 |
Главная |


Импульсная переходная функция
|
из
5.00
|
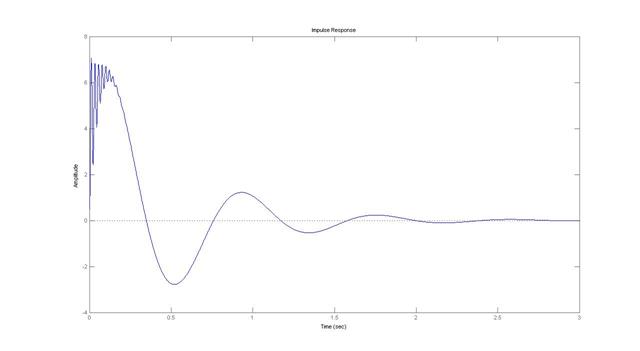
Переходная функция

Апериодическая функция - т.к. 1 максимум.
Показатели качества переходного процесса:
 - время, когда впервые достигается
- время, когда впервые достигается 
 -время достижения максимума.
-время достижения максимума.



 3%
3%
Перерегулирование:

Частота колебаний:

n – число колебаний за время регулирования =2.
4. Нахождение аналитическое выражения импульсной переходной функции. Выделение составляющей найденной функции, соответствующей доминирующим полюсам, сравнение графиков функции и указанной её составляющей:

С помощью программы MathLab найдем аналитическое выражение импульсной
функции системы. При использовании команды:
>>[R,P,K]=residue(num,den),
где результатом выполнения этой команды будут векторы-столбцы вычетов R и полюсов Р.
Так как у нас комплексно-сопряженные полюса и вычеты, то такую пару слагаемых объединим:
Общая формула:

R =
-1.830107623872943e+000 +2.329754097485704e-001i
-1.830107623872943e+000 -2.329754097485704e-001i
-1.141755548076448e-001
1.887195401276764e+000 -3.611595606213505e+000i
1.887195401276764e+000 +3.611595606213505e+000i
P =
-2.223584984572268e+001 +2.845621915179571e+002i
-2.223584984572268e+001 -2.845621915179571e+002i
-3.149957154695964e+001
-2.001568475487227e+000 +7.636819883138676e+000i
-2.001568475487227e+000 -7.636819883138676e+000i
K =
[]
1) 
Где оригинал:

2) 
Оригинал: 
3) 
Где оригинал:

Импульсная переходная функция:

Выделим составляющую найденной функции, соответствующую доминирующим полюсам:
И определим ее график:

Код программы:
>>T=0:0.001:3
>> y1=3.78*exp(-2*T).*cos(7.63*T)-7.22*exp(-2*T).*sin(7.63*T)
>> ys=3.66*exp(-22.4*T).*cos(284.56*T)-0.48*exp(-22.4*T).*sin(284.56*T)+0.228*exp(-31.49*T)+3.78*exp(-2*T).*cos(7.63*T)-7.22*exp(-2*T).*sin(7.63*T)
>>plot(T,y1,T,ys),grid

5. Установление заключения об устойчивости замкнутой системы, определение запасов устойчивости:

По критерию Найквиста, для асимптотической устойчивости замкнутой системы необходимо и достаточно, чтобы ЛФЧХ разомкнутой системы в области частот, где ЛАЧХ положительна, принимала значение -180˚ четное число раз или не принимала этого значения, следовательно, данная система устойчива, т.к. ЛФЧХ не принимала значение  ни разу в области частот, где ЛАЧХ положительна.
ни разу в области частот, где ЛАЧХ положительна.
Используя функцию
>>u=w/(1+wh)
>>[g f wg wf]=margin(u)
в пакете Matlab определим:
-запас устойчивости по фазе f и соответствующая частота wf:
f= 2.823307323792499e+001, wf = 8.346297244453146e+000
-запас устойчивости по амплитуде g и соответствующая частота wg:
g = 1.297454986821580e+001
20*lg(g) =20*lg(1.297454986821580e+001)=22,2688,wg = 2.843965094048663e+002
Запас устойчивости по фазе определяется на частоте, при которой ЛАЧХ принимает значение 0.
Запас устойчивости по амплитуде определяется на частоте, при которой ФЧХ принимает значение -180˚.
Построим ЛАЧХ и ЛФЧХ разомкнутой системы, используя Матлаб bode(u): 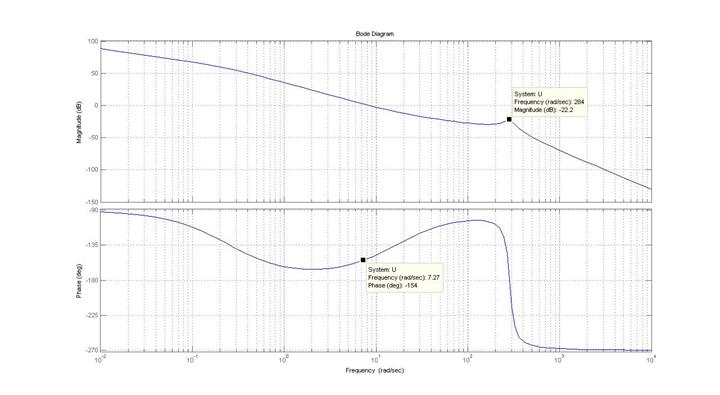
6 Построение логарифмической амплитудно-частотную характеристики замкнутой системы, определение полосы пропускания системы, резонансной частоты, показателя колебательности:

Используя программу Матлаб:
>>s=tf('s');
>>w=(250*(0.1*s+1))/(s*(0.75*s+1)*(0.000441*s^2+0.0105*s+1))
>>h=(0.14*s^2)/(0.26*s+1)
>>u=w/(1+w*h)
>>ui=1/((1/w)+h+1)
>>bode(ui)

Показатель колебательности:

Резонансная частота:
 .
.
 -
-
Полоса пропускания:
 .
.
 .
.
Частота среза:
 .
.
 .
.
Время регулирования:

7. Найти уравнения состояния и выхода замкнутой системы. Проверить свойства управляемости и наблюдаемости этих вариантов:

Код программы:
>>A=[159948816.4 15438259.76 2902751.12 83237 79.97 1;
15438259.76 2902751.12 83237 79.97 1 0;
2902751.12 83237 79.97 1 0 0;
83237 79.97 1 0 0 0;
79.97 1 0 0 0 0;
1 0 0 0 0 0]
>>B=[159948816.4; 14798464.49; 299936.02;0;0;0]
>>C=inv(A)*B
Составим систему для нахождения коэффициентов 

C =
1.848625916748493e-012
-2.690774005112822e-012
5.690658141686619e-009
2.999360199997667e+005
-9.187419029849567e+006
-2.407110778052028e+010
или
d=1.848625916748493e-012; b1=-2.690774005112822e-012;
b2=5.690658141686619e-009; b3=2.999360199997667e+005;
b4=-9.187419029849567e+006; b5=-2.407110778052028e+010;
Уравнение состояния и выхода имеют вид:
 или для нашей системы:
или для нашей системы:
Наблюдаемость и управляемость:
Код программы:
>>K=[B, A*B, A^2*B, A^3*B, A^4*B]
>>rank(K)
ans = 2
>>G=[C;A*C;A^2*C;A^3*C;A^4*C]
>>rank(G)
ans = 5
Если ранг K=n , то система вполне управляемая;
Если ранг G=n , то система вполне наблюдаема,
В нашем случае эти условия не выполняются, следовательно наша система наблюдаемая и неуправляемая.
|
из
5.00
|
Обсуждение в статье: Импульсная переходная функция |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы