 |
Главная |


Исследование структуры плоского рычажного механизма
|
из
5.00
|
(первая задача)
1.1.1. Краткие сведения из теории
Проектирование новой машины всегда начинается с составления кинематической схемы ее механизмов.
Машина –устройство с механическим движением для преобразования энергии, материалов и информации, предназначенное для замены или облегчения физического или умственного труда человека. Машина всегда совершает полезную работу.
Механизм – система определенным образом взаимосвязанных элементов (звеньев), предназначенная для преобразования заданных движений одного или нескольких элементов в требуемое движение других элементов. Механизмы не совершают полезной работы, они предназначены только для осуществления требуемых законов движения их звеньев. К механизмам относятся, например, механические часы, пантограф, эллипсограф и др.
Машины и механизмы взаимно обратимы друг в друга, например, включенный, но не обрабатывающий деталь токарный станок, является механизмом, но как только на станке начнется обработка детали, он сразу станет машиной [1].
Механизмы состоят из звеньев, соединенных между собой подвижно.
Звено –это деталь или несколько неподвижно соединенных между собой деталей, движущихся как одно целое. На схемах звенья изображают упрощенно в виде линий или геометрических фигур (табл. 1.1). Подвижное соединение двух звеньев, обеспечивающее их относительное движение, называется кинематической парой. Кинематические пары во многом определяют работоспособность машины, так как через них передаются усилия от одного звена к другому; в этих же кинематических парах возникает трение, и они изнашиваются (табл. 1.2). Количество ведущих звеньев в механизме равно его степени подвижности W. Для определения степени подвижности любой кинематической цепи необходимо подсчитать число степеней свободы всех подвижных звеньев, полагая их не связанными между собой, затем следует вычесть число связей, наложенных на звенья кинематическими парами.
Т а б л и ц а 1.1
Условные изображения звеньев и кинематических пар

Таблица 1.2
Характеристика кинематических пар

Степень подвижности пространственной цепи определяется по формуле Сомова-Малышева:
 , (1.1)
, (1.1)
где 6n – число степеней свободы n звеньев без учета связей;
5р5, 4р4, 3р3, 2р2, 1р1 – число связей, наложенных на звенья парами пятого, четвертого, третьего, второго и первого классов соответственно.
Степень подвижности плоской цепи, состоящей из пар четвертого и пятого классов, определяется по формуле (1.1) без кинематических пар третьего, второго и первого классов, которая называется формулой Чебышева:
 , (1.2)
, (1.2)
где 3 – степень подвижности каждого звена на плоскости;
n – число подвижных звеньев;
2, 1 – количество условий связи, накладываемых кинематическими парами
р5 и р4 соответственно;
р5, р4 – количество кинематических пар пятого и четвертого классов.
Механизм состоит из одного или нескольких ведущих звеньев, стойки (неподвижного звена, опоры) и присоединенных к ним структурных групп.
Структурная группа (группа Ассура) – кинематическая цепь, которая при присоединении ее свободными элементами кинематических пар к стойкам имеет степень подвижности, равную нулю (W = 0), и которая не может быть расчленена на более простые кинематические цепи со степенью подвижности, равной нулю [3]. Виды некоторых групп Ассура приведены на рис. 1.1.
В группах Ассура могут быть сочетания чисел звеньев и кинематических пар пятого класса, приведенные в табл. 1.3.
Таблица 1.3
Сочетания чисел звеньев n и кинематических пар p5
| n | … | ||||
| p5 | … |
Во втором столбце табл. 1.3 (n = 2, p5 = 3) приведены сочетания групп Ассура второго класса различных видов (рис. 1.1, а), в третьем (n = 4, p5 = 6) –
третьего класса (рис. 1.1, б).
Класс группы Ассура выше третьего (четвертый, пятый) определяется числом внутренних кинематических пар, образующих так называемый наиболее сложный замкнутый контур (рис. 1.1, в, г).
Группы Ассура второго класса: п = 2; Р = 3; W = 0

Группы Ассура третьего класса: п = 4; Р = 6; W = 0

| Группы Ассура четвертого класса | Группы Ассура пятого класса: |
| п = 6; Р = 6; W = 0 | п = 6; Р = 9; W = 0 |

Рис. 1.1
Класс механизма определяется наивысшим классом группы Ассура, которая входит в его состав.
Для правильного определения класса механизма необходимо выполнить следующее:
рассчитать подвижность механизма W по формуле Чебышева (1.2);
отсоединить наиболее удаленную от ведущего звена группу Ассура второго класса и проверить подвижность оставшегося механизма. Если подвижность механизма изменилась или он распался, то отсоединение сделано неправильно, в этом случае следует отсоединять группу третьего класса;
отсоединение групп производить до тех пор, пока не останется одно ведущее звено со стойкой, причем каждый раз отсоединение следует начинать с группы Ассура второго класса;
на основании разложения механизма на группы Ассура написать формулу строения механизма в порядке присоединения их к ведущему звену и стойке:
[1] → [2, 3] → [4, 5, 6, 7] → [8, 9],
где в первых квадратных скобках указан номер ведущего звена, в последую-
щих – номера звеньев, входящих в группы Ассура соответствующих классов.
1.1.2. Пример решения первой задачи
1) Выбираем по своему варианту из прил. 1 схему механизма.
2) Вычерчиваем кинематическую схему механизма (рис. 1.2).
3) Определяем степень подвижности механизма по формуле:
 (1.3)
(1.3)
где 3 – степень подвижности каждого звена на плоскости;
n – общее количество звеньев (в том числе стойки или опоры);
р5, р4 – количество кинематических пар пятого и четвертого класса;
2, 1 – количество условий связи, накладываемое кинематическими парами р5 и р4 соответственно;
3* - степень подвижности стойки как самостоятельного звена на плоскости.
Для механизма, схема которого приведена на рис. 1.2, получаем:

Так как W = 1, механизм имеет в своем составе одно ведущее звено. Этим звеном может быть любое из звеньев 1, 3, 6, 7 или звено 9, соединенное со стойкой. В первом случае принимаем за ведущее звено 1 - кривошип, во втором случае – звено 9 - ползун.

Рис. 1.2
4) Определяем класс механизма при ведущем звене 1:
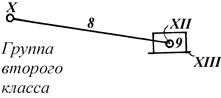 Рис. 1.3
Рис. 1.3
| а) отсоединяем от ведущего звена самую удаленную группу Ассура второго класса, состоящую из звеньев 9 и 8 с кинематическими парами Х, XII, XIII, и проверяем степень подвижности оставшегося механизма (рис. 1.3), |
(она не должна измениться в случае правильного отсоединения группы Ассура):


б) отсоединяем от ведущего звена самую удаленную группу Ассура второго класса. Такая группа может состоять из звеньев 7 и 5 с кинематическими
парами VII, VIII, XI (рис. 1.4). При отсоединении этой группы Ассура механизм распался: звенья 4 и 6 не соединяются с другими звеньями. Значит, отсоединение выполнено неверно, и следует отсоединить группу более высокого класса. В рассматриваемом случае это будет группа третьего класса, состоящая из звеньев 7, 5, 6, 4 с кинематическими парами IV, VI, VIII, VII, IX, XI (рис. 1.5).
После отсоединения группы третьего класса проверяем степень подвижности оставшегося механизма:

 Отсоединение выполнено верно;
в) отсоединяем от оставшегося механизма группу Ассура второго класса - звенья 2 и 3 с кинематичес- кими парами II, III, V (рис. 1.6). Проверяем степень подвижности оставшегося механизма (ведущее звено 1 с кинематической парой I):
Отсоединение выполнено верно;
в) отсоединяем от оставшегося механизма группу Ассура второго класса - звенья 2 и 3 с кинематичес- кими парами II, III, V (рис. 1.6). Проверяем степень подвижности оставшегося механизма (ведущее звено 1 с кинематической парой I):
|  Рис. 1.4
Рис. 1.4
 Рис. 1.5
Рис. 1.5
|
 Отсоединение выполнено верно;
г) составляем структурную формулу образования механизма в порядке присоединения групп Ассура к ве- дущему звену и стойке:
Отсоединение выполнено верно;
г) составляем структурную формулу образования механизма в порядке присоединения групп Ассура к ве- дущему звену и стойке:
|  Рис. 1.6
Рис. 1.6
|
[1]®[2; 3]®[4; 5; 6; 7]®[8; 9].
Полученный механизм состоит из ведущего звена, стойки, двух групп Ассура второго класса и одной группы третьего класса. Так как класс механизма определяется наивысшим классом входящих в него групп, то делаем вывод о том, что данный механизм является механизмом третьего класса.
5) Определяем класс механизма при ведущем звене 9:
а) отсоединяем от ведущего звена самую удаленную группу Ассура второго класса, состоящую из звеньев 1 и 2 с кинематическими парами I, II, III
(рис. 1.7), и проверяем степень подвижности оставшегося механизма (она не должна измениться):


Отсоединение выполнено верно;
б) отсоединяем от ведущего звена группу второго класса, состоящую из звеньев 3 и 4 с кинематическими парами IV, V, VI (рис. 1.8), и проверяем степень подвижности оставшегося механизма:


Отсоединение выполнено верно;
 Рис. 1.7
Рис. 1.7
| в) отсоединяем от ведущего звена группу Ассура второго класса, состоящую из звеньев 5 и 6 с кинематическими парами VII, VIII, IX (рис. 1.9), и проверяем степень подвижности оставшегося механизма:

| ||
 Рис. 1.8
Рис. 1.8
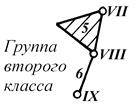 Рис. 1.9
Рис. 1.9
|  Отсоединение выполнено верно;
г) отсоединяем от ведущего звена последнюю группу, состоящую из звеньев 7 и 8 с кинематическими парами X, XI, XII (рис. 1.10), и проверяем степень подвиж-ности оставшегося ведущего звена:
Отсоединение выполнено верно;
г) отсоединяем от ведущего звена последнюю группу, состоящую из звеньев 7 и 8 с кинематическими парами X, XI, XII (рис. 1.10), и проверяем степень подвиж-ности оставшегося ведущего звена:

 Отсоединение выполнено верно;
д) составляем структурную формулу для данного механизма при ведущем ползуне 9:
[9]®[8; 7]®[6; 5]®[4; 3]®[2; 1].
Отсоединение выполнено верно;
д) составляем структурную формулу для данного механизма при ведущем ползуне 9:
[9]®[8; 7]®[6; 5]®[4; 3]®[2; 1].
| ||
| Данный механизм состоит из четырех групп Ассура второго класса, ведущего звена и стойки, значит, он является механизмом второго класса. Вывод: класс механизма зависит и от назначения ведущего звена. |  Рис. 1.10
Рис. 1.10
| ||
1.1.3. Вопросы для самопроверки
1) Что называется звеном, кинематической парой, кинематической цепью?
2) По каким признакам классифицируют кинематические пары?
3) Что такое структурная группа?
4) Как определяется класс механизма?
5) Написать и объяснить структурные формулы для определения степеней подвижности пространственного и плоского механизмов.
|
из
5.00
|
Обсуждение в статье: Исследование структуры плоского рычажного механизма |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы