 |
Главная |


РАСЧЁТ ЗОНЫ ОБСЛУЖИВАНИЯ МАНИПУЛЯТЬРА
|
из
5.00
|
Для определения величины результирующего радиуса-вектора крайней точки многозвенного механизма, необходимо, составить соответствующее матричное уравнение, характеризующее положение крайней точки, относительно базовой системы координат. Для этого мы воспользуемся тензорно-матричным методом.
Для тензорно-матричного метода нет необходимости изменения систем координат звеньев. Достаточно записать соответствующие матрицы поворота и переноса для базовой системы координат совмещенной с системами координат соответствующих звеньев.
Рассматривать положение звеньев мы будем в трехмерной декартовой системе координат, являющейся правосторонней. Для этого примем соглашение, в соответствии с которым будем считать положительными такие повороты, при которых (если смотреть с конца полуоси в направлении начала координат) поворот на 90° против часовой стрелки будет переводить одну полуось в другую. На основе этого соглашения построим следующую таблицу (таблица 2), которой можно использовать как для правых, так и для левых систем координат:
Таблица 2. Направление поворота системы координат
| Если ось вращения | Положительным будет направление поворота |
| X | От y к z |
| Y | От z к x |
| Z | От x к y |
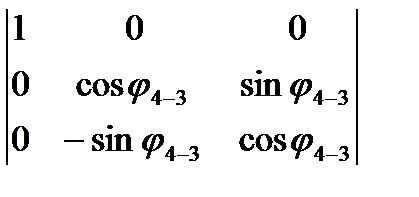
Матрицы поворота М определяют поворот системы координат соответствующего звена для корреляции относительно предыдущего по порядку. В зависимости от поворота вокруг соответствующей оси выделяется три стандартных типа матриц поворота. Повороты вокруг осей Х, Y и Z определяются соответственно матрицами:
 , (2)
, (2)
 , (3)
, (3)
 . (4)
. (4)
Подставляя значения углов поворота относительно соответствующих осей, определяем матрицы поворота.
В сочетании с матрицами поворота, учитываются так называемые матрицы переноса L, по факту являющиеся векторами. Они определяют линейные смещения систем координат звеньев друг относительно друга. В общем виде, матрица L имеет следующий вид:
 . (5)
. (5)
Положение схвата манипулятора, описываемое радиусом вектором
 (6)
(6)
определяется векторным уравнением, сочетающим комбинацию длин векторов переноса  с перемещениями звеньев
с перемещениями звеньев  и матриц переноса
и матриц переноса  . Построение уравнения начинается с крайнего звена и по порядку, вплоть до начального.
. Построение уравнения начинается с крайнего звена и по порядку, вплоть до начального.
Воспользовавшись уравнениями (2),(3),(4) построим матрицы поворота звеньев:

 (7)
(7)
Воспользовавшись уравнениями (5),(6) построим векторы переноса и векторы перемещениями звеньев .

 (8)
(8)
Выражение для радиус-векотра точки выходного звена в соответствии с правилами построения принимает следующий вид:
 (9)
(9)

 *
*  =
= 



 =
=  ;
;
 )=
)= 
 =
=
 ;
;

 +
+ 
 =
=  =
= 
при расчёте используем следующие данные  ;
;
Подставляя различные углы и перемещений звена 4 в программу, получим экстремальные точки, которые описывают зону обслуживания, и занесём координаты точек в таблицу 2.
Таблица 2 Экстремальные точки зоны обслуживания.
| № | R12,м | R34,м | φ21, град | φ43, град | X0 , м | Y0 , м | Z0 ,м |
| -1,27953 | |||||||
| -346,489 | -0,23973 | 0,23973 | |||||
| -0,99584 | |||||||
| -346,205 | -0,23973 | 0,23973 | |||||
| -0,25 | |||||||
| -0,25 | 0,297889 | 0,23973 | |||||
| -1,25 | |||||||
| -1,25 | 0,297889 | 0,23973 | |||||
| 0,720474 | |||||||
| -344,489 | -0,23973 | 0,23973 | |||||
| 1,004165 | |||||||
| -344,205 | -0,23973 | 0,23973 | |||||
| -2,25 | |||||||
| -2,25 | 0,297889 | 0,23973 | |||||
| -2,25 | |||||||
| -2,25 | 0,297889 | 0,23973 |
Используя данные таблицы 2, построим зону обслуживания манипулятора, которая представлена на рисунке 2

Рисунок 2 – Зона обслуживания манипулятора.
|
из
5.00
|
Обсуждение в статье: РАСЧЁТ ЗОНЫ ОБСЛУЖИВАНИЯ МАНИПУЛЯТЬРА |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы