 |
Главная |


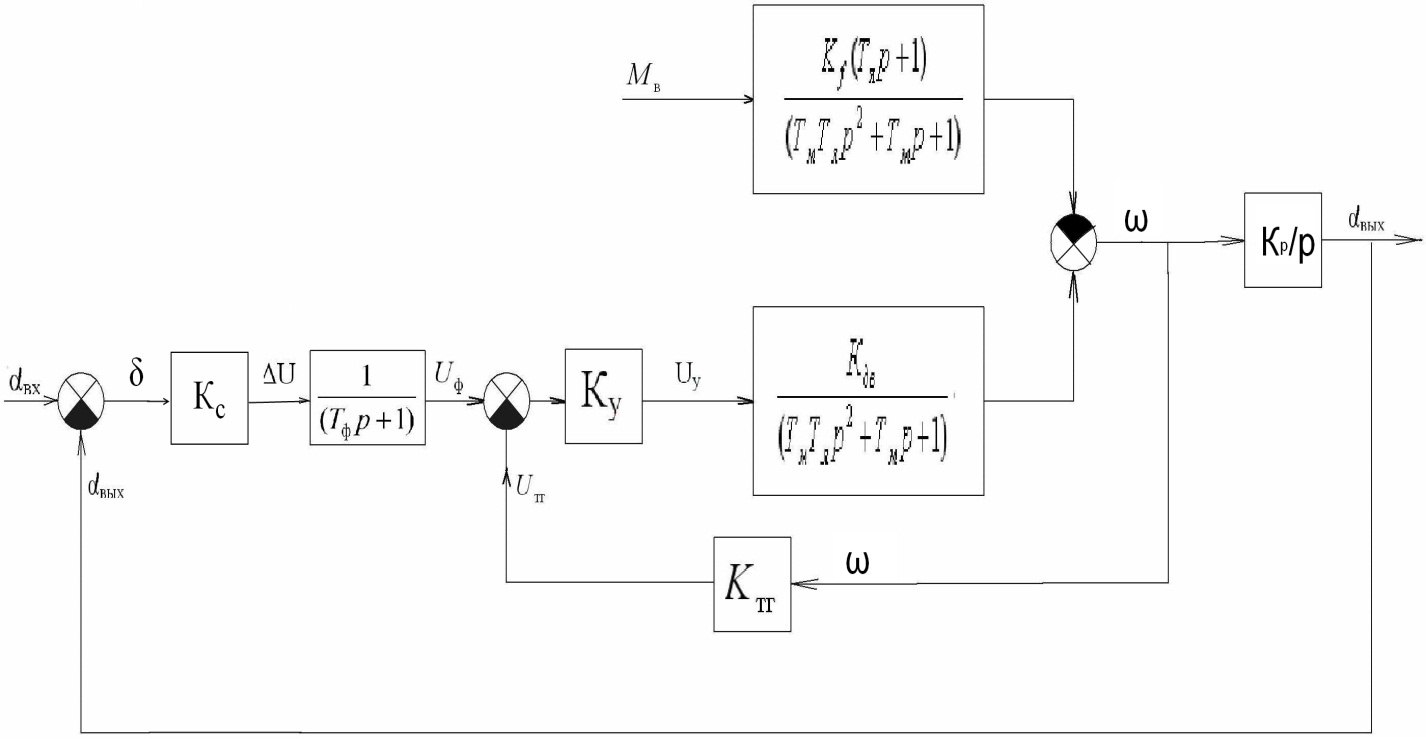
Построение структурной схемы с указанием передаточной функции звеньев
|
из
5.00
|
Укажем передаточные функции для каждого из звеньев.
1) Сельсинная пара. Её передаточная функция:
W(p)=Ксд=ΔU/(αвх-αвых)
Уравнение:
ΔU=W(p)δ
Где δ – ошибка, равная разности углов поворота командной и исполнительной осей. ΔU- напряжение датчика рассогласования.
Фазовый детектор и фильтр.
передаточная функция:

Где, 
Уравнение: Uф=Wф(p)·ΔU (в передаточной форме)
Где Uф – напряжение после фильтра.
Элемент сравнения перед усилителем.

Где UТГ – напряжение с тахогенератора
Усилитель мощности.
Примем за безинерционное звено, тогда передаточная функция:
Wy(p)=Ky= 
Уравнение: Uу=Ку·Uy’
Где Кy коэффициент усилителя.
Управляемый объект
5.1) Передаточная функция по управляющему воздействию:

Где Тм - постоянная времени, Тя- постоянная времени якоря, Кдв- коэффициент двигателя(скоростной коэффициент пропорциональности)
5.2) Передаточная функция по возмущающему воздействию
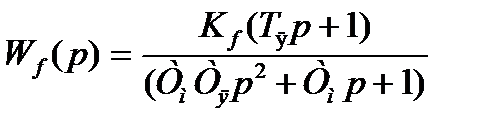
Редуктор
Передаточная функция

где КР – коэффициент редукции.
Тахогенератор
Является преобразующим элементом, преобразует вращение вала двигателя в электрический ток, пропорционально скорости его вращения. Считаем за безинерционное звено.
Передаточная функция:

Где КТГ – коэффициент тахогенератора.
Задающим параметром является входной угол αвх. Возмущающим воздействием является возмущающий момент на валу платформы МВ. Управляющим воздействием является момент на валу двигателя МДВ. Выходной величиной является выходной угол αвых.
Определение передаточной функции замкнутой системы.
Для регулируемой величины.
Для определения передаточных функций, преобразуем схему для исключения обратной связи:
 (3.1)
(3.1)
(3.2)
(3.3)
(3.4)
(3.5)
(3.6)
Запишем преобразованные передаточные функции для двигателя.


(3.7)
Где 


(3.8)
где 
зарисуем измененную структурную схему.

Обозначим


вывод передаточных функций системы:
запишем уравнения для системы

(3.9)
(3.10)
преобразуем уравнение (3.10)

(3.11)
(3.12)
Подставив (3.9) в (3.12), получим:

(3.13)
Передаточные функции системы для регулируемой величины:
- По команде:

(3.14)
- По возмущению:

(3.15)
Подставим в (3.14) и (3.15), выражения передаточных функций:

Преобразуя, получим:

(3.16)
где, K’=KpKcдK’п
- Вывод передаточной функции выходного угла по возмущению:

Преобразуя, получим:

(3.17)
Для рассогласования.
Используем уравнения (3.9-3.12)
 (3.18)
(3.18)
(3.19)

(3.20)
(3.21)
- По команде

(3.22)
- По возмущению

(3.23)
Подставим в (3.22) и (3.23) передаточные функции звеньев.
- Вывод передаточной функции рассогласования по команде:

Преобразуя, получим:

(3.24)
- Вывод передаточной функции рассогласования по возмущению:

Преобразуя, получим:

(3.25)
Запишем полученные передаточные функции:

| 
|

| 
|
 
| 
|

| 
|
,где  ,
, 
Запишем значения известных коэффициентов:
| KP | Kcд | Ктг | Кдв | Kf |
| 0.02 | 10 В/рад | 0.382 В·с/рад | 3.25 рад/В·с | 271.767 рад/Н·м·с |
Определение коэффициента усиления системы и коэффициента усиления электронного усилителя по заданным условиям точности в установившемся режиме (по статической и скоростной ошибкам).
При движении с постоянной скоростью величину установившейся ошибки можно определить по формуле
 (4.1)
(4.1)
Здесь α(t) − входной сигнал.

Приведенный к валу двигателя момент нагрузки постоянный, поэтому  .
.
Рассчитаем коэффициенты 




Теперь подберем усилитель из заданных условий точности


Так как по условию точности по динамической ошибки Ky<0, то это значит, что система с местной положительной обратной связи, но так как положительная обратная связь делает систему нестабильной, прибегнем к изменению САУ, добавим безинерционное усилительное звено, Ку1 разместим до сумматора с напряжением с тахогенератора. А второй с коэффициентом усиления Ку , останется не прежнем месте. Тогда будем иметь следующую структурную схему:
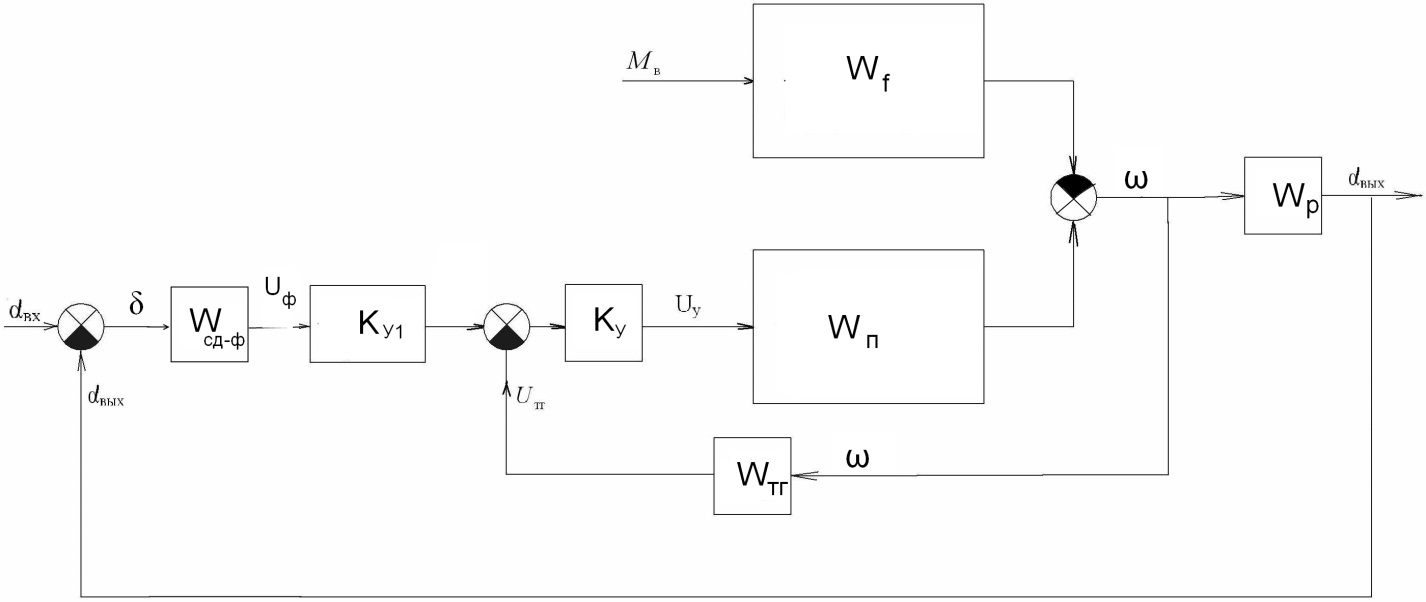
Тогда перепишем передаточные функции системы:

и

Задавшись коэффициентом Ку, решая систему неравенств, найдем Ку1. Выберем в первом приближении Ку произвольно. Пусть  , тогда
, тогда


Принимаем Ку1 = 640.
Теперь коэффициент усиления разомкнутой системы равен

5)Сравнение величины рассогласования для регулируемой и нерегулируемой систем в случае приложения к нагрузке возмущающего момента  . Сравнение рассогласования для регулируемой и нерегулируемой систем при подаче на вход команда с постоянной скоростью 1 рад/с
. Сравнение рассогласования для регулируемой и нерегулируемой систем при подаче на вход команда с постоянной скоростью 1 рад/с
Сравним σст для регулируемой и нерегулируемой систем в случае, когда αвх = 0 и при действии на нагрузку возмущающего момента .
Найдем σст для регулируемой системы

Найдем выражение для σст в системе без обратной связи. Обозначим
 (5.1)
(5.1)
Тогда


Обозначим


Запишем передаточные функции разомкнутой систем для установившегося режима(p=0)

 при
при  .
.
В установившемся состоянии при заданном воздействии α(t) = 1,рад/с и при постоянном значении возмущающего воздействия установившаяся ошибка будет слагаться из статической и добавочной скоростной.
Найдем σск для регулируемой системы


Очевидно, что  при .
при .
Таким образом, для разомкнутой системы, в отличие от замкнутой, нельзя подобрать усилители, чтобы ошибка системы удовлетворяла заданным условиям точности.
|
из
5.00
|
Обсуждение в статье: Построение структурной схемы с указанием передаточной функции звеньев |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы