 |
Главная |


Тангенциальное ускорение
|
из
5.00
|
Виды ускорений в СТО.
Итак, мы показали, что существует два вида измеримых скоростей. Кроме того, быстрота, измеряемая в тех же единицах, тоже очень интересна. При малых значениях все эти скорости равны.
А сколько же существует ускорений? Какое ускорение должно быть константой при равноускоренном движении релятивистской ракеты, чтобы космонавт всегда оказывал на пол ракеты одну и ту же силу, чтобы он не стал невесомым, или чтобы он не умер от перегрузок?
Введем определения разных видов ускорений.
Координатно-координатное ускорение dv/dt это изменение координатной скорости, измеренное по синхронизированным координатным часам, расставленным по ходу движения пробного тела:
dv/dt=d2r/dt2.
Забегая вперед, заметим , что dv/dt = 1·dv/dt = g0dv/dt.
Координатно-собственное ускорение dv/dt это изменение координатнойскорости, измеренное по собственным часам, связанным с движущимся телом:
dv/dt=d(dr/dt)/dt = gd2r/dt2.
dv/dt = g1dv/dt.
Собственно-координатное ускорение db/dt это изменение собственной скорости, измеренное по синхронизированным координатным часам, расставленным по ходу движения пробного тела:
db/dt = d(dr/dt)/dt = g3v(vdv/dt)/c2 + gdv/dt.
Если v|| dv/dt, тогда db/dt = g3dv/dt.
Если vперпендикулярно dv/dt, тогда db/dt = gdv/dt.
Собственно-собственное ускорениеdb/dt это изменение собственнойскорости, измеренное пособственным часам, связанным с движущимся телом:
db/dt = d(dr/dt)/dt = g4v(vdv/dt)/c2 + g2dv/dt.
Если v|| dv/dt, тогдаdb/dt = g4dv/dt.
Если vперпендикулярно dv/dt, тогда db/dt = g2dv/dt.
Сравнивая показатели при коэффициенте g в четырех типах ускорений, записанных выше, замечаем, что в этой группе отсутствует член с коэффициентом g2 при параллельных ускорениях. Но мы еще не взяли производные от быстроты. Это ведь тоже скорость. Возьмём производную по времени от быстроты, воспользовавшись формулой v/c = th(r/c):
dr/dt = (c·arth(v/c))' = g2dv/dt.
А если взять dr/dt, получим:
dr/dt = g3dv/dt,
или dr/dt = db/dt.
Следовательно, мы имеем две измеримые скорости v и b, и ещё одну, неизмеримую, но наиболее симметричную, быстроту r. И шесть видов ускорений, два из которых dr/dt и db/dt совпадают. Какое же из этих ускорений является собственным, т.е. ощущаемым ускоряющимся телом?
К собственному ускорению мы вернемся ниже, а пока выясним, какое ускорение входит во второй закон Ньютона. Как известно, в релятивистской механике второй закон механики, записанный в видеf=ma, оказывается ошибочным. Вместо него силу и ускорение связывает уравнение
f = m (g3v(va)/c2 + ga),
которое является основой для инженерных расчетов релятивистских ускорителей. Если мы сравним это уравнение с только что полученным уравнением для ускорения db/dt:
db/dt = g3v(vdv/dt)/c2 + gdv/dt,
то заметим, что они отличаются лишь множителем m. То есть, можно записать:
f= m·db/dt.
Последнее уравнение возвращает массе статус меры инертности в релятивистской механике. Сила, действующая на тело, пропорциональна ускорению db/dt. Коэффициентом пропорциональности является инвариантная масса. Вектора силы fиускорение db/dt сонаправлены при любой ориентации векторов vиa, или b и db/dt.
Формула, записанная через ускорение dv/dt, не дает такой пропорциональности. Сила и координатно-координатное ускорение в общем случае не совпадают по направлению. Параллельными они будут лишь в двух случаях: если вектора vиdv/dtпараллельны друг другу, и если они перпендикулярны друг другу. Но в первом случае сила f=mg3dv/dt, а во втором - f=mgdv/dt.
Таким образом, в законе Ньютона мы должны использовать ускорение db/dt, то есть, изменениесобственной скоростиb, измеренное по синхронизированным часам.
Возможно с таким же успехом можно будет доказать, что f= mdr/dt, где dr/dt - вектор собственного убыстрения, но быстрота величина неизмеримая, хотя и легко вычисляема. Будет ли верно векторное равенство, сказать не берусь, но скалярное равенство справедливо в силу того, что dr/dt=db/dt и f=mdb/dt.
Ускорение – это величина, которая характеризует быстроту изменения скорости.
Например, автомобиль, трогаясь с места, увеличивает скорость движения, то есть движется ускоренно. Вначале его скорость равна нулю. Тронувшись с места, автомобиль постепенно разгоняется до какой-то определённой скорости. Если на его пути загорится красный сигнал светофора, то автомобиль остановится. Но остановится он не сразу, а за какое-то время. То есть скорость его будет уменьшаться вплоть до нуля – автомобиль будет двигаться замедленно, пока совсем не остановится. Однако в физике нет термина «замедление». Если тело движется, замедляя скорость, то это тоже будет ускорение тела, только со знаком минус (как вы помните, скорость – это векторная величина).
Среднее ускорение
Среднее ускорение> – это отношение изменения скорости к промежутку времени, за который это изменении произошло. Определить среднее ускорение можно формулой:

где  – вектор ускорения.
– вектор ускорения.
Направление вектора ускорения совпадает с направлением изменения скорости Δ  = - 0 (здесь 0 – это начальная скорость, то есть скорость, с которой тело начало ускоряться).
= - 0 (здесь 0 – это начальная скорость, то есть скорость, с которой тело начало ускоряться).
В момент времени t1 (см. рис 1.8) тело имеет скорость 0. В момент времени t2 тело имеет скорость . Согласно правилу вычитания векторов найдём вектор изменения скорости Δ = - 0. Тогда определить ускорение можно так:


Рис. 1.8. Среднее ускорение.
В СИ единица ускорения – это 1 метр в секунду за секунду (или метр на секунду в квадрате), то есть

Метр на секунду в квадрате равен ускорению прямолинейно движущейся точки, при котором за одну секунду скорость этой точки увеличивается на 1 м/с. Иными словами, ускорение определяет, насколько изменяется скорость тела за одну секунду. Например, если ускорение равно 5 м/с2, то это означает, что скорость тела каждую секунду увеличивается на 5 м/с.
Мгновенное ускорение
Мгновенное ускорение тела (материальной точки) в данный момент времени – это физическая величина, равная пределу, к которому стремится среднее ускорение при стремлении промежутка времени к нулю. Иными словами – это ускорение, которое развивает тело за очень короткий отрезок времени:

Направление ускорения также совпадает с направлением изменения скорости Δ при очень малых значениях промежутка времени, за который происходит изменение скорости. Вектор ускорения может быть задан проекциями на соответствующие оси координат в данной системе отсчёта (проекциями аХ, aY, aZ).
При ускоренном прямолинейном движении скорость тела возрастает по модулю, то есть
v2 > v1а направление вектора ускорения совпадает с вектором скорости 2.
Если скорость тела по модулю уменьшается, то есть
v2 < v1то направление вектора ускорения противоположно направлению вектора скорости 2. Иначе говоря, в данном случае происходит замедление движения, при этом ускорение будет отрицательным (а < 0). На рис. 1.9 показано направление векторов ускорения при прямолинейном движении тела для случая ускорения и замедления.
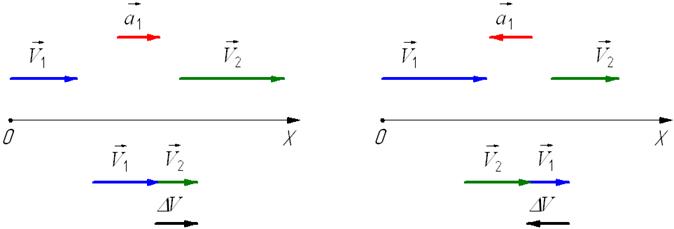
Рис. 1.9. Мгновенное ускорение.
При движении по криволинейной траектории изменяется не только модуль скорости, но и её направление. В этом случае вектор ускорение представляют в виде двух составляющих (см. следующий раздел).
Тангенциальное ускорение
Тангенциальное (касательное) ускорение – это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении.

Рис. 1.10. Тангенциальное ускорение.
Направление вектора тангенциального ускорения τ (см. рис. 1.10) совпадает с направлением линейной скорости или противоположно ему. То есть вектор тангенциального ускорения лежит на одной оси с касательной окружности, которая является траекторией движения тела.
Нормальное ускорение
Нормальное ускорение – это составляющая вектора ускорения, направленная вдоль нормали к траектории движения в данной точке на траектории движения тела. То есть вектор нормального ускорения перпендикулярен линейной скорости движения (см. рис. 1.10). Нормальное ускорение характеризует изменение скорости по направлению и обозначается буквой n. Вектор нормального ускорения направлен по радиусу кривизны траектории.
Полное ускорение
Полное ускорение при криволинейном движении складывается из тангенциального и нормального ускорений по правилу сложения векторов и определяется формулой:

(согласно теореме Пифагора для прямоугольно прямоугольника).
Направление полного ускорения также определяется правилом сложения векторов:
= τ + n
|
из
5.00
|
Обсуждение в статье: Тангенциальное ускорение |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы