 |
Главная |


Особенности построения моделей технологических объектов управления
|
из
5.00
|
Сложность идентификации технологических процессов во многом зависит от наличия априорной информации о технологических объектах управления, их статических и динамических характеристик. Определение характеристик объекта управления выполняется различными способами, например, могут быть рассмотрены методы, связанные с проведением физичес  кого эксперимента над ТОУ, в результате которого будет получен массив экспериментальных данных [ui , yi], где ui – входные переменные, yi – выходные переменные ТОУ, i – номер опыта. На основе массива экспериментальных данных [ui , yi] в дальнейшем строится аналитическая модель посредством полиномиальной аппроксимации (например, с использованием метода наименьших квадратов или сплайнов).
кого эксперимента над ТОУ, в результате которого будет получен массив экспериментальных данных [ui , yi], где ui – входные переменные, yi – выходные переменные ТОУ, i – номер опыта. На основе массива экспериментальных данных [ui , yi] в дальнейшем строится аналитическая модель посредством полиномиальной аппроксимации (например, с использованием метода наименьших квадратов или сплайнов).
В самом общем случае, связь между входным и «теоретическим» выходным сигналами может быть задана в виде некоторого оператора Ψ. При этом наблюдаемый выходной сигнал объекта может быть описан на основе соотношения:
y ( t ) = Ψ[u ( t )] + e ( t ).
Принцип суперпозиции позволяет объединить все действующие помехи в одну общую e ( t ) и приложить ее к выходу линейной модели. При рассмотрении задач идентификации все помехи считают статически независимыми, что позволяет моделировать их в виде гауссовского процесса (шума).
Перед началом экспериментальных исследований проводят априорный анализ перечня входных переменных с целью отбора и включения в состав модели информативных параметров, т. е. оказывающих наиболее сильное воздействие на выходные переменные y ( t ). В первую очередь в их состав включают управляющие входные переменные, с помощью которых осуществляется регулирующее воздействие на ТОУ.
Если в процессе идентификации структура модели не меняется, то выполняется только оценивание параметров модели (идентификация в узком смысле). Однако можно менять и структуру модели, подбирая наиболее адекватную описываемому процессу. При этом вид модели, ее структура выводится из физических представлений о сути процессов в ТОУ. Например, простейший сглаживающий фильтр (RC-цепь) описывается известными законами электротехники, для него можно записать:
u(t) = RCdy(t)/dt + y(t),
где Uin(t) = u(t), Uout(t) = y(t).
Если такая структура (с точностью до вектора коэффициентов β) известна, то при известном входном сигнале u ( t ) описание объекта можно представить в виде:
y ( t ) = F ( β , t ) + e ( t ),
где F – функция известного вида, зависящая от β и времени t .
Последнее уравнение позволяет после проведения эксперимента, заключающегося в фиксации входного и выходного сигналов на каком-то интервале времени, провести обработку экспериментальных данных и каким-либо методом (например, методом наименьших квадратов) найти оценку вектора параметров β. Отметим, что при экспериментальном определении параметров модели необходимо обеспечить:
● подбор адекватной структуры модели;
● выбор такого входного сигнала, чтобы по результатам эксперимента можно было найти оценки всех параметров модели.
Наиболее просто задача определения параметров решается для линейных объектов, для которых выполняется принцип суперпозиции. В задачах идентификации под линейными объектами чаще понимаются объекты, линейные по входному воздействию.
Как правило, идентификация – многоэтапная процедура, состоящая из этапов:
1. Структурная идентификация, включающая определение структуры математической модели на основании теоретических соображений.
2. Параметрическая идентификация включает в себя процедуру оценивания параметров модели по экспериментальным данным.
3. Проверка адекватности – проверка качества модели в смысле выбранного критерия близости выходов модели и объекта.
Следует отметить, что в связи с многообразием объектов и различных подходов к их моделированию существует множество вариантов решения задачи идентификации.
 2. 2. Виды моделей линейных стационарных динамических объектов
2. 2. Виды моделей линейных стационарных динамических объектов
Линейные непрерывные стационарные динамические объекты могут быть представлены (без учета действия шума e ( t )) в виде:
Дифференциального уравнения. Наиболее универсальная модель, имеющая форму
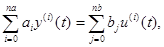
где na – порядок модели (na > nb); ai и bj – постоянные коэффициенты (параметры модели); u ( j ) ( t ) и y ( i ) ( t ) – производные, соответственно, входного и выходного сигналов.
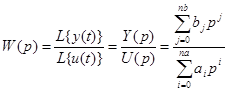
Передаточной функции. Модель определяется как отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа входного сигнала
 ,
,
где L {●} – символ преобразования Лапласа, р – переменная (оператор Лапласа).
Импульсной характеристики w ( t ) и переходной функции h ( t ). Импульсная характеристика определяется как реакция объекта на входной сигнал в виде δ-функции. Переходная функция h(t) определяется как реакция объекта на входной сигнал в виде единичного скачка. Соотношения между этими характеристиками имеют следующий вид:
L { w ( t )}= W ( p ), w ( t )= h ’ ( t ) , L { h ( t )}= W ( p )/ p
При нулевых начальных условиях связь между выходными и входными сигналами описывается интегралом свертки:
 ,
,
или в операторной форме:
 Y ( p ) = W ( p )* U ( p ) .
Y ( p ) = W ( p )* U ( p ) .
Частотной характеристики. Частотные характеристики объекта определяются его комплексным коэффициентом передачи W ( jω ). Модуль комплексного коэффициента передачи │W ( jω )│= A ( ω ) представляет собой амплитудно-частотную характеристику (АЧХ) объекта с передаточной функцией W ( p ), а аргумент arg(W ( jω ))= φ ( ω ) – фазочастотную характеристику (ФЧХ). Графическое представление W ( jω ), на комплексной плоскости при изменении ω от 0 до ∞, то есть график амплитудно-фазовой характеристики (АФХ) в полярных координатах в отечественной литературе называется годографом, а в англоязычной – диаграммой Найквиста. В теории автоматического управления часто используется логарифмическая амплитудно-частотная характеристика (ЛАЧХ), равная 20 lg │W ( jω ) │.
В 70-е годы 20 века Розенброком был создан метод «размытых» частотных характеристик, предназначенный для автоматизированного проектирования систем с несколькими входами и выходами, ориентированный на использовании средств вычислительной техники и названный в последствие методом переменных состояния (МПС). В основе этого метода лежит представление дифференциальных уравнений в нормальной форме Коши, которое дополняется алгебраическими уравнениями, связывающими выходные переменные с переменными состояния:
x’ = Ax + Bu
y = Cx, 
где u – вектор входных воздействий; y – вектор выходных воздействий; x – вектор переменных состояния; A, B, C – матрицы коэффициентов размерности n x n , n x m , r x n соответственно; n – число переменных состояния или максимальная степень производной исходного дифференциального уравнения; m – число входов; r – число выходов.
 Математическим аппаратом метода переменных состояния являются матричное исчисление и вычислительные методы линейной алгебры. Метод переменных состояния содействовал значительному развитию теории управления. На языке МПС выполнена большая часть работ по оптимальному управлению, фильтрации и оцениванию.
Математическим аппаратом метода переменных состояния являются матричное исчисление и вычислительные методы линейной алгебры. Метод переменных состояния содействовал значительному развитию теории управления. На языке МПС выполнена большая часть работ по оптимальному управлению, фильтрации и оцениванию.
Для систем с одним входом и одним выходом уравнения переменных состояния можно сформулировать следующим образом. При выборе n координат системы (объекта) в качестве переменных ее состояния (такими координатами, например, могут быть выходной сигнал y ( t ) и n -1 его производных) принимаем xi , i = 1,2,…, n и данную систему можно описать следующими уравнениями для переменных состояния:
х ′(t ) = A х( t ) + Bu( t ),
y( t ) = C х( t ) + Du( t ),
где х( t ) = [x 1 ( t ), x 2 ( t ),…, xn ( t ) ]t – вектор-столбец переменных состояния; A , B , C , и D при скалярных u ( t ) и y ( t ) – соответственно матрица размера n  n, векторы размера n
n, векторы размера n  1 и 1 n и скаляр (при векторных u( t ) и y( t ) – матрицы соответствующих размеров).
1 и 1 n и скаляр (при векторных u( t ) и y( t ) – матрицы соответствующих размеров).
Для дискретных объектов, функционирование которых представляется дискретным временем tk = kT (T – интервал дискретизации), наиболее общим видом описания является разностное уравнение (аналог дифференциального):
yk +a1yk-1 + ... +anayk – na = b1uk + b2uk – 1 + b3uk - 2 + ... + bnbuk – nb + 1 ,
где yk – i = y[(k – i)T] , uk – j = u[(k – j)T]  .
.
Связь между входом и выходом может быть отражена следующими соотношениями:
• через дискретную свертку:
 ,
,
где ω – ординаты решетчатой весовой функции объекта, или, с использованием аппарата Z – преобразования:
 , где z = e pT
, где z = e pT
• через дискретную передаточную функцию:
 ,
,
которая определяется на основании разностного уравнения после применения к обеим частям этого уравнения Z – преобразования:
На практике в большинстве случаев измерение непрерывных сигналов производится в дискретные моменты времени, что представляет определенное удобство при последующей обработке данных на ЭВМ. Поэтому представление непрерывных объектов дискретными моделями является актуальной задачей. Хотя такое представление может быть осуществлено с некоторой степенью приближенности.
|
из
5.00
|
Обсуждение в статье: Особенности построения моделей технологических объектов управления |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы