 |
Главная |


Модель управляемого объекта в пространстве состояний
|
из
5.00
|
Переход к модели в пространстве состояний осуществляется по известному алгоритму. Переменными состояния  принимаются выходная координата и её производные. Последовательно выполняя замены, приняв
принимаются выходная координата и её производные. Последовательно выполняя замены, приняв  , запишем систему уравнений в пространстве состояний:
, запишем систему уравнений в пространстве состояний:


 , если | u | < 0.8,
, если | u | < 0.8,
 если | u | > 0.8.
если | u | > 0.8.
Дальнейшие исследования свойств управляемого объекта можно выполнить, используя модели при подаче на вход типовых воздействий.
Переходные характеристики объекта
Для получения переходной характеристики управляемого объекта по выходной координате подадим на вход ступенчатый сигнал  , а к выходу подключим осциллограф.
, а к выходу подключим осциллограф.

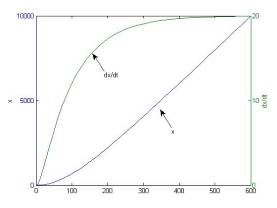
Переходные характеристики управляемого объекта с нелинейным элементом по выходной координате и ее скорости.
Предположения при анализе структурной схемы управляемого объекта подтвердились, т.е. при подаче на вход ступенчатого воздействия выходная координата неограниченно растет, а изменение ее скорости носит монотонный характер.
Установившееся значение скорости достигается примерно за 500[c]:
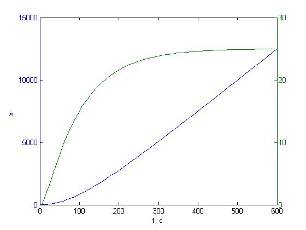
Переходные характеристики управляемого объекта без нелинейного элемента по выходной координате и ее скорости.
Установившееся значение скорости достигается примерно за 600[c]:
Частотные характеристики объекта
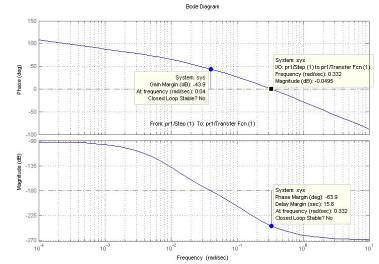
ЛАХ и ЛФХ управляемого объекта.
По полученным графикам можем определить частоту среза: ωc = 0.332[рад/сек].
Обоснование выбора структуры системы управления
Постановка задачи
Автоматическая система управления представляет собой совокупность управляемого объекта и автоматического управляющего устройства.

Известны три принципа управления – разомкнутого, замкнутого и компенсации возмущений. Наиболее разумно выбрать замкнутый принцип управления, так как задана высокая точность и не определен характер внешних воздействий. В этом случае управляющее воздействие будем формировать в виде функции:

где f – неубывающая функция отклонения х, его производных и интеграла, причем х = Хзад – Х. значение Хзад определяется заданным алгоритмом функционирования системы и представляет собой известную функцию времени, в частности, для систем стабилизации Хзад = const. В качестве первого приближения можно выбрать пропорциональный регулятор, в котором управляющее воздействие формируется в виде  , где
, где  - коэффициент передачи регулятора, который можно изменять для достижения наилучшего качества управления в рамках выбранной структуры.
- коэффициент передачи регулятора, который можно изменять для достижения наилучшего качества управления в рамках выбранной структуры.
|
из
5.00
|
Обсуждение в статье: Модель управляемого объекта в пространстве состояний |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы