 |
Главная |


ТЕМА 5. РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПАРАЛЛЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
|
из
5.00
|
5. 1. Характеристики двигателей постоянного тока
5.1.1. Назначение и области применения двигателей постоянного тока
Машины постоянного тока используются в промышленности так же широко, как и машины переменного тока. Несмотря на то, что стоимость их выше, чем машин переменного тока, они обладают лучшими эксплуата- ционными характеристиками в отношении регулирования частоты враще- ния, пуска и допускают более высокие перегрузки. В основном машины постоянного тока используются в качестве двигателей. В связи с широким применением автоматизированного электропривода и применением тири- сторных преобразователей, позволяющих питать электродвигатели посто- янного тока регулируемым напряжением от сети переменного тока, эти двигатели наиболее удобны в эксплуатации. Номинальные мощности ма- шин постоянного тока составляют от долей ватт до 12 Мвт, а номинальные напряжения не превышают 1500 В. Частота вращения таких машин колеб-
лется в широких пределах – от нескольких оборотов до нескольких тысяч оборотов в минуту. Эти устройства используются для привода различных механизмов на транспорте (электровозы, тепловозы, поезда, электромоби- ли, на морских и речных судах), в черной металлургии (прокатные станы, транспортеры), станкостроении, в системах автоматического регулирова- ния и т. д. Основной конструктивной особенностью, отличающей машины постоянного тока, является наличие щеточно-коллекторного аппарата, ко- торый требует тщательного ухода в эксплуатации и снижает надежность работы машины.
Основные серии машин постоянного тока общего назначения — 2П и 4П. Помимо этих серий выпускаются серии краново-металлургических двигателей и серии специального назначения. Серия 2П включает двигате- ли мощностью от 0,13 до 200 кВт с высотой оси вращения 90-135 мм. Для замены серии П габаритов 12-26 выпускается серия П2. Двигатели серий 2П и 4П выпускаются на напряжение 110, 220, 340 и 440 В, на номиналь- ные частоты вращения 750, 1000, 1500, 2200 и 3000 об/мин. Машины вы- полняются в защищенном исполнении с самовентиляцией и независимой вентиляцией от постороннего вентилятора; в закрытом исполнении – с ес- тественным охлаждением и наружным обдувом от постороннего вентилятора.
Двигатели серии 2П имеют независимое возбуждение и компенсаци- онную обмотку, обеспечивающую большие кратковременные перегрузки и широкий диапазон изменения частоты вращения. А общее число модифи- каций двигателей постоянного тока с каждым годом возрастает. Перечис- лим лишь некоторые из них. Для металлургических, крановых, экскава- торных и других приводов выпускаются двигатели серии Д. Они имеют мощности от 2,5 до 185 кВт, напряжением 220 и 440 В, номинальные час- тоты вращения 400–1440 об/мин. Эти двигатели обладают малым момен- том инерции и обеспечивают регулирование частоты вращения в широких пределах. Для электроприводов шагающих экскаваторов выпускаются
двигатели типа МПВЭ-450-29; для привода механизма подъема и тяги – двигатель типа МПЭ-1000-630 УХЛЗ; для буровых установок – двигатель типа ДЭВ-808; для морских буровых установок в морском взрывозащи- щенном исполнении – двигатель типа ММП-1000-1000МЗ; серия ПЛ включает двигатели независимого возбуждения мощностью от 30 до 600 Вт, напряжением 110 и 220 В и частотой вращения 1400 и 2700 об/мин; микродвигатели постоянного тока с постоянными магнитами имеют серию ДПМ от долей ватта до десятков ватт, напряжением 12,14 и 27 В; мало- инерционные исполнительные микродвигатели постоянного тока имеют якорь, выполненный в виде полого цилиндра или диска, и относятся к се- рии ДПР [6].
5.1.2. Классификация двигателей постоянного тока
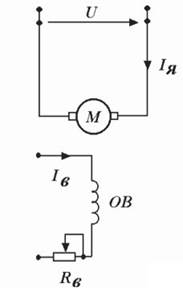
Двигатели постоянного тока классифицируются по способу включе- ния обмотки возбуждения: независимого возбуждения, параллельного (шунтового) возбуждения, последовательного (сериесного) возбуждения и смешанного (компаундного) возбуждения [5, 6]. Принципиальные схемы этих двигателей представлены на рис. 5.1.
В машинах с параллельным возбуждением обмотка возбуждения
присоединяется параллельно к зажимам якоря. Ток возбуждения I в
при
нормальных условиях работы составляет по отношению к току якоря от 5 % у машин малой мощности, до 1 % у машин большой мощности. Так как об- мотка возбуждения включается непосредственно под напряжение U , а ее ток во много раз меньше тока якоря, то сопротивление обмотки возбужде-
ния
Rв = U / Iв
должно быть относительно велико. Для регулирования тока
в обмотке возбуждения последовательно с ней включается реостат – так называемый шунтовой регулятор. Для машин параллельного возбуждения характерным является относительное постоянство основного магнитного потока и его малая зависимость от нагрузки машины.
а б
 |  | ||
в г
Рис. 5.1. Схемы замещения двигателей постоянного тока с различным способом возбуждения: а – с независимым; б – с параллельным; в – последовательным;
г – смешанным
В машинах последовательного возбуждения весь ток якоря проходит через обмотку возбуждения. Поэтому она выполняется проводом относи- тельно большого сечения и имеет небольшое сопротивление. В этих ма-
шинах магнитный поток изменяется в широких пределах в зависимости от изменения нагрузки.
Машины смешанного возбуждения имеют две обмотки последова- тельно соединенную с якорем и параллельную. В зависимости от назначе- ния такой машины одна из обмоток является основной, имеющей относи- тельно большой полный ток, а вторая служит лишь для относительно сла- бого дополнительного воздействия на главное поле машины. Таким обра- зом, машина смешанного возбуждения может быть по своим характери- стикам в основном машиной параллельного возбуждения с небольшой по- следовательной обмоткой или же машиной последовательного возбужде- ния с небольшой параллельной обмоткой (например, двигатель смешанно- го возбуждения с мягкой механической характеристикой). В случае сме- шанного возбуждения обмотки машины могут иметь согласное соединение, если оба магнитных потока от двух обмоток складываются, или встречное соединение, если их магнитные потоки вычитаются.
В машинах независимого возбуждения ток возбуждения не зависит от напряжения на зажимах якоря машины, поскольку обмотка возбужде- ния получает ток от независимого источника возбуждения.
По ряду свойств машины с независимым возбуждением весьма мало отличаются от машин с параллельным возбуждением. К преимуществам машин с независимым возбуждением относится возможность регулирова- ния частоты вращения изменением питающего напряжения при фиксиро- ванном токе возбуждения.
Ток якоря I я
в двигателях независимого и последовательного возбу-
ждения равен току I , потребляемому двигателем из сети, а в двигателях
параллельного и смешанного возбуждения кающий в обмотке возбуждения).
I я = I - I в
( I в
– ток, проте-
5.1.3. Паспортные данные двигателей постоянного тока
Номинальными данными для двигателей постоянного тока являются следующие:
1. За номинальную мощность двигателя принимают механическую
мощность на валу
Pном = P2 ,
[кВт]. Эта мощность обычно указывается на
щитке, закрепленном на корпусе машины.
2. Номинальное напряжение
Uном , [В].
3. Номинальная частота вращения
nном ,
[об/мин].
4. Номинальный коэффициент полезного действия
ηном .
В справочнике по электрическим машинам также указываются:
5. Кратность пускового тока (отношение пускового тока к номиналь-
ному)
K I = Iп / Iном . У серийных двигателей малой мощности кратность
пускового тока допускается в пределах 4–6 при прямом пуске. У двигате- лей большой мощности она ограничена до 1,4–2,5. В последнем случае для ограничения пускового тока используется пусковой реостат.
6. Кратность пускового момента (отношение пускового момента к
номинальному)
K М = М п / M ном .
5.1.4. Механическая характеристика двигателя постоянного тока с параллельным возбуждением
У двигателей постоянного тока приложенное к якорю напряжение уравновешивается наведенной в обмотке якоря электродвижущей силой ( Eпр ) и падением напряжения в цепи якоря
U = Eпр + Iя Rя .
Это соотношение называют уравнением электрического состояния обмот- ки якоря двигателя постоянного тока. Падение напряжения в цепи якоря
I я R я
относительно мало. В номинальном режиме, при
Iя = Iя,ном ,
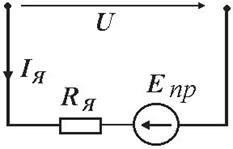
Рис. 5.2. Схема замещения электрической цепи двигателя постоянного тока
оно составляет 2–5 % номинального напряжения. Характерным условием работы машины постоянного тока в двигательном режиме является нера- венство U > Eпр . В связи с этим соотношение, определяющее ток в якоре, выглядит следующим образом
 I = U - Eпр .
I = U - Eпр .
я R
я
Для последующего анализа данные факты удобно представить на схеме замещения электрической цепи двигателя постоянного тока (рис. 5.2.).
Электромагнитный момент, развиваемый двигателем, определяется взаимодействием тока обмотки якоря и магнитного поля главных полюсов. Количественное соотношение зависит от конструкции конкретного двига- теля и определяется как [5, 6, 7]
М эм = См IяФ,
где См
– конструктивная постоянная момента,
I я – ток якоря, Ф – основ-
ной магнитный поток, создаваемый обмоткой возбуждения, расположен- ной на главных полюсах. ЭДС, создаваемая в обмотке якоря и уравнове- шивающая приложенное напряжение, зависит от скорости изменения маг- нитного поля через обмотку якоря, амплитуды магнитного потока и конст- рукции двигателя, в частности
E = CЕ · Ф · п ,
где СЕ
– конструктивная постоянная ЭДС, Ф – магнитный поток, созда-
ваемый обмоткой возбуждения, расположенной на главных полюсах, n – частота вращения якоря, измеряемая в оборотах в минуту.
Важнейшей характеристикой двигателя постоянного тока является механическая – зависимость частоты вращения n от момента сопротивле-
ния на валу M С при U = const, Iв = const . Момент сопротивления создается
исполнительным механизмом, для привода которого и выбирается двига- тель постоянного тока. Устойчивая работа двигателя возможна только в
том случае, если выполняется равенство
M эм = M С . Механическая харак-
теристика показывает влияние механической нагрузки на валу двигателя на частоту вращения, что особенно важно знать при выборе и эксплуата- ции двигателя.
Уравнение механической характеристики можно получить, исполь- зуя выражение для ЭДС обмотки якоря, уравнение электрического состоя- ния обмотки якоря и уравнение момента. Оно выглядит следующим обра- зом
или
n = U - Iя Rя ,
 Се · Ф
Се · Ф

 n = U -
n = U -
C · Ф С
Rя М .
· C Ф2
e e м
Механическая характеристика двигателя постоянного тока представ- ляет собой прямую (рис. 5.3.). В отсутствии нагрузки (при холостом ходе), когда момент сопротивления со стороны исполнительного механизма ра- вен нулю ( M С = 0) , частота вращения якоря зависит от уровня приложен- ного напряжения, магнитного потока и конструкции двигателя. Эта часто- та называется частотой вращения идеального холостого хода:

Рис. 5.3. Естественная механическая характеристика двигателя постоянного тока с параллельным возбуждением
nхх
= U .
 C · Ф
C · Ф
е
При заданных номинальных параметрах двигателя Uном ,
Iном ,
nном и
неизменном магнитном потоке (токе возбуждения) частота холостого хода может быть определена как
n = n ·
Uном .

хх ном
Uном - Iя,ном Rя
Механическая характеристика имеет вид прямой в соответствии с
уравнением
n = nхх - в · М , где
в = Rя / CeФ . Так как у двигателей постоян-
ного тока сопротивление цепи якоря мало (обычно оно составляет от 0,02 до 1,1 Ом), то с увеличением нагрузки на валу частота вращения n изме- няется незначительно, то есть является “жесткой”. Механическая характе- ристика, снятая при номинальных данных двигателя, называется естест- венной механической характеристикой. Она представлена на рис. 5.3.
Механическую характеристику можно построить по двум точкам, в
частности ( n = nхх ; М
= 0 ) и ( n = nном ; М
= М ном ). Любые другие механиче-
ские характеристики, построенные для тех режимов, в которых один из па- раметров, входящих в уравнение естественной механической характери- стики не соответствует номинальному режиму, называются искусствен- ными.
Ток, потребляемый двигателем из сети, растет прямо пропорцио- нально моменту сопротивления со стороны нагрузки при Ф = сonst . То
есть,
I я ~ М . Изменение нагрузки со стороны исполнительного механизма
ведет к изменению тока якоря в пропорции

 М ном = Iя,ном .
М ном = Iя,ном .
М Iя
5.1.5. Проблема пуска двигателя постоянного тока с параллельным возбуждением
Увеличение тока, потребляемого двигателем, возможно не только при увеличении нагрузки. Одной из главных проблем при эксплуатации двигателей постоянного тока является проблема пуска [5, 6]. При прямом пуске цепь якоря включается сразу на полное напряжение. Так как в мо- мент пуска якорь неподвижен ( n = 0 ), то противо-ЭДС отсутствует и пус- ковой ток резко возрастает
Iя,п
= U ,
 Rя
Rя
а при малых значениях Rя
пусковой ток превышает номинальный в 50-100
раз, что недопустимо как для сети, так и для самого двигателя. Такой спо- соб пуска применяется только для двигателей малой мощности, где Iя,п Š (4 - 6)Iном . Двигатели средней и большой мощности запускают при включении добавочного сопротивления (пускового реостата) в цепь об-
мотки якоря. Пусковой ток в этом случае равен:

|
Сопротивление
Rп =
U
Iя,п
я п
-  R я выбирают таким, чтобы в момент пуска,
R я выбирают таким, чтобы в момент пуска,
когда противо-ЭДС равна нулю, ток якоря не превосходил значений 1,4– 2,5 Iном . По мере разгона якоря возрастает противо-ЭДС ( Eпр = CenФ ), а со- противление реостата выводится.
К пуску двигателя предъявляются два основных требования:
– обеспечить необходимый для трогания с места и разгона якоря вращающий момент;
– не допустить при пуске протекания через обмотку якоря чрезмер- но большого тока, опасного для двигателя.
Практически возможны три способа пуска: прямой пуск, пуск при включении реостата в цепь якоря и пуск при пониженном напряжении в цепи якоря. Последний способ пуска возможен при питании двигателя от отдельного источника (генератора, выпрямителя) с регулируемым напря- жением, то есть лишь для двигателей с независимым возбуждением. Огра- ничение пускового тока и плавный разгон двигателя обеспечивается по- степенным повышением напряжения от нуля до требуемого значения. Это находит применение в системах управления и регулирования мощных дви- гателей постоянного тока.
5.1.6. Способы регулирования частоты вращения якоря двигателя постоянного тока с параллельным возбуждением
В соответствии с уравнением механической характеристики регули- рование частоты вращения можно осуществлять тремя способами [5, 6]:
– изменением магнитного потока (полюсное регулирование);
– введением добавочного сопротивления в цепь обмотки якоря (рео- статное регулирование);
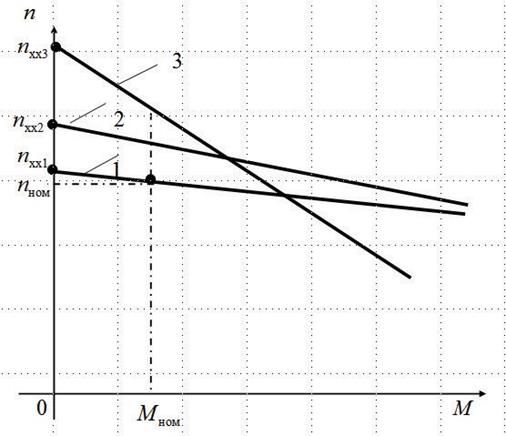
Рис. 5.4. Механические характеристики при полюсном регулировании ( Ф1 > Ф2 > Ф3 )
– изменением напряжения питания (якорное регулирование).
Первый способ регулирования наиболее распространен и осуществ- ляется посредством регулирования тока в обмотке возбуждения. Это про- исходит при варьировании сопротивления регулировочного резистора в контуре возбуждения. При этом механические характеристики имеют вид, представленных на рис. 5.4.
Таким способом можно регулировать частоту вращения в пределах 1:1,5; 1:2. Глубокое уменьшение потока недопустимо, так как при нагрузке поле, создаваемое обмоткой якоря (так называемая реакция якоря), будет “опрокидывать” поле возбуждения, что приведет к неустойчивой работе двигателя. Увеличение потока в обычных двигателях параллельного воз- буждения нецелесообразно, так как магнитная система двигателей насы-
щена (рис. 5.5.). Частота холостого хода и частота вращения якоря в этом случае определяются следующим образом:
 %
%
100
80
60
40
20
0
0 20 40 60 80 100 120 %
Рис. 5.5. Зависимость магнитного потока
от тока возбуждения в машинах постоянного тока
nх¢х = nхх,ном
· Фном ;
 Ф¢
Ф¢
n¢ = n ном
· U - Iя Rя
 Uном - Iя,ном Rя
Uном - Iя,ном Rя
· Фном .
 Ф¢
Ф¢
При этом увеличение тока возбуждения будет приводить к увеличе- нию потерь, а значит, и к уменьшению коэффициента полезного действия. При увеличении массы двигателя и принятия специальных мер можно уве- личить пределы частоты вращения в ненасыщенных двигателях до 1:5. Хо- тя этот способ обеспечивает сравнительно небольшие пределы регулиро- вания частоты вращения, он является экономичным и находит широкое применение, когда пределы изменения частоты вращения небольшие.
Второй способ – использование регулировочного реостата в цепи якоря – позволяет изменять частоту вращения в широких пределах, но этот способ неэкономичен, так как регулировочный реостат включается в сило- вую цепь и на нем выделяется тепло, пропорциональное квадрату тока на- грузки. Частота холостого хода при изменении сопротивления в цепи яко- ря не меняется, как и магнитный поток. Выражение для определения час-
тоты вращения (уравнение механической характеристики) выглядит сле- дующим образом:
n¢ = n - (Rя + Rp )· М ,
или
n¢ = n
· Uном - (Rя + Rp )Iя .

|
ном
Uном - Rя Iя,ном
Семейство механических характеристик при различных значениях сопротивления регулировочного реостата приведено на рис. 5.6.
Третий способ регулирования частоты вращения – якорное – приме- няется в основном для двигателей с независимым возбуждением. С одной стороны, необходимо обеспечить наличие регулируемого источника на- пряжения. С другой – к двигателям с параллельным возбуждением он не- применим, так как одновременно с током якоря будет изменяться и ток возбуждения, а следовательно, и магнитный поток. Каким образом изме- нится частота вращения в этом случае, заранее предсказать трудно.
 |
Рис. 5.6. Механические характеристики двигателя
постоянного тока параллельного возбуждения при реостатном регулировании
5.1.7. Потери мощности и КПД двигателя постоянного тока
Для определения энергетических характеристик двигателей необхо- димо определить потребляемую, отдаваемую мощности, а также суммар- ные потери. Мощность, подводимая к двигателю, – электрическая, опреде- ляемая подводимым к двигателю напряжением U и током внешней цепи I :
P1 = U · I .
Электромагнитная мощность –
Pэм = Епр · Iя .
Механическая мощность, вырабатываемая двигателем, обозначается
P2 (при обозначении номинальной мощности индекс «2» опускают). Вра-
щающий момент двигателя на валу определяется как
 М = 9,55 · P2 ,
М = 9,55 · P2 ,
n
где коэффициент 9,55 означает, что мощность вычисляется в ваттах, а ко- эффициент 9550 используется в уравнении, если мощность измеряется в киловаттах.
Разницу между электрической и механической мощностями опреде-
ляют как суммарные потери мощности – полезного действия определяют как
OP . Для двигателей коэффициент
 y = (P1 - OP) .
y = (P1 - OP) .
P1
Исходя из устройства и принципа работы, суммарные потери можно разделить на следующие группы: электрические ( OPэл ), магнитные ( OPмагн ), механические ( OPмех ) и добавочные ( OPдоб ).
Электрические потери зависят от режима работы двигателя и опре- деляются параметрами обмоток якоря и возбуждения
OP = R I 2 + R I 2 .
эл я я в в
Эти потери идут на нагрев обмоток.
Механические потери – это потери на трение на валу машины и тре- ние о вращающегося якоря о воздух. Магнитные потери – это потери в сердечнике якоря на вихревые токи и гистерезис. В насыщенном сердеч- нике эти потери не зависят от режима работы. Добавочные потери связаны с наличием в машинах постоянного тока щеточно-коллекторного аппарата и определяются равными одному проценту от номинальной мощности
( OPдоб = 0,01Рном ). Зависимость КПД двигателя от нагрузки представлена
на рис. 5.7.
5.2. ЗАДАНИЕ НА СЕМЕСТРОВУЮ РАБОТУ
Двигатель постоянного тока параллельного возбуждения имеет сле-
дующие данные: номинальная мощность
Pном ; напряжение питания Uном ;
номинальная частота вращения
nном ; сопротивление цепи якоря
Rя ; сопро-
тивление цепи возбуждения
Rв ; коэффициент полезного действия для
номинального режима
ηном . Значения перечисленных параметров приве-
 y
y

 0 Pном P 2
0 Pном P 2
Рис. 5.7. Зависимость КПД двигателя постоянного тока от нагрузки
дены в соответствии с номером варианта в таблицах 5.1. и 5.2. Требуется определить:
а) номинальный ток, потребляемый двигателем, номинальный ток якоря и ток возбуждения;
б) сопротивление пускового реостата
Rп , при котором начальный
пусковой ток в цепи якоря составлял 2,5 Iя,ном ;
в) начальный пусковой момент двигателя при заданной кратности пускового тока;
г) номинальный вращающий момент двигателя.
Построить в одной системе координат естественную механическую
характеристику и искусственную (при введении пускового реостата
Rп )
механическую характеристику. Определить диапазон изменения частоты вращения при номинальной нагрузке.
Определить частоту вращения двигателя при холостом ходе и номи- нальной нагрузке, если регулирование частоты вращения происходило за счет изменения сопротивления цепи возбуждения и магнитный поток имел
три значения:
Фном ; 0,5 Фном ; 0,8 Фном . Построить соответствующие этим
значениям механические характеристики в одной системе координат.
Таблица 5.1
| № вар | Pном , кВт | Uном , В | nном , об/мин | ηном , % | Rя , Ом | Rв , Ом |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1 | 22 | 220 | 500 | 78 | 0,122 | 33,4 |
| 2 | 26,5 | 440 | 600 | 81,5 | 0,38 | 34,7 |
| 3 | 28 | 220 | 600 | 82,2 | 0,082 | 33,4 |
| 4 | 30 | 220 | 750 | 84,3 | 0,05 | 33,4 |
| 5 | 37 | 220 | 750 | 83,2 | 0,051 | 33,4 |
| 6 | 45 | 220 | 1000 | 86 | 0,03 | 25,1 |
| 7 | 71 | 440 | 1500 | 88,5 | 0,065 | 31,2 |
| 8 | 75 | 220 | 1500 | 89,5 | 0,0128 | 23,5 |
| 9 | 45 | 220 | 500 | 86,9 | 0,032 | 28,6 |
| 10 | 55 | 220 | 600 | 88 | 0,022 | 27,9 |
| 11 | 75 | 220 | 750 | 88 | 0,013 | 21,1 |
| 12 | 118 | 440 | 1000 | 89 | 0,032 | 21 |
| 13 | 132 | 220 | 1060 | 90 | 0,0064 | 21,1 |
| 14 | 37 | 220 | 500 | 83,2 | 0,05 | 26,7 |
| 15 | 45 | 220 | 600 | 85,5 | 0,037 | 25,2 |
| 16 | 55 | 220 | 750 | 87,5 | 0,025 | 25,2 |
| 17 | 85 | 440 | 1000 | 88,7 | 0,05 | 19,7 |
| 18 | 13,2 | 220 | 1500 | 91 | 0,006 | 25,2 |
| 19 | 30 | 220 | 500 | 84,5 | 0,062 | 29 |
| 20 | 37 | 220 | 600 | 84,5 | 0,046 | 29 |
| 21 | 45 | 220 | 750 | 87 | 0,034 | 28 |
| 22 | 75 | 220 | 1000 | 88,5 | 0,016 | 22,8 |
| 23 | 110 | 220 | 1500 | 89 | 0,0075 | 22,8 |
| 24 | 45 | 440 | 500 | 86 | 0,162 | 25 |
| 25 | 55 | 220 | 600 | 87 | 0,029 | 34 |
| 26 | 75 | 220 | 750 | 88,5 | 0,014 | 18,8 |
| 27 | 100 | 440 | 1000 | 88 | 0,04 | 25,6 |
| 28 | 110 | 220 | 1500 | 89 | 0,0082 | 18,8 |
| 29 | 160 | 220 | 1900 | 90 | 0,004 | 25,6 |
| 30 | 55 | 220 | 500 | 86 | 0,016 | 28,6 |
Таблица 5.2
| № вар | Pном , кВт | Uном , В | nном , об/мин | ηном , % | Rя , Ом | Rв , Ом |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1 | 8,5 | 110 | 800 | 81 | 0,047 | 61,6 |
| 2 | 13 | 110 | 1120 | 84 | 0,026 | 61,6 |
| 3 | 22 | 220 | 1500 | 87,5 | 0,047 | 53 |
| 4 | 36 | 220 | 2200 | 89,5 | 0,026 | 46 |
| 5 | 60 | 440 | 3150 | 90,5 | 0,047 | 35 |
| 6 | 15 | 110 | 750 | 82 | 0,031 | 42 |
| 7 | 20 | 440 | 1000 | 85,5 | 0,286 | 155 |
| 8 | 30 | 220 | 1500 | 88,5 | 0,031 | 31 |
| 9 | 42 | 440 | 2360 | 90,5 | 0,055 | 31,7 |
| 10 | 55 | 440 | 3150 | 91 | 0,031 | 31,7 |
| 11 | 45 | 440 | 500 | 86 | 0,162 | 125 |
| 12 | 55 | 220 | 600 | 87 | 0,029 | 34 |
| 13 | 75 | 220 | 750 | 88,5 | 0,014 | 18,8 |
| 14 | 100 | 440 | 1000 | 88 | 0,04 | 25,6 |
| 15 | 110 | 220 | 1000 | 89 | 0,0082 | 18,8 |
| 16 | 160 | 440 | 1900 | 90 | 0,012 | 25,6 |
| 17 | 8,5 | 220 | 800 | 82 | 0,188 | 171 |
| 18 | 22 | 220 | 530 | 83 | 0,062 | 39,6 |
| 19 | 30 | 440 | 600 | 84,5 | 0,185 | 30 |
| 20 | 45 | 220 | 750 | 86 | 0,034 | 28 |
| 21 | 75 | 220 | 1000 | 88,5 | 0,016 | 22,8 |
| 22 | 90 | 440 | 1500 | 89 | 0,046 | 25 |
| 23 | 110 | 440 | 1500 | 89,5 | 0,034 | 30 |
| 24 | 71 | 440 | 1500 | 88,5 | 0,65 | 31,2 |
| 25 | 45 | 220 | 1000 | 86 | 0,03 | 25,1 |
| 26 | 37 | 220 | 750 | 83,2 | 0,051 | 33,4 |
| 27 | 30 | 440 | 750 | 84,3 | 0,261 | 33,4 |
| 28 | 20,8 | 220 | 600 | 82,2 | 0,082 | 33,4 |
| 29 | 26,5 | 440 | 600 | 81,5 | 0,38 | 34,7 |
| 30 | 10 | 110 | 750 | 77,5 | 0,065 | 72 |
5.3. Пример решения задания
Рассмотрим двигатель постоянного с параллельным возбуждением,
для которого
Pном =110 кВт,
Uном = 440 В ,
nном =1500 об/мин,
ηном =90 %,
Rя = 0, 034
Ом,
Rв =30 Ом. Рассчитаем параметры в соответствии с заданием.
Определяем номинальный ток, потребляемый двигателем, номи- нальный ток якоря и ток возбуждения.
Определим электрическую мощность, потребляемую из сети
P1,ном =
P2,ном
 ηном
ηном
= 110 ·103
 90
90
· 100 = 122, 2 кВт.
Тогда номинальный ток двигателя
|

|
ном
= 122, 2 ·103
 440
440
= 277, 7 А,
а ток возбуждения в номинальном режиме
Iв,ном
= Uном
 R в
R в
= 440 = 14,7 А.
 30
30
В соответствии со схемой замещения номинальный ток якоря
Iя,ном = Iном - Iв,ном = 277,7 -14,7 = 263,0 А.
Определим сопротивление пускового реостата
Rп , при котором
пусковой ток в цепи якоря составлял бы 2,5 Iя,ном . Заданная кратность пус-
кового тока ( К I
= Iп
 Iя,ном
Iя,ном
) составляет 2,5. Воспользуемся соотношением:
2,5I
я,ном = R
Uном .
+  R
R
Откуда получим:
я,ном п
Rп =
Uном
 2,5Iя,ном
2,5Iя,ном
- Rя
= 440
 2,5· 263
2,5· 263
- 0, 034 = 0, 635 Ом.
Определим номинальный вращающий момент двигателя:
М ном
= 9550 Pном
 nном
nном
= 9550 ·
110

1500
= 700 Н · м.
Определим начальный пусковой момент двигателя при заданной кратности пускового тока. Поскольку вращающий момент двигателя свя- зан с током якоря соотношением:
М ном = Cм Iя,номФном ,
то при неизменном магнитном потоке:
МП = См 2,5Iя,номФном = 2,5Мном = 2,5·700 =1750 Н · м.
Построим в одной системе координат естественную механическую характеристику и искусственную (при введении пускового реостата R П ) механическую характеристику. Естественную механическую характери- стику построим по двум точкам: ( nхх ; M = 0); ( nном ; М ном ). Определим час- тоту холостого хода при номинальном магнитном потоке. Воспользуемся соотношением для частоты холостого хода и вычислим:
 n = n
n = n
Uном
= 1500 ·
440
= 1533 об/мин.
хх ном U
ном - Iя,ном Rя

440 - 263· 0, 036
Таким образом, естественную механическую характеристику стро-
им по двум точкам: (n = nхх =1533 об/мин; М = 0); (n = nном = 1500 об/мин;
М = М ном = 700 Н · м ). Искусственную механическую характеристику (при
включении пускового реостата) строим также по двум точкам: (n =
nхх =1533 об/мин; М = 0); (n = 0 об/мин; М = М П = 1750 Н · м ). Следует
обратить внимание, что частота холостого хода при неизменном магнит- ном потоке остается такой же, как и для естественной механической харак- теристики.

Рис. 5.8. Механические характеристики двигателя: 1 – естественная,
2 – искусственная (пусковая)
фику:
Диапазон изменения частоты вращения можно определить по гра-
On = nном - n¢ = 1500 - 900 = 600 об/мин.
Рассмотрим работу двигателя при регулировании частоты вращения
изменением магнитного потока (при полюсном регулировании). При этом важно учесть, что момент сопротивления исполнительного механизма не изменяется, а, следовательно, изменение магнитного потока приведет к
изменению тока якоря. Введем коэффициент пропорциональности магнит- ного потока:
Ф = α · Фном ,
где α = 1; 0,8; 0,5. Тогда, сравнивая соотношения
М ном = См Iя¢Ф¢ , можно видеть:
Мном =
См Iя,номФном и
М = С I ¢Ф¢=С
Iя,ном · α · Ф .

ном м я м α
ном
При этом получаем, что изменяющийся ток якоря будет связан с но- минальным соотношением:
I ¢ = I
· Фном
= Iя,ном .

я я,ном Ф α
Каждая из трех механических характеристик может быть построена по двум точкам. Для естественной механической характеристики ( α = 1) данные получены ранее. Для двух других характеристик (при α = 0,8 и α = 0,5 ) будем использовать соотношения
n¢ = n
· Фном
= nхх ;

