его угловое ускорение равно суммарному моменту внешних сил, действующих на тело. Моменты сил и инерции берутся относительно оси, вокруг которой происходит вращение.
2.дайте определение момента силы, приложенной к телу и момента импульса вращающегося тела. Как направлены векторы этих величин по отношению к оси вращения тела?
Ответ: момент силы - векторная физическая величина, равная произведению радиус-вектора проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Моментом импульса вращающегося тела называют физическую величину, равную произведению момента инерции тела I на угловую скорость ω его вращения.
|
из
5.00
|
Обсуждение в статье: Лабораторная работа № 1-5 |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы