 |
Главная |


Кинематика опорно-двигательного аппарата (ОДА)
|
из
5.00
|
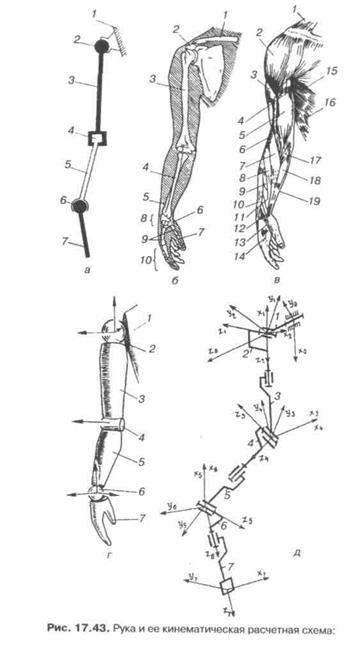
Рассмотрим кинематику руки человека (рис. 17,43). С точки зрения биомеханики, верхняя конечность может быть смоделирована многозвенным пространстввенным механизмом (рис. 17.43, д). Эта
|
система имеет семь степеней свободы. Плечевой сустав является шаровидным, т. е. имеет три степени свободы. На рис. 17.43, г он представлен эквивалентной схемой одноосных шарниров, оси вращения которых пересекаются в одной точке, а звенья 1, 2 имеют нулевую длину. Значит, положение седьмой системы координат в абсолютной, нулевой системе координат определяет формула:

где — fe — радиус-вектор точки С в абсолютной системе координатных осей; г7 — радиус-вектор точки С в седьмой системе координат.
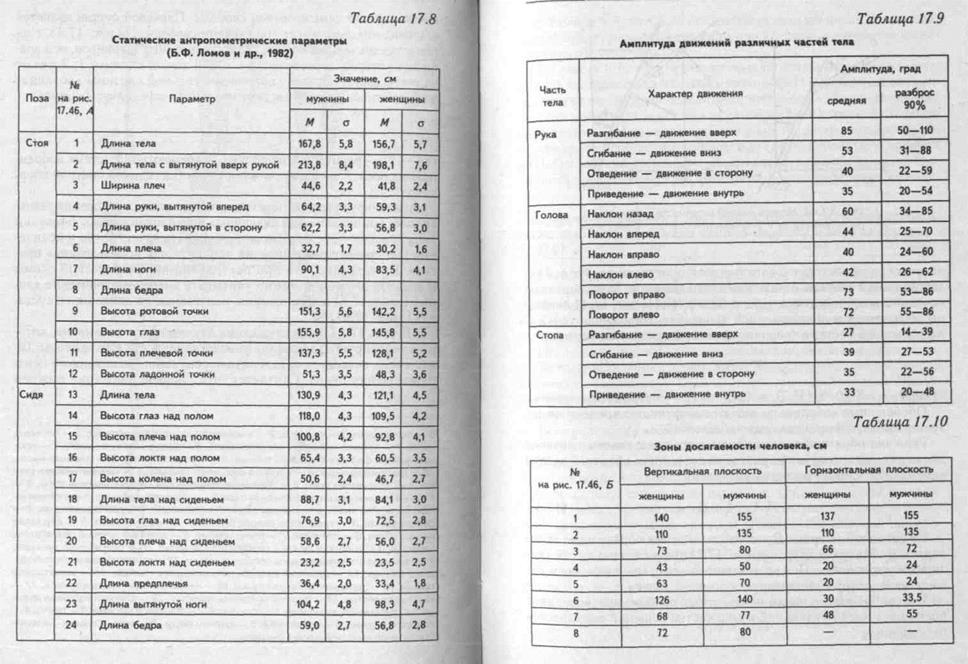
Анализируя угловые перемещения, скорости и ускорения звеньев руки при исполнении различных целенаправленных движений типа «возьми—поставь» можно оценивать качественно и количественно процесс реабилитации пациента или использование протеза. Естественно, что при построении кинематической схемы и анализа движений нужно учитывать антропометрические данные (табл. 17.8) и ограничения, налагаемые на движения в суставах (табл. 17.9).
На рис. 17.44 приведена схема двухзвенного механизма, которым моделируется движение нижней конечности в фазе опоры. Такая схема позволяет определить перемещение мгновенного центра вращения бедра. Считается, что плоское движение нижней
б — скелет руки: 1 — ключица, 2 — клювовидный отросток лопатки, 3 — плечевая кость, 4 — лучевая кость, 5 — локтевая кость, 6 — трапециевидная кость, 7 — проксимальная фаланга большого пальца, 8 — кости запястья, 9 — пястные кости, 10 — фаланги пальцев, д — система координат звеньев; а — кинематическая схема: 1 — «плечевой» пояс, 2 — плечевая сферическая кинематическая пара, 3 — плечо, 4 — локтевая цилиндрическая пара, 5 — предплечье, 6— кистевая сферическая пара, 7 — кисть, в — мышцы верхней конечности: 1 — трапециевидная, 2 — дельтовидная, 3 — трехглавая мышца плеча, 4 — клювоплечевая, 5 — двуглавая мышца плеча, 6 — плечевая, 7 — плечелучевая, 8 — длинный лучевой разгибатель запястья, 9 — короткий лучевой разгибатель запястья, 10 — разгибатель пальцев, ' 1 — длинная отводящая мышца большого пальца, 12 — короткий разгибатель большого пальца, 13 — длинный разгибатель большого пальца, 14 — межкостная мышца, 15 — передняя зубчатая мышца, 16 — наружная косая мышца живота, 17 — круглый пронатор, 18 — лучевой сгибатель запястья, 19 — длинная ладонная мышца, г — динамическая модель: 7 — туловище, 2 — плечевой шарнир, 3 — плечо, 4 — локтевой шарнир, 5 — предплечье, 6 — шарнир кисти, 7— кисть. Стрелки — компоненты мышечных моментов в суставах
|

конечности происходит в сагиттальной плоскости вокруг оси голеностопного сустава, остающейся неподвижной. За обобщенные координаты принимаются углы ф,(/) и <р2(0. На рис. 17.44 показаны абсолютная и локальные оси координат. Положение точки С в абсолютной системе координатных осей находят по формуле:

Здесь г2 = (0,0, 0, 1 )т; В2 = Л Д, где Л. — матрица положения.
Обобщенные координаты задают как функцию времени по результатам экспериментальных наблюдений.
Решение обратной задачи кинематики представляют интерес для медицины и спорта. Формальная постановка обратной задачи кинематики требует решения уравнения:

По заданной матрице В. необходимо найти обобщенные координаты g.. Матричное уравнение (17.1) эквивалентно шести скалярным уравнениям. При этом важно число степеней свободы механизма со, который модулирует органы человека.
1. Если со > 6, то число неизвестных обобщенных координат превышает число уравнений и множество решений оказывается бесконечным.
2. Если со < 6, то число неизвестных меньше числа уравнений. Задача будет иметь решение лишь при некоторых специальных положениях механизма.
3. Если со = 6, то, приравняв наддиагональные элементы матриц 4-4, стоящих слева и справа в уравнении (17.1), можно получить систему из шести трансцендентных уравнений относительно обобщенных координат g Если это решение дает законы изменения обобщенных координат во времени g.(t), то, дифференцируя g.(t), можно найти обобщенные скорости g.(t) и обобщенные ускорения g.(t). Однако при этом погрешности расчета велики из-за необходимости использования методов численного дифференцирования.
|
из
5.00
|
Обсуждение в статье: Кинематика опорно-двигательного аппарата (ОДА) |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы