 |
Главная |


Зависимость между моментами силы относительно точки и оси , проходящей через эту точку
|
из
5.00
|
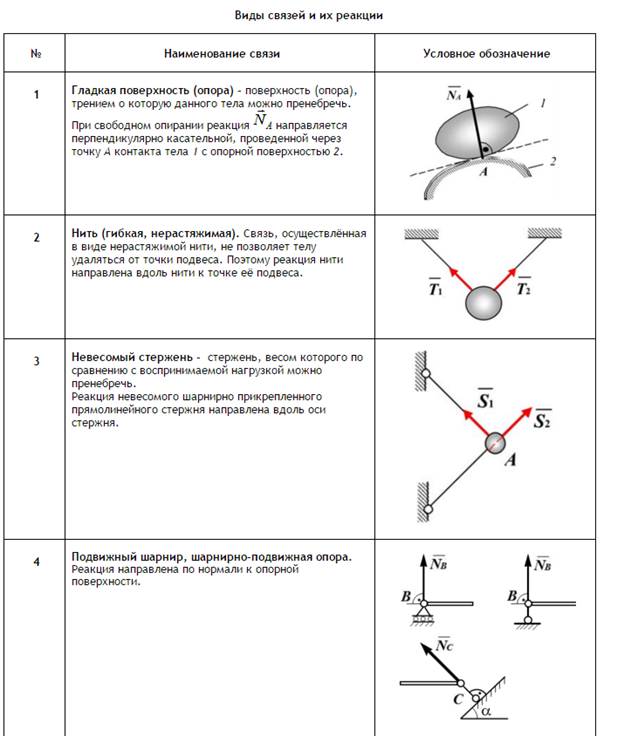
Виды связей
Связяминазываются любые ограничения, препятствующие перемещению тела в пространстве.
Тело, стремясь под действием приложенных сил осуществить переме-щение, которому препятствует связь, будет действовать на нее с некоторой силой, называемой силой давления на связь. По закону о равенстве действия и противодействия, связь будет действовать на тело с такой же по модулю, но противоположно направленной силой.
Сила, с которой данная связь действует на тело, препятствуя тем или иным перемещениям, называется силой реакции (реакцией) связи.
Одним из основных положений механики является принцип освобождаемости от связей: всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие реакциями связей. Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу. Основные виды связей и их реакции приведены в таблице 1.1.




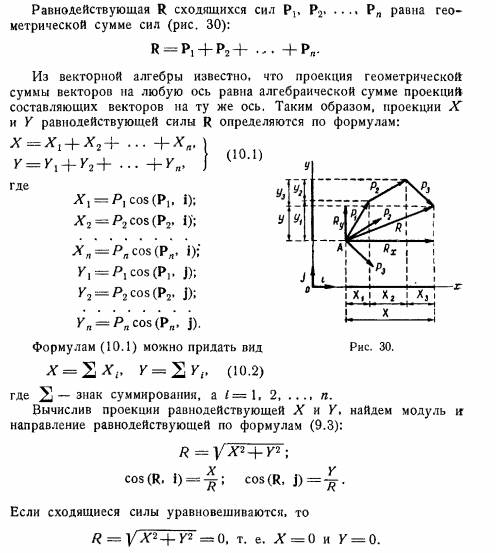
Силовой многоугольник . Геометрическое условие равновесия системы сходящихся сил



Силовым многоугольником системы сходящихся сил называют многоугольник, построенный на ее векторах (силах). Построение многоугольника можно осуществить в произвольном порядке так, чтобы конец одного вектора являлся началом другого, переносимого параллельно его линии действия.
Вектор  , замыкающий силовой многоугольник, начало и конец которого совпадают соответственно с началом первого и концом последнего векторов системы, является геометрической суммой этой системы сил.
, замыкающий силовой многоугольник, начало и конец которого совпадают соответственно с началом первого и концом последнего векторов системы, является геометрической суммой этой системы сил.

Аналитические условия равновесия системы сил






Теорема о равновесии 3-х непараллельных сил лежащих в одной плоскости

Понятие момента силы


Векторный момент силы относительно точки

Алгебраический момент силы относительно точки


Понятие момента силы относительно оси

Зависимость между моментами силы относительно точки и оси , проходящей через эту точку
Если к абсолютно твердому телу приложена произвольная пространственная система сил, то изучение ее действия на это тело, в отличие от системы сходящихся сил, требует введения новых понятий. В частности, определения моментов силы относительно точки (центра) и оси.
Теперь введем понятие момента силы сформулировав его следующим образом: моментом силы относительно какой-либо точки называется вектор, численно равный произведению модуля силы на плечо и направленный перпендикулярно к плоскости содержащей силу и выбранную точку, таким образом, чтобы с конца этого вектора можно было бы видеть стремление силы вращать тело против движения часовой стрелки.
Так как существуют правая и левая системы координат, то следует конкретно выбрать одну из них, чтобы единым образом определить направление векторного момента силы относительно точки. В дальнейшем будем пользоваться только первой системой координат. Это позволяет применить "правило буравчика", хорошо известное читателям еще со школьной скамьи.
Итак пусть даны сила  , приложенная в точке А какого-либо абсолютно твердого тела, и некоторый центр О (рис.2.11). Тогда моментом силы относительно точки О называется вектор, приложенный к центру (или точке) О, направленный перпендикулярно к плоскости треугольника ОАВ в ту сторону, откуда поворот тела, совершаемый силой, виден против хода стрелки часов (по правилу буравчика) и численно равный удвоенный площади треугольника ОАВ, иначе, этот вектор можно представить как векторное произведение радиуса-вектора
, приложенная в точке А какого-либо абсолютно твердого тела, и некоторый центр О (рис.2.11). Тогда моментом силы относительно точки О называется вектор, приложенный к центру (или точке) О, направленный перпендикулярно к плоскости треугольника ОАВ в ту сторону, откуда поворот тела, совершаемый силой, виден против хода стрелки часов (по правилу буравчика) и численно равный удвоенный площади треугольника ОАВ, иначе, этот вектор можно представить как векторное произведение радиуса-вектора  (т.е вектор, направленный от моментной точки О, к точке А приложения силы и модуль которого равен длине между этими точками) на силу, т.е.
(т.е вектор, направленный от моментной точки О, к точке А приложения силы и модуль которого равен длине между этими точками) на силу, т.е.
 = х . (2.11)
= х . (2.11)

Рис.2.11.
Здесь для вектора момента силы введено обозначение , где в индексе указывается точка, относительно которой берется момент, а внутри скобки сила, действующая на тело и сверху символа проводится прямая, означающая, что эта
величина является векторной. Кроме этого обозначения в существующих литературах по теоретической механике применяются и такие обозначения  ,
,  .
.
Теперь докажем, что модуль вектора , представленного формулой (2.11) равен произведению величины силы на плечо, а направление векторного произведения двух векторов и , т.е. х точно совпадает с направлением вектора .
Как известно из векторной алгебры, модуль векторного произведения равен площади параллелограмма, построенного на векторах сомножителях и , т.е.
| × |=rF×sin(  ).
).
Однако из прямоугольного треугольника KOA, где OK=h, имеем rsin( )=h. Следовательно, rFsin( )=F×h=m0( ). Это выражение дает, что модуль вектора равен числовому значению вектора . Кроме того, вектор, равный векторному произведению х направлен по перпендикуляру к плоскости DAOB. Причем в ту сторону, откуда кратчайший поворот вектора к направлению вектора представляется происходящим против хода часовой стрелки, т.е. направление векторного произведения х совпадает с направлением вектора . Таким образом, формула (2.11) полностью определяет модуль и направление момента силы .
|
из
5.00
|
Обсуждение в статье: Зависимость между моментами силы относительно точки и оси , проходящей через эту точку |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы