 |
Главная |


СХЕМЫ КРИВОШИПНО-ПОЛЗУННЫХ МЕХАНИЗМОВ
|
из
5.00
|
| Задание | Схема |

| |

| |

| |
| |

| |

| |
| |

| |

| |

|
ЧИСЛОВЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
| Величина | Предпоследняя цифра | |||||||||
| ОА, мм | ||||||||||
| АВ, мм | ||||||||||
| АС, мм | ||||||||||
| AS2, мм | ||||||||||
| е, мм | ||||||||||
| φ, град | ||||||||||
| ω1, 1/сек | ||||||||||
| m1, кг |  (длина ОА поставляется в метрах) (длина ОА поставляется в метрах)
| |||||||||
| m2, кг |  (длина ВС поставляется в метрах) (длина ВС поставляется в метрах)
| |||||||||
| m3, кг | 
| |||||||||
IS2, 
|  (длина ВС поставляется в метрах) (длина ВС поставляется в метрах)
|
УКАЗАНИЯ К ВЫПОЛНЕНИЮ ЗАДАЧИ №2
Порядок построения кинематической схемы механизма в заданном положении.
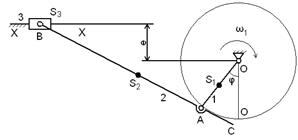
Кинематическая схема механизма в заданном положении строится в масштабе с использованием условных обозначений звеньев и кинематических пар.
При этом необходимо учитывать, что траектория точки А кривошипа – окружность радиуса ОА, описываемая вокруг стойки О. Траектория ползуна В – прямая линия.
1. Начертить условное обозначение стойки О.
2. От оси О-О в направлении угловой скорости  отложить заданный угол
отложить заданный угол  .
.
3. От стойки О отложить длину ОА.
4. От стойки О отложить длину эксцентриситета е в направлении, указанном на схеме.
5. На расстоянии е провести прямую линию, соответствующую траектории ползуна В.
6. Из точки А радиусом АВ сделать циркулем засечку на проведенной прямой линии. На пересечении прямой и дуги получим точку В.
7. Соединяем прямой линией точки А и В.
8. От точки A на продолжении прямой АВ откладываем отрезок AС.
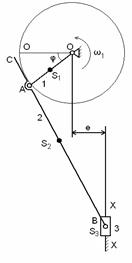
ПРИМЕР №2
Дано:
Угловая скорость кривошипа является постоянной и равна  .
.
Размеры звеньев:
ОА = 20мм, АВ = 76мм, AС = 26мм.
Для расчета используются формулы, приведенные в приложении 2.
Решение
Определение скоростей точек звеньев и угловых скоростей звеньев для заданного положения механизма.
Определение скорости точки А.
 .
.
Вектор скорости  перпендикулярен кривошипу ОА.
перпендикулярен кривошипу ОА.
Выбираем масштаб плана скоростей  .
.
Найдём отрезок, изображающий вектор скорости на плане:
 .
.
Из полюса плана скоростей  откладываем данный отрезок в направлении, перпендикулярном ОА в направлении угловой скорости .
откладываем данный отрезок в направлении, перпендикулярном ОА в направлении угловой скорости .
Определение скорости точки В.
Запишем векторное уравнение:
 .
.
Направления векторов скоростей:
 ,
,  .
.
Продолжим строить план скоростей.
Из конца вектора  (точка a) проводим направление вектора
(точка a) проводим направление вектора  . Из полюса (точка pV) проводим направление вектора
. Из полюса (точка pV) проводим направление вектора  . На пересечении двух проведённых направлений получим точку b. Измеряя длины полученных отрезков и умножая их на масштаб
. На пересечении двух проведённых направлений получим точку b. Измеряя длины полученных отрезков и умножая их на масштаб  , получим значения скоростей:
, получим значения скоростей:
 ;
;
 .
.
Кинематическая схема механизма 

План скоростей 
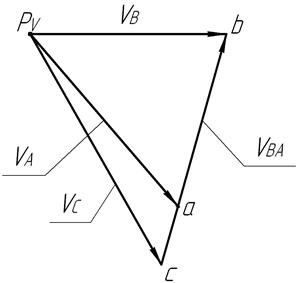
Определение скорости точки С.
Воспользуемся следствием из теоремы подобия. Составим пропорцию:

Данный отрезок откладываем на продолжении отрезка ab. Точку c соединяем с полюсом PV.
Величина скорости точки С:


|
из
5.00
|
Обсуждение в статье: СХЕМЫ КРИВОШИПНО-ПОЛЗУННЫХ МЕХАНИЗМОВ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы