 |
Главная |


Графики при скорости 10 рад/сек и длине лап 70мм
|
из
5.00
|

Рис. 27. Графики перемещения точки  :
:  перемещение по у,
перемещение по у,
 перемещение по х.
перемещение по х.

Рис. 28. Графики перемещения точки  : перемещение по у,
: перемещение по у,
перемещение по х.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |

Рис. 29. Графики перемещения точки  : перемещение по х, перемещение по у.
: перемещение по х, перемещение по у.
Графики при скорости 5 рад/сек, и длиной лап 70 мм.
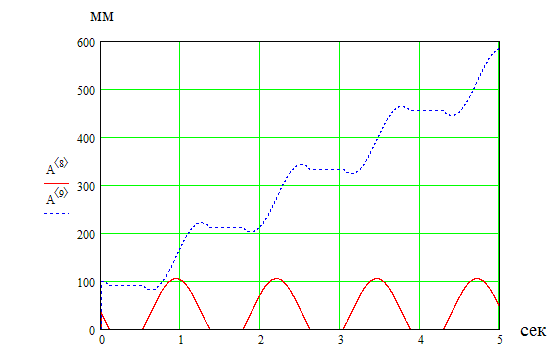
Рис. 30. Графики перемещения точки : перемещение по у,
перемещение по х.
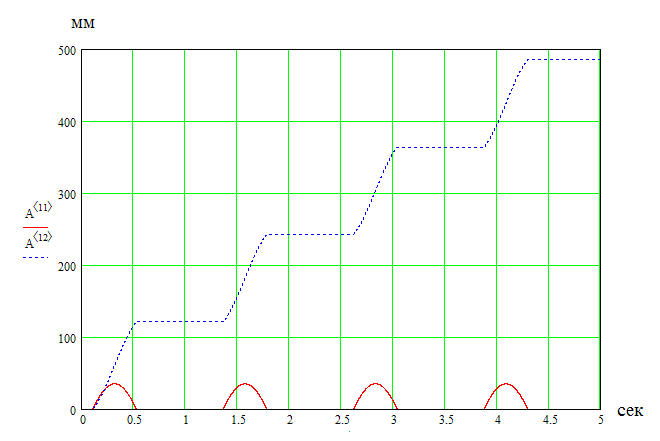
Рис. 31. Графики перемещения точки : перемещение по у,
перемещение по х.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |

Рис. 32. Графики перемещения точки : перемещение по х, перемещение по у.
Графики при скорости 15 рад/сек и длине лап 70 мм.

Рис. 33. Графики перемещения точки : перемещение по у,
перемещение по х.

Рис. 34. Графики перемещения точки : перемещение по у,
перемещение по х.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |
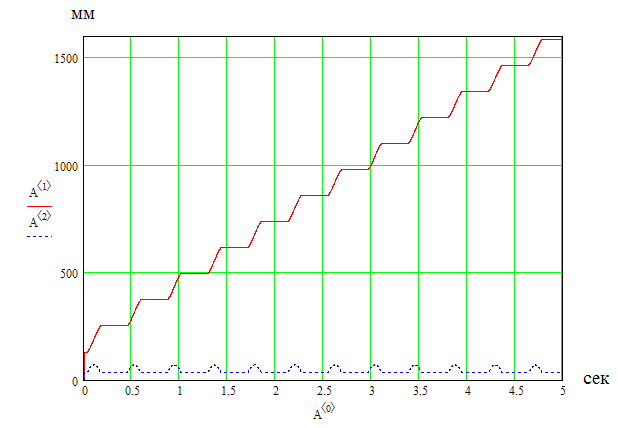
Рис. 35. Графики перемещения точки : перемещение по х, перемещение по у.
Графики при скорости 10 рад/сек и длине лап 100 мм.
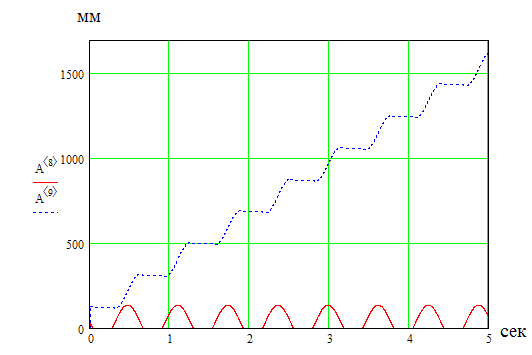
Рис. 36. Графики перемещения точки : перемещение по у,
перемещение по х.

Рис. 37. Графики перемещения точки : перемещение по у,
перемещение по х.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |
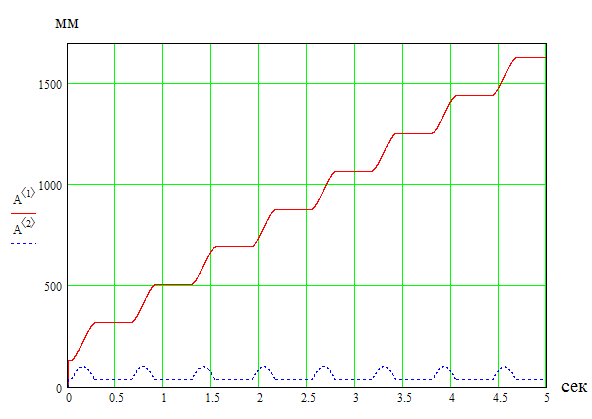
Рис. 38. Графики перемещения точки : перемещение по х, перемещение по у.
Графики при скорости 5 рад/сек и длине лап 100 мм.
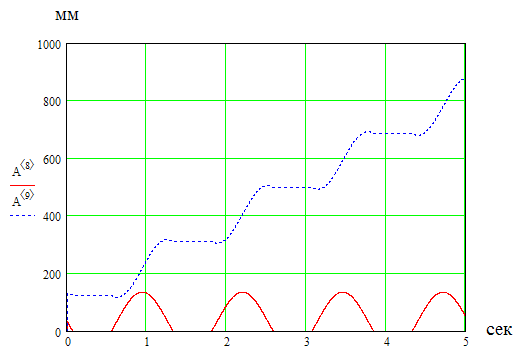
Рис. 39. Графики перемещения точки : перемещение по у,
перемещение по х.
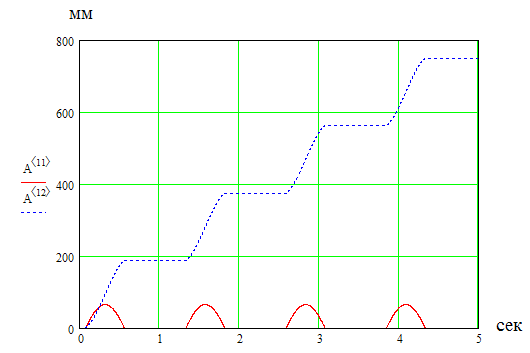
Рис. 40. Графики перемещения точки : перемещение по у,
перемещение по х.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |
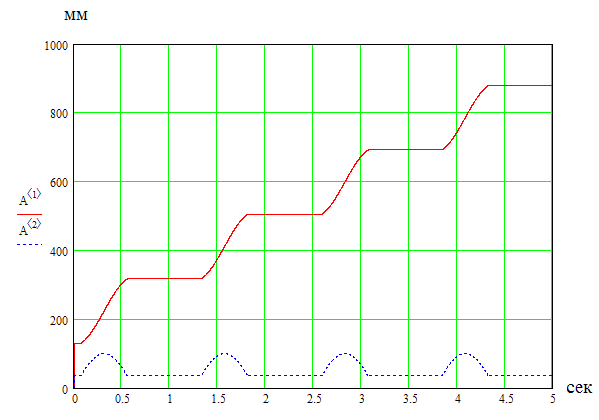
Рис. 41. Графики перемещения точки : перемещение по х, перемещение по у.
Графики при скорости 15 рад/сек и длине лап 100 мм.
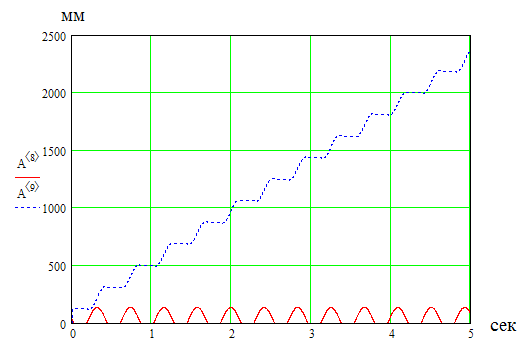
Рис. 42. Графики перемещения точки : перемещение по у,
перемещение по х.
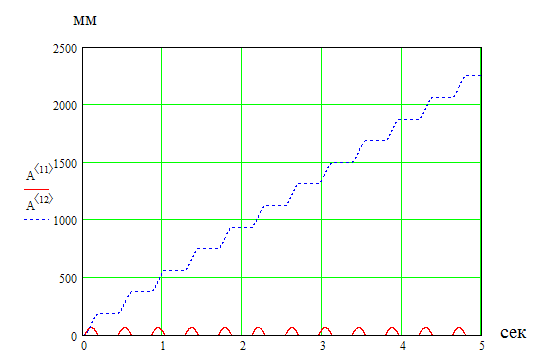
Рис. 43. Графики перемещения точки : перемещение по у,
перемещение по х.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |
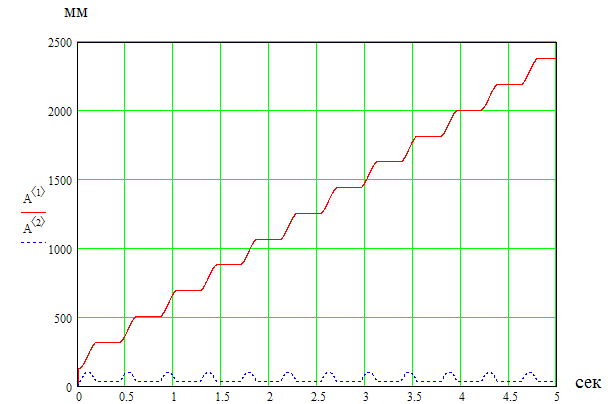
Рис. 44. Графики перемещения точки : перемещение по х,
перемещение по у.
Графики зависимости перемещения корпуса
Робота от изменения длины лапы робота и её угловой скорости.

Рис. 45. Графики зависимости перемещения корпуса робота
от угловой скорости лапы робота.
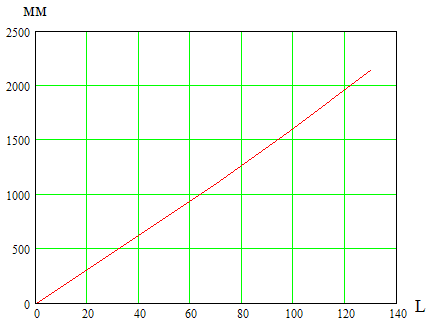
Рис. 46. Графики зависимости перемещения корпуса робота
от длины лапы робота.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КП–220401–12. РШ–00.00.00.00. ПЗ ----- |
 (t),
(t),  (t),
(t),  (t),
(t),  (t),
(t),  (t),
(t),  (t). По полученным данным были построены графики:
(t). По полученным данным были построены графики:
1.По графику зависимости перемещения корпуса робота от угловой скорости лапы робота можно увидеть, что при увеличении угловой скорости лапы робота увеличивается перемещение робота, график имеет небольшую выпуклость.
2.По графику зависимостиперемещения корпуса робота от длины лапы робота можно увидеть, что приувеличении длины лапы робота увеличивается перемещение робота, график имеет небольшой прогиб.
|
из
5.00
|
Обсуждение в статье: Графики при скорости 10 рад/сек и длине лап 70мм |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы