 |
Главная |


Жесткость и центрирующая сила АМЦ
|
из
5.00
|
Московский ордена Ленина ордена Октябрьской революции и ордена Трудового Красного Знамени государственный технический университет имени Н.Э. Баумана
АКТИВНЫЙ МАГНИТНЫЙ ПОДВЕС
Методические указания к лабораторной работе по курсу
«Расчет и конструкции элементов гироскопических приборов и систем»
Составили: Баркан В.С.
Герди В.Н .
Крикун В.М.
Москва, 1995 г
АКТИВНОЕ МАГНИТНОЕ ЦЕНТРИРОВАНИЕ (АМЦ) ЧУВСТВИТЕЛЬНЫХ
ЭЛЕМЕНТОВ (ЧЭ) ГИРОСКОПИЧЕСКИХ ПРИБОРОВ И АКСЕЛЕРОМЕТРОВ.
Цель работы: Изучить принципы действия, структурную схему и силовые характеристики активного магнитного подвеса. Экспериментально определить модуляционную характеристику блока управления активным магнитным подвесом и связанные с ней силовые характеристики.
Назначение элемента: Активный магнитный подвес используют в высокоточных поплавковых интегрирующих гироскопах и акселерометрах в качестве опор ЧЭ.
Состав лабораторной установки:
1. Трёхосный стол прецизионных поступательных перемещений с центрирующим элементом типа «восьмиполюсный микросин».
2. Электронный блок управления активным магнитным подвесом.
3. Стандартные электроизмерительные приборы:
- генератор сигналов низкой частоты Г3-118;
- милливольтметр В3-39;
- осциллограф С1-99;
- источники питания Б5-48;
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ.
Структура АМЦ с ШИМ.
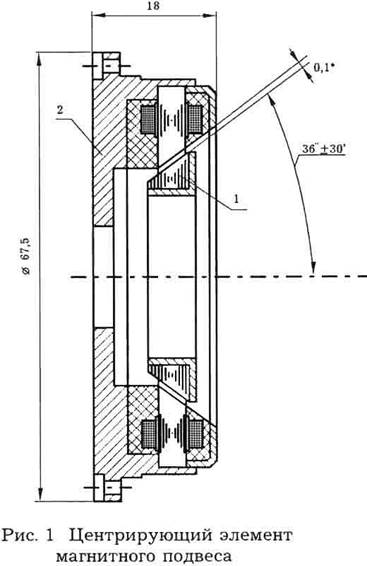
АМЦ представляет собой трёхканальную систему автоматического регулирования. В АМЦ используется совмещённый индуктивный элемент центрирования (ЭЦ) (рис. 1), обмотки которого одновременно выполняют функции датчика перемещений, фиксирующего положение ротора относительно статора им силового элемента, обеспечивающего центрирование ЧЭ.
В цепи обратной связи применено усилительно-преобразовательное устройство с временной селекцией на базе широтно-импульсной модуляции (ШИМ). Использование временной селекции исключает эффект взаимодействия сигнальных магнитных потоков с силообразующими, свойственный системам АМЦ с совмещенными датчиками перемещения и силы. При наличии такого взаимодействия величина магнитной проницаемости ферромагнитного материала ЭЦ может сильно зависеть от подмагничивающего воздействия силообразующего магнитного потока. Схемы с ШИМ обеспечивают постоянство амплитуды управляющих импульсов, что оказывает благоприятное воздействие на стабильность магнитных параметров статора и ротора и, следовательно, на стабильность нуля центрирования.
Использование экономически выгодных усилителей мощности позволяет получить большую начальную жесткость и площадь силовой характеристики по сравнению со схемами с амплитудно-импульсной и частотно-импульсной модуляцией.
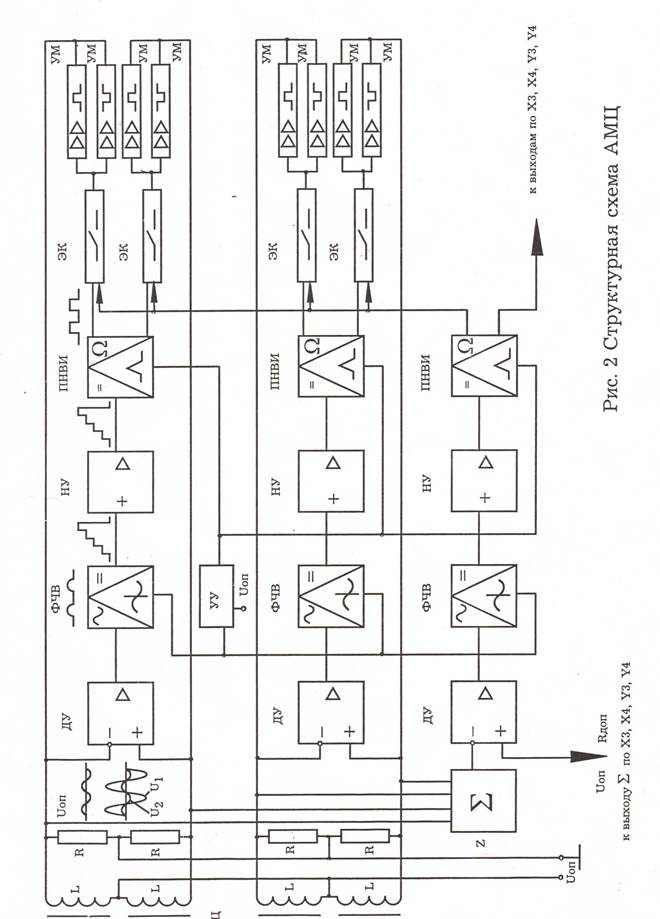
Структурная схема системы АМЦ для одного ЭЦ представлена на рис. 2.
Датчики перемещений по осям X и Y выполнены в виде мостовых схем переменного тока, плечи которых образованы сопротивлением R и индуктивностями обмоток L ЭЦ. Информация о положении ЧЭ по радиальным осям (в виде переменного напряжения опорной частоты с фазой j=jоп или j=jоп-1800)вырабатывается по диагонали соответствующего моста путём сравнения мгновенных значений напряжений
на противоположных обмотках. Изменение напряжения на диагонали моста линейно зависит от перемещений ЧЭ:
Ux(y)max=[UопR/ R+rобм)](Xmax/s0)cosj
Информация о положении ЧЭ по аксиальной оси Z образуется путём сравнения суммы напряжений на обмотках ЭЦ и регулируемого напряжения Uоп, снимаемого с потенциометра Rдоп:
Uz max=[4UопR/ R+rобм)]±UR доп
С диагоналей мостовых схем датчиков перемещений сигналы поступают на предварительные дифференциальные усилители (ДУс). На выходе ДУс образуется усиленный разностный сигнал рассогласования моста переменного напряжения. Этот сигнал поступает на фазочувствительный выпрямитель (ФЧВ), выполненный по схеме синхронного детектора. На выходе с ФЧВ образуется постоянное напряжение, величина которого пропорциональна перемещению, а полярность зависит от направления перемещения. После ФЧВ постоянное напряжение усиливается неинвертирующим усилителем (НУ) для обеспечения требуемого коэффициента преобразования системы АМЦ.
Формирование управляющих импульсов происходит в преобразователе «постоянного напряжения-временной интервал» (ПНВИ), выполненном по схеме ШИМ с двойным интегрированием. Функционирование ПНВИ обеспечивается импульсами ТПИ, поступающими из устройства управления (УУ). ПНВИ имеет два выхода, подключённых к электронным коммутаторам (ЭК). С выхода ПНВИ снимается пара однополярных прямоугольных импульсов Uупр, длительность которых пропорциональна усиленному напряжению на выходе ФЧВ.
В зависимости от соотношения выходных напряжений выходные пары импульсов Uупр в соответствии с алгоритмом работы системы АМЦ поступают на тот или иной выход ПНВИ.
ЭК управляют выходными импульсными усилителями мощности (УМ). С выхода УМ импульсы передаются в обмотки ЭЦ. При этом при приходе на ЭК пары однополярных импульсов, в обмотки ЭЦ поступает один положительный и один отрицательных импульс Uвых. За счет этого исключается возможность намагничивания сердечников ЭЦ. УМ работают в режиме насыщения.
Устройство управления (УУ) формирует серию синхроимпульсов, обеспечивающих требуемый алгоритм работы электронного блока. В качестве тактовой частоты в УУ используется Uоп.
Для центрирования по оси Z входные напряжения с обмоток ЭЦ поступают на резистивные сумматоры. Суммарное напряжение по X1, X2, Y1, Y2 передаётся на инвертирующий вход ДУс. На неинвертирующий вход ДУс подаётся суммарное напряжение (UR доп), снимаемое с резистивного сумматора по X3,X4,Y3,Y4.
С выхода ДУс сигнал идёт на ФЧВ, дополнительный усилитель и ПНВИ. Один выход ПНВИ подключен параллельно ко входам ЭК, управляющих обмотками X1, X2, Y1, Y2.Второй выход подключается к входам ЭК, управляющих обмотками X3,X4,Y3,Y4( в лабораторной работе отсутствуют).
Работа системы АМЦ строится по принципу временного разделения управления по радиальным и аксиальным осям.
В УУ вырабатываются последовательно чередующиеся импульсы синхронизации: цикл «Х» , цикл «Y» и цикл «Z», следующие с частотой 75 Гц. При этом частота следования каждого цикла 25 Гц. Возможно совмещение во времени импульсов синхронизации по радиальным осям X и Y при сохранении временного разделения с импульсами синхронизации по оси Z.
Начало каждого цикла синхронизации отводится для измерения сигналов о положении ЧЭ по соответствующей оси. Оставшаяся часть цикла используется для формирования пары разнополярных управляющих импульсов и обнуления преобразующих электронных схем.
Временная диаграмма работы системы АМЦ представлена на рис. 3.
Во время цикла «Х» управляющие импульсы с выходных усилителей поступают на одну из обмоток радиальной оси Х1, Х2. Во время цикла «Y» импульсы идут на одну из обмоток радиальной оси Y1, Y2; во время цикла «Z» управляющие импульсы одновременно передаются во все обмотки того или иного ЭЦ. По каждой из осей центрирования реализуется следующий алгоритм работы: управляющие импульсы посылаются в те обмотки, где зазор между ротором и статором ЭЦ увеличился. Перед управляющими импульсами во все обмотки ЭЦ одновременно из УУ через ЭК и УМ подаются импульсы начального смещения ( заштрихованная Uвых).
Жесткость и центрирующая сила АМЦ.
Ток в обмотках на полюсах центрирующего элемента АМЦ с ШИМ изменяется по экспоненциальному закону:
I(t)=Im(1-e-t/tв), (1)
Где Im – установившееся значение тока импульса АМЦ;
 (2)
(2)
Где  - постоянная времени центрирующего элемента;
- постоянная времени центрирующего элемента;
W- число витков обмотки;
R0- магнитное сопротивление рабочих зазоров;
r- омическое сопротивление;
 - выходное сопротивление блока управления;
- выходное сопротивление блока управления;
 - сопротивление потерь в статоре и роторе ЭЦ;
- сопротивление потерь в статоре и роторе ЭЦ;
 – дополнительное сопротивление, необходимое для уменьшения ;
– дополнительное сопротивление, необходимое для уменьшения ;
Предполагается, что блок управление АМУ обеспечивает модуляционную характеристику длительности импульсов тока управления, представленную на рис. 4
(τ0- начальная длительность импульсов ШИМ; τm – набольшая длительность импульсов ШИМ; k’ –крутизна модуляционной характеристики, мкс/ мкм; τ1 ,τ2 – длительность центрирующих импульсов ШИМ; Δ-перемещение ротора центрирующего элемента).
Если пренебречь влиянием заднего фронта центрирующего импульса, то средняя за период T широтно-модулированных импульсов блока управления АМЦ сила притяжения одного полюса равна:

Где τ- длительность импульсов (τ<T);
 –магнитная проницаемость вакуума;
–магнитная проницаемость вакуума;
S – площадь одного полюса центрирующего элемента (рис. 1).
После интегрирования:
 (3)
(3)
 где Fm - наибольшая сила притяжения одного полюса;
где Fm - наибольшая сила притяжения одного полюса;
 (4)
(4)
g -отношение постоянной времени обмотки центрирующего элемента к периоду ШИМ
g=τ/T ; (5)
b -параметр длительного импульса, показывающий, во сколько раз длительность импульса превышает постоянную времени центрирующего элемента;
b = τ/ τв ; (6)
Радиальная центрирующая сила электромагнитного подвеса Fцх, в создании которой участвуют 4 пары полюсов двух восьмиполюсных центрирующих элементов, равна:

гдеF1 иF2 –силы притяжения противоположных полюсов одного центрирующего элемента.
С учётом (3):
 (7)
(7)
где b1и b2 – безразмерные параметры (см. (6)) длительности импульса в обмотках противоположны магнитопроводов одного центрирующего элемента;

Где  -угол скоса полюсов (Рис. 1).
-угол скоса полюсов (Рис. 1).
Если модуляционная характеристика АМЦ с ШИМ имеет вид, представленный на Рис. 4, то при положительном смещении ротора ΔXв направлении оси X можно записать:
b1 = τ1/ τв= τ0/ τв=b0;
b2 = τ2/ τв=(τ0+k’|Δ|)/ τв , |Δ|≤( τm- τ0)/ k’, Δ=Δxcos(p/8); (8)
b2 = τ2/ τв = τm/ τв=bm , |Δ|>|≤( τm- τ0)/ k’ ,
Где b0 –параметр длительности начального импульса;
bm –параметр максимального регулирующего импульса длительностьюτm;
Первое из соотношений (8) отражает постоянство регулирующего импульса напряжения блока управления АМЦ, поступающего в полюс, рабочий зазор которого уменьшается. Второе соотношение показывает линейное увеличение длительности регулирующего импульса блока управления АМЦ в полюсе, рабочий зазор которого увеличивается. Третье соотношение учитывает зону насыщения модуляционной характеристики.
Подставим выражения (8) для b1и b2 в (7), получим для линейного участка модуляционной характеристики:
 (9)
(9)

Где  - отношение крутизны модуляционной характеристики к постоянной времени выходной цепи импульсного усилителя мощности.
- отношение крутизны модуляционной характеристики к постоянной времени выходной цепи импульсного усилителя мощности.
Отсюда с учетом (5) радиальная жесткость активного магнитного подвеса в центральном положении ротора при Δ=0 и произвольном b равна:
 (10)
(10)
Где  –доля периода, на которую увеличивается ШИМ-сигнал блока управления АМЦ при единичном радиальном смещении ротора.
–доля периода, на которую увеличивается ШИМ-сигнал блока управления АМЦ при единичном радиальном смещении ротора.
Требуемая начальная жесткость подвеса достигается соответствующим выбором относительной крутизны модуляционной характеристики блока управления АМЦ и параметраb0 – длительность начального импульса.
Из (9), с учетом (5) наибольшая радиальная центрирующая сила АМЦ равна:
 (11)
(11)
Анализ этого соотношения показывает, что центрирующая сила АМЦ на линейном участке модуляционной характеристики линейно зависит от перемещения лишь при достаточно больших значениях b0. В этом случае, например 0,04 и им можно пренебречь.
Наибольшая осевая центрирующая сила, в создании которой участвуют 8 пар полюсов двух центрирующих элементов, равна:
 (12)
(12)
где  –осевая сила притяжения одного полюса;
–осевая сила притяжения одного полюса;
Начальная осевая жесткость активного магнитного подвеса в центральном положении ротора при произвольном b0 равна:
 (13)
(13)
где – доля периода, на которую увеличивается ШИМ-сигнал блока управления АМЦ при единичном осевом смещении ротора.
|
из
5.00
|
Обсуждение в статье: Жесткость и центрирующая сила АМЦ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы