 |
Главная |


Методические указания к схемам 10 – 18
|
из
5.00
|
1. Определяется крутящий момент на валу.
2. По формуле (3.4) определяется наименьший диаметр вала и выбираются посадочные диаметры для подшипников (кратны 5 мм) и ступицы колеса (для выбора шпонки).
3. По формулам (3.1 – 3.3) определяются силы, действующие на вал от зубчатых колес.
4. Выбирается расчетная схема вала (пункт 4 параграфа 1).
5. Определяются реакции опор в вертикальной и горизонтальной плоскости и по формуле (3.13) находятся радиальные нагрузки на подшипники.
6. Далее смотри подраздел «порядок подбора подшипников».
Задача 4
Структурный анализ плоских шарнирно – рычажных
Шестизвенных механизмов
Для заданной кинематической схемы плоского шарнирно – рычажного шестизвенного механизма произвести структурный анализ и определить класс механизма
Схема № 1 Долбежный станок Схема № 2 Долбежный станок

Схема № 3 Долбежный станок Схема № 4 Зубодолбежный станок

Схема №5 Строгальный станок Схема № 6 Поперечно-строгальный станок с вращающейся кулисой

Схема № 7 Поперечно-строгальный Схема № 8 Поперечно-строгальный
Станок с качающейся кулисой

Схема № 9 Поперечно-строгальный Схема № 10 Механизм кривошипно-
Станок с качающейся кулисой коленной овощерезки

Схема № 11 Качающейся конвейер Схема № 12 Качающийся конвейер

Схема № 13 Качающейся конвейер Схема № 14 Качающийся конвейер
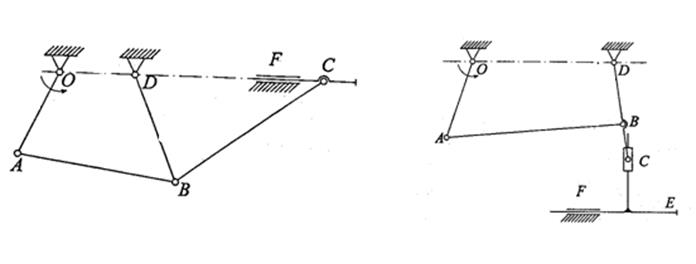
Схема № 15 Качающейся конвейер Схема № 16 Качающийся конвейер

Схема № 17 Качающейся конвейер Схема № 18 Качающийся конвейер
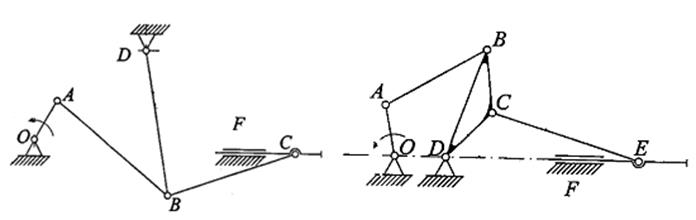
Рисунок 4.1 Схемы механизмов
Пример решения задачи 4
Структурный анализ рычажного механизма.
 По заданной структурной схеме выполним структурный анализ.
По заданной структурной схеме выполним структурный анализ.
O (1;6) Vкл, В
A (1;2) Vкл, В
B (2;3) Vкл, В
B' (2;4) Vкл, В
C (3;6) Vкл, В
D (4;5) Vкл, В
F (5;6) Vкл, П
1 – кривошип;
2 – шатун;
3 – коромысло;
4 – шатун;
5 – ползун;
6 – стойка.
Число W степеней свободы кинематической цепи относительно звена, принятого за неподвижное, называется числом степеней свободы кинематической цепи или, кратко, степенью свободы.
Если кинематическая цепь образована парами только V класса, то формула принимает следующий вид:

где n – число подвижных звеньев кинематической цепи.
У нас 5 подвижных звеньев и 7 кинематических пар V класса, подставим в уравнение и получим:

 Разбиваем на группы Асура
Разбиваем на группы Асура
I

II


III

IV

Механизм II класса шестизвенный кривошипно-ползунный
Рассмотрено на заседании Одобрено учебно-методическим
кафедры «ДАиПМ» бюро АСФ
«____» ____________ 2015г. Протокол № _____
Протокол № ______ Председатель учебно-методического
Зав. кафедрой «ДАиПМ» бюро АСФ
_____________ Танирбергенова А.А. ____________ Орынтаева Г.Ж.
«____» _____________ 2015 г.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
и задачи к контрольным работам
по дисциплинам «Механика», «Прикладная механика» и
«Теоретические основы машиноведения»
для всех специальностей
студентов очной и заочной форм обучения
Разработали: Бакиров Ж.Б.,
Безкоровайный П.Г.
Редактор ____________
Подписано к печати_____________ Формат __60х90/16 Тираж _120 экз.
Объем _____________ уч. изд. л. Заказ № __________ Цена договорная
Печатно-множительная мастерская КарГТУ. Караганда, Бульвар Мира, 56)
|
из
5.00
|
Обсуждение в статье: Методические указания к схемам 10 – 18 |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы