 |
Главная |


Структурный синтез механизма
|
из
5.00
|
Кинематические пары, служащие для подвижного соединения звеньев, их класс, номера и название звеньев, образующие кинематические пары , приведены в таблице 1.2.
Степень подвижности плоского механизма определяются по формуле Чебышева [1] [2].
Таблица кинематических пар
Таблица 1.2.
| Кинематические пары | Наименование звеньев образующих кинематическую пару. | |
| Обозначение | Класс | |
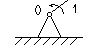
| 5 | Стойка 0 и Кривошип 1 вращательная |
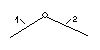
| 5 | Кривошип 1 и Шатун 2 плоскопараллельная |
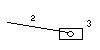
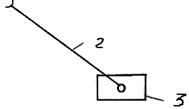
| 5 | Шатун 2 и Ползун 3 поступательная |

| 5 | Ползун 3 и Стойка 0 поступательная |
Степень подвижности механизма определяем по формуле:
W = 3 n – 2 P 5 - P 4 (1.1)
где n =3 – число подвижных звеньев;
P 5 =4 – число кинематических пар пятого класса;
P 4 =0 – число кинематических пар четвёртого класса;
Степень подвижности механизма показывает сколько ведущих звеньев у механизма и сколько нужно двигателей для этого механизма.
Подставив данные в формулу (1.1), найдём:
W = 3*3 – 2*4 – 0 = 1
Следовательно, при известном законе движения кривошипа рассматриваемая кинематическая цепь является механизмом, т.е. законом движения остальных звеньев механизма вполне определены.
Класс и порядок механизма определим, рассмотрев образование структурной схемы механизма путём применения к начальному звену группы Асура.
Схема образования механизма имеет вид:

а) б)
Рис.1.1
Схема образования механизма
а) Механизм 1- го класса, 1- го порядка;
б) Группа 2- го класса, 2- го порядка, 2 -го вида.
Таким образом, механизм является механизмом 2- го класса 2- го порядка.
Формула строения механизма имеет вид:
Механизм = первичный механизм (0 + 1) 1клас. 1поряд. ―› структурная группа (2 + 3 ) 2 клас. 2 поряд. 2 вида.
Данный механизм 2- го класса, 2- го порядка.
1.3 Построение плана положений механизма
Это построение производим в такой последовательности:
Выбираем масштабный коэффициент длины, который должен соответствовать стандартному масштабу машиностроительного черчения по ГОСТ 2.302-68 (СТСЭВ 1180-78)
Один из размеров, например, отрезок АВ=200 мм произвольно .
Тогда масштабный коэффициент определяется по формуле (1.2) :
 (м/мм) (1.2)
(м/мм) (1.2)
В принятом масштабе длин размеры звеньев механизма на чертеже будут иметь следующие значения:
 (мм) (1.3)
(мм) (1.3)
Наносим на лист неподвижную ось О и проводим горизонтальную линию αα .
Далее из т.О радиусом ОА проводим окружность которую описывает т.А кривошипа 1. Затем вычерчиваем механизм в произвольном положении, за которое принимаем положения кривошипа ОА, определяемое заданным углом φ = 90º. Из т.А проводим окружность радиуса АВ до пересечения с αα и получаем т.В, которая одновременно принадлежит αα , ползуну 3 и кривошипу 2.
Для построения планов положения механизма разделим траекторию, описываемую т.А1 кривошипа в направлении его вращения, начиная от т.А0 на 12 равных частей (считая вращение кривошипа равномерномерным). Далее описанным выше методом строим 12 положений звеньев механизма. Выделяем на плане (более толстой обводкой) схему схему механизма в заданном положении и отмечаем на нём положения центров масс звена т. S 2 .
1.4 Построение плана возможных скоростей механизма
Дан кривошипно-ползунный механизм и следующие его параметры звеньев рычажного механизма lAB = 800 мм ; lOA = 150 мм. Частота вращения кривошипа n 1 = 200 мин-1.
Находим угловую скорость ω 1 по формуле (1,4):
 ( n -1 ) (1 . 4)
( n -1 ) (1 . 4)
По направлению скорость т.А перпендикулярна кривошипу ОА и направлена в сторону угловой скорости ω 1 и вычисляется по формуле:
VA = ω 1 * lOA = 15,70796* 0,12 = 1.8849 (м / c ) (1.5)
Для построения планов скоростей найдём масштабный коэффициент скорости μ V по формуле:

 (м / мм * с) (1.6)
(м / мм * с) (1.6)
где :
Ра - длина вектора скорости т.А на плане скоростей, мм
Va – скорость т. А
Вн – точка направляющая, с которой в данный момент совпадает с точкой Р. Точка В одновременно принадлежит звеньям 2 и 3. Звено 3 совершает плоскопараллельное или поступательное движение. Воспользуемся теоремой о сложении скоростей при плоском движении тела.
Определяем модули скоростей.
Скорость точки В равна :

 (1.12)
(1.12)
Скорость точки S равна :
 (1.13)
(1.13)
Вращательная скорость кривошипа ВА равна :
 (1.14)
(1.14)
где :
 длины отрезков взятые из плана скоростей
длины отрезков взятые из плана скоростей
Определяем угловую скорость шатуна  по модулю :
по модулю :

 (1.15)
(1.15)
|
из
5.00
|
Обсуждение в статье: Структурный синтез механизма |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы