 |
Главная |


Шинноколесное (пневмоколесное) ходовое оборудование
|
из
5.00
|
Шинноколесный движитель легче гусеничного, имеет большой ресурс работы (до 30 - 40 тыс. км пробега, что примерно в 20 раз выше ресурса гусеничного движителя), позволяет машине перемещаться на больших скоростях (до 60 км/ч и более) и по сравнению с гусеничным движителем отличается большей долговечностью и ремонтопригодностью, а также более высоким КПД. К его недостаткам относятся: большое удельное давление на основание в связи с малой контактной площадью и меньшая сила тяги по сцеплению движителя с грунтом. Для повышения сцепления при работе в труднопроходимой местности на колеса одевают цепи.
Шинноколесный движитель состоит из колес с пневматическими шинами, надеваемых на мосты. Колеса приводятся ходовой трансмиссией.
 Пневматические шины могут быть камерными (рис. 3.7, а) и бескамерными (рис. 3.7, б). Камерная шина состоит из покрышки, камеры, ободной ленты и вентиля для накачивания воздуха в камеру. Бескамерные шины представляют собой покрышки, герметически прилегающие к ободьям. Покрышки изготовляют из резины, армированной тканевым и металлическим кордом. Утолщенная периферийная часть покрышки (протектор) имеет рифления определенной формы, называемые рисунком протектора.
Пневматические шины могут быть камерными (рис. 3.7, а) и бескамерными (рис. 3.7, б). Камерная шина состоит из покрышки, камеры, ободной ленты и вентиля для накачивания воздуха в камеру. Бескамерные шины представляют собой покрышки, герметически прилегающие к ободьям. Покрышки изготовляют из резины, армированной тканевым и металлическим кордом. Утолщенная периферийная часть покрышки (протектор) имеет рифления определенной формы, называемые рисунком протектора.
Различают шины обычного профиля для землеройных машин / (рис. 3.7, в)для работы в каменных карьерах //, противобуксующие Ш и универсальные IV. Для повышения проходимости при работе на слабых и рыхлых грунтах, а также по снегу используют широкопрофильные и арочные (рис. 3.7, г) шины с повышенной опорной поверхностью и развитыми грунтозацепами. При работе арочных шин на твердых грунтах и дорогах с твердым покрытием сопротивление передвижению машины увеличивается, а срок службы шин резко уменьшается.
При взаимодействии шины с опорным основанием в зоне их контакта деформируется как шина, так и основание. Соотношение этих деформаций зависит от податливости контактирующих тел. В свою очередь, податливость шины зависит от давления воздуха в ней. Следовательно, при определенной внешней нагрузке на шину площадь контактной поверхности, а вместе с ней и среднее удельное давление зависит от давления воздуха в шине. Установлено, что в диапазоне нагрузок от 50 до 100% от допускаемых для данной шины при движении по твердому основанию среднее удельное давление составляет 90 ... 110% давления воздуха в шине. При движении по плотному грунту эти значения снижаются примерно на 10%. Максимальные же удельные давления, имеющие место в центральной части контактной поверхности, для большинства строительных машин при качении по плотной грунтовой поверхности и нагрузке, близкой к допускаемой, в два раза выше средних давлений, а при нагрузке, составляющей 50% от допускаемой - выше всего на 30%.
Для повышения проходимости машин, снижения сопротивления передвижению и износа шин в современных строительных машинах давление воздуха в шинах регулируют на ходу из кабины машиниста: его снижают при движении по рыхлому или влажному грунту и повышают при движении по дорогам с твердым покрытием.
В шинноколесном движителе различают приводные и управляемые колеса. Первые приводятся от ходовой трансмиссии, а вторыми управляют при изменении направления движения машины. Управляемые колеса могут быть одновременно и приводными. Для поворота машины используют как управляемые колеса (см. рис. 3.2, в), поворачиваемые относительно поворотных цапф, так и колеса с управляемой осью (рис. 3.2, г), поворачиваемой в плане относительно вертикального шкворня в ее средней части. В случае управляемых колес они приводятся от рулевой трапеции (см., например, поз. 7, 8 и 9 на рис. 2.48) длины звеньев которой подобраны так, чтобы обеспечить поворот колес с разными углами без бокового скольжения при передвижении на поворотах: больший угол для колеса, движущегося по внутренней концентрической окружности поворота, меньший - для колеса, движущегося по внешней окружности.
Шинноколесное ходовое оборудование может быть двухосным с одной или двумя ведущими осями, трехосным с двумя или тремя ведущими осями, четырехосным и т. д. Эту структуру обозначают колесной формулой вида А х В. Первой цифрой обозначают общее число колес (колесо из двух шин считается за одно колесо), а второй - число приводных колес. Наиболее распространены машины с колесными формулами 4x2 и 4 х 4. С увеличением числа приводных колес повышается проходимость и тяговые качества машины, но усложняется механизм передвижения. Используемое здесь понятие "ось" сложилось исторически, хотя оно не соответствует определению оси, приведенному в п. 2.10. Это понятие правомерно лишь применительно к осям с неприводными колесами, относительно же приводных колес правильно говорить не об осях, а о валах.
Приводы шинноколесного ходового оборудования строительных машин могут иметь механическую, гидравлическую и реже электрическую и комбинированную трансмиссии. В случае механических и гидромеханических трансмиссий ведущие колеса приводятся в движение попарно через дифференциальные механизмы, называемые также сокращенно дифференциалами и обеспечивающие высокие скорости движения без проскальзывания.
На рис. 3.8, а представлена схема устройства ведущего моста с дифференциалом, а на рис. 3.8., б и в - схема работы последнего. Дифференциал соединяет полуоси ведущих колес с главной конической передачей, давая возможность каждому колесу вращаться с различной скоростью. Это необходимо при повороте машины, когда колеса движутся по дугам окружностей различных радиусов, проходя разные пути, а также, например, при движении одного колеса по ровной, а второго - по неровной дороге.
Дифференциал состоит из главного конического колеса 1 (рис. 3.8, а), жестко соединенного с коробкой 3 и приводимого во вращение от силовой установки машины через шестерню 2, двух ведомых конических зубчатых колес 6 и 9, жестко посаженных на ведущие полуоси 4 и 10 ходовых колес 5 и 11, и двух сателлитов 7,  свободно посаженных на ось 8 и находящихся в постоянном зацеплении с колесами 6 и 9. Крутящий момент от зубчатого колеса / передается на коробку 3, вместе с которой вращается ось 8 и сателлиты 7, передающие вращение зубчатому колесу 6 с полуосью 4 и колесу 9 с полуосью 10. При движении по прямой ровной дороге (рис. 3.8, б) все составные части дифференциала, а вместе с ними и полуоси с ходовыми колесами вращаются как одно целое. При повороте вправо (рис.
свободно посаженных на ось 8 и находящихся в постоянном зацеплении с колесами 6 и 9. Крутящий момент от зубчатого колеса / передается на коробку 3, вместе с которой вращается ось 8 и сателлиты 7, передающие вращение зубчатому колесу 6 с полуосью 4 и колесу 9 с полуосью 10. При движении по прямой ровной дороге (рис. 3.8, б) все составные части дифференциала, а вместе с ними и полуоси с ходовыми колесами вращаются как одно целое. При повороте вправо (рис.
3.8, в) ходовые колеса, их полуоси и зубчатые колеса 6 и 9 вращаются с разными скоростями, а сателлиты 7 обкатываются относительно зубчатого колеса 6, одновременно вращаясь относительно оси 8, и, вследствие зацепления с колесом 9, увеличивают его скорость. При повороте влево сателлиты обкатываются относительно зубчатого колеса 9, увеличивая скорость колеса б. Описанный дифференциал обладает двумя свойствами: он распределяет крутящий момент мезкду приводимыми им полуосями поровну, а сумма скоростей двух полуосей всегда пропорциональна скорости ведущего вала. Это означает, что с уменьшением скорости вращения одной полуоси на столько же увеличится скорость второй полуоси. В частности, при полной остановке одной полуоси, например, при буксовании, когда одно ходовое колесо находится на сухой, а второе - на увлажненной поверхности, скорость второй полуоси удвоится.
Для устранения возможности буксования при движении в сложных дорожных условиях дифференциал блокируют специальными устройствами. Привод без дифференциала более прост, обеспечивает более высокие тяговые усилия, но при поворотах машины и при движении по неровной дороге увеличиваются расход энергии и износ шин.
В последние годы в строительных машинах получает развитие индивидуальный привод каждого колеса от собственного гидро- или электромотора, называемый приводом с мотор-колесами. Мотор-колесо представляет собой самостоятельный блок, обычно состоящий из двигателя, муфты, планетарного редуктора, тормоза и колеса. Применение гидропривода с высоким давлением позволяет при низкомоментных гидродвигателях создавать компактные, встроенные в обод колеса, конструкции, успешно конкурирующие с другими типами приводов. Применение мотор-колес упрощает компоновку машины, повышает ее маневренность и проходимость за счет того, что каждое колесо может служить одновременно приводным и управляемым (поворотным).
Рельсоколесное ходовое оборудование отличается простотой устройства, невысокой стоимостью, достаточной долговечностью и надежностью. Оно представляет собой либо тележку, обычно оборудованную двумя осями с металлическими одно- или двух-ребордными колесами, либо набор из трех или четырех двухколесных тележек велосипедного типа. Благодаря ограниченной рабочей зоне рельсоколесные машины обычно используют энергию внешней электросети. Основными недостатками являются: сложность перебазирования на новые строительные площадки, дополнительные затраты на устройство и техническую эксплуатацию рельсовых путей. Устройство и принцип работы рельсоколесного ходового оборудования применительно к башенным кранам рассмотрен в главе 6.
Рельсовый путь, не являющийся принадлежностью машины, обеспечивает последней низкое сопротивление передвижению, постоянную траекторию движения и связанную с этим возможность машины выполнять технологический процесс с высокой точностью.
Тяговые расчеты.
В тяговых расчетах решается задача определения сопротивлений передвижению машины и ее тяговых возможностей. Сопротивление передвижению W (Н) складывается из сопротивлений на рабочем органе машины Wpo (H), передвижению (перекатыванию) движителей Wnep (H) по горизонтальному пути, повороту машины Wnoa (H), движению на уклоне местности f?y (H), инерции при разгоне и торможении W„ (H) и ветрового давления Wa (H):

Из этого набора сопротивлений удерживаются только те сопротивления, которые имеют место в конкретном транспортном режиме работы машины. Так, сопротивление W-o сохраняется в приведенной выше формуле только в случае тягового расчета рабочего процесса технологической машины, например, бульдозера на операции послойной разработки грунта. Это сопротивление зависит от назначения и типа машины, характера выполняемых работ, конструкции рабочего органа и других факторов. Методы расчета этого сопротивления приводятся в разделах, посвященных конкретным типам технологических машин. Сопротивления Wnm, Wy и Wn сохраняются лишь в тяговых расчетах соответственно при повороте, движении на уклоне и при разгоне.
Сопротивление перекатыванию определяют приближенно как

где/- коэффициент сопротивления передвижению движителей, средние значения которого для некоторых видов опорных поверхностей приведены в табл. 3.1; G - вертикальная составляющая внешней нагрузки на движители (Н).
Сопротивление повороту колесных машин, передвигающихся по твердому основанию, обычно мало и в расчетах не учитывается.


Сопротивление повороту гусеничных машин определяется затратами энергии на срезание и смятие грунта гусеницами и на преодоление сил трения гусениц о грунт. При движении по вязкому рыхлому грунту

С уменьшением радиуса поворота сопротивления WnoB обычно возрастают. Сопротивление движению от уклона местности определяют по формуле:

где т - масса машины, кг; g - ускорение свободного падения, g = 9,81 м/с2; a - угол подъема пути машины. Знак (+) соответствует движению машины на подъем, (-) - под уклон.
Сопротивление сил инерции при разгоне и торможении в предположении равноускоренного (равнозамедленного) движения:

где v - скорость в конце разгона или начале торможения (м/с); /_(т) - продолжительность разгона (торможения) (с). Знак (+) принимается при разгоне, (-) - при торможении.
Сопротивление ветрового давления:

где S - площадь, воспринимающая давление ветра (м2); qB - распределенная ветровая нагрузка на 1 м2 воспринимающей поверхности (Па). Нормативные значения ветровой нагрузки приведены в главе 6.
Два последних сопротивления учитывают, в основном, в тяговых расчетах шин-ноколесных машин, передвигающихся со сравнительно большими скоростями. Гусеничные машины передвигаются с малыми скоростями и для них указанные сопротивления оказываются малыми, в связи с чем ими обычно пренебрегают. Также в проектных тяговых расчетах гусеничных машин из двух сопротивлений подъему и повороту учитывают лишь одно, имеющее большее значение, поскольку для этих машин одновременного подъема и поворота всегда можно избежать, выполняя эти движения раздельно.
Движение машины возможно, если максимальное тяговое усилие Гтах (Н) будет не меньше суммарного сопротивления движению W (Н):]

Усилие Гтах ограничено двумя факторами - мощностью привода ходового устройства и условиями сцепления движителя с опорным основанием, с которыми оно связано зависимостями:

где Рх - суммарная мощность двигателей механизма передвижения (Вт); т|х - общий КПД механизма передвижения; v - скорость передвижения (м/с); ф - коэффициент сцепления движителя с основанием (см. табл. 3.1).
Неудовлетворение указанному выше условию по тяговому усилию Гтах (Рх) означает недостаток мощности для движения машины с заданной скоростью v. Движение возможно с переходом на более низкие скорости передвижения, если они не ограничены кинематикой привода. Если то же условие не удовлетворяется по усилию Ттт(ц>), то это означает, что машина не может двигаться из-за буксования движителей. Движение возможно при увеличении нормальной к поверхности передвижения нагрузки G или при увеличении коэффициента сцепления ср. Для устранения буксования под буксующий движитель обычно подкладывают материал с большим коэффициентом сцепления.
Для шинноколесных движителей в первой из формул (3.5) под v следует понимать теоретическую скорость (м/с):

где гс - силовой радиус, м; пл - номинальная частота вращения вала двигателя ходового механизма (при групповом приводе - ДВС), об/мин; и - передаточное число трансмиссии.
Силовой радиус определяется как радиус недеформированного колеса г0 за вычетом наибольшей радиальной деформации шины (в центральной зоне контактной поверхности) X (м):
Эта скорость реализуется на первом диапазоне коробки передач.
При движении на подъем с углом по сухой укатанной грунтовой дороге нормальная к поверхности передвижения нагрузка:

Сопротивление передвижению (с учетом сопротивлению подъему):

Максимальное тяговое усилие по сцеплению гусеничного движителя с дорогой:

Движение на уклоне с углом по условиям сцепления движителя с дорогой возможно, если Т' > W"-


Максимальная скорость на подъеме:

что обеспечивается также на первом диапазоне коробки передач.
Контрольные вопросы к главе 3
1. Для чего предназначено ходовое оборудование строительных машин? Что такое активное и пассивное ходовое оборудование? Из каких составных частей состоит ходовое оборудование?
2. Перечислите виды ходового оборудования по типу движителей. Дайте краткую характеристику каждого вида (назначение, особенности эксплуатации).
3. Что собой представляют гусеничные и шинноколесные движители? Как их соединяют с верхней рамой машины? Перечислите виды подвесок и охарактеризуйте их.
4. Назовите основные технико-эксплуатационные показатели ходового оборудования машин. Какими показателями они характеризуются? Приведите примеры определения параметров маневренности гусеничных движителей при различных способах поворота и шинноколесных.

Приближенно при движении по плотному грунту X = (0,12 ... 0,15)В; по рыхлому грунту -Х = (0,08 ... 0,1)5 {В - ширина профиля шины).
Фактическую скорость передвижения (м/с) шинноколесной машины определяют с учетом буксования по формуле:

где 5 - коэффициент буксования, определяемый в зависимости от отношения окружной силы при буксовании к нормальной реакции грунта, типа шин, давления воздуха и грунтовых условий.
Установлено, что при 8 = 0,1 колесный движитель работает с максимальным КПД, при 8 = 0,2 достигается максимальная тяговая мощность, при 8 = 0,3 развивается наибольшая устойчивая сила тяги.
В качестве примера определим максимально возможную скорость передвижения гусеничного трактора Т-330. буксирующего пневмоколесную землевозную тележку с шинами высокого давления, на горизонтальном участке по свежеотсыпанному грунту, а также максимальный подъем, который может преодолеть трактор при движении по сухой укатанной грунтовой дороге, и скорость передвижения тракторного поезда на этом подъеме. Масса трактора тт = 39,8 т; масса груженого прицепа тп = 55,7 т; мощность двигателя Р = 250 кВт; в трансмиссии трактора установлена коробка передач для бесступенчатого регулирования скоростей передвижения в трех диапазонах: от 0 до 3,5 км/ч; от 0 до 6,45 км/ч; от 0 до 13 км/ч; КПД трансмиссии г| = 0.8.
Коэффициенты сопротивления передвижению и коэффициенты сцепления гусеничного движителя с дорогой принимаем по табл. 3.1. При движении по свежеотсыпанному грунту: для трактора -f7' = 0,085; ф' = 0,65; для прицепа -/„ = 0,35. При движении по сухой укатанной грунтовой дороге: для трактора -fj= 0,065; q>" = 0,9; для прицепа - f n = 0,04.
При движении по горизонтальной дороге нормальная к поверхности передвижения нагрузка составит:


Максимальное тяговое усилие по сцеплению гусеничного движителя с дорогой:

Так как Т'№max > W', то движение трактора не ограничивается сцеплением его движителя с дорогой. Максимальная скорость передвижения:

движителей для различных схем расположения колес.
5. Изложите устройство гусеничного ходового оборудования. Чем отличаются мягкие гусеницы от жестких? Какими мерами повышают сцепление гусеничного движителя с грунтом? Какие виды трансмиссий применяют в приводах гусеничного ходового оборудования?
6. Что такое удельное давление? Как связаны между собой глубина погружения гусениц в грунт и удельное давление на его поверхности? Что такое коэффициент постели, каков его физический смысл? Изложите методику определения удельных давлений для общего случая нагруже-ния гусеничной тележки.
7. Каковы преимущества и недостатки шинноколесного ходового оборудования? Какие типы шин применяют в шинноколесных движителях? Как устроены покрышки шин? Для чего применяют широкопрофильные и арочные шины? Каковы особенности их эксплуатации? Для чего и как регулируют давление воздуха в шинах?
8. Что такое приводное колесо? управляемое колесо? Приведите классификацию шинноколесного ходового оборудования по числу осей. Что такое колесная формула? Для чего применяют многоосные ходовые устройства?
9. Какие виды трансмиссий применяют в приводах шинноколесного ходового оборудования? Опишите привод с механической трансмиссией. Как устроен и как работает дифференциал? Каковы его свойства? В каких случаях блокируют дифференциал?
10. Что такое мотор-колесо? Из чего оно состоит? На какие характеристики передвижения оно оказывает влияние?
11. Перечислите преимущества и недостатки рельсоколесного ходового оборудования?
12. Какие задачи решаются в тяговых расчетах строительных машин? Охарактеризуйте внешние сопротивления передвижению машины. Объясните основное условие движения машины. Чем ограничено тяговое усилие? Что на практике означает невыполнение условия движения?
ГЛАВА 4. ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИКИ И ОСНОВЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
4.1. Общие сведения о системах автоматики
Автоматизация строительных машин заключается в применении технических средств и систем управления, освобождающих человека-оператора (полностью или частично) от непосредственного участия в процессах управления работой машины или комплектов машин. Развитие автоматических систем управления обусловлено необходимостью более высоких скоростей и усилий управления развивающейся техникой, значительно превышающих физические возможности человека; повышения технико-экономических показателей и обеспечения наилучших (оптимальных) режимов работы; снижения утомляемости операторов и, как следствие, повышения надежности их работы и снижения аварийности; создания новых средств управления рабочими процессами в условиях, опасных для жизни и здоровья человека или недоступных для него.
Управление любым техническим объектом (машиной, ее частью, комплектом машин, технологическим процессом и т. п.) состоит из контроля его фактического состояния и регулирования. В системе автоматического управления (САУ) все эти процессы выполняются без участия человека (оператора) по специальным программам. Управление заключается в формировании управляющих воздействий, обеспечивающих требуемое состояние или режим работы объекта управления, а также в их реализации. Автоматический контроль заключается в автоматическом получении информации о состоянии объекта или характере протекания технологического процесса, либо о наступлении их предельных значений, установленных нормативно-технической документацией. Автоматическое регулирование является разновидностью автоматического управления. Оно заключается в поддержании постоянства или изменения по требуемому закону некоторой физической величины, характеризующей управляемый процесс. Регулирование обеспечивается системой автоматического регулирования (САР).
 По характеру алгоритма управления (набору правил, по которым изменяется управляющее воздействие) различают системы управления по разомкнутому (без обратной связи) (рис. 4.1, а) и замкнутому циклу (с обратной связью)
По характеру алгоритма управления (набору правил, по которым изменяется управляющее воздействие) различают системы управления по разомкнутому (без обратной связи) (рис. 4.1, а) и замкнутому циклу (с обратной связью)
В системах разомкнутого цикла задающее воздействие X подается от программного устройства на управляющее устройство УУ, которое обрабатывает данные протека-
ния процесса и при помощи исполнительного органа воздействует (УВ - управляющее воздействие) на объект управления ОУ. Результатом являются выходные параметры Y, харастеризующие текущее состояние объекта управления. Последние претерпевают непланируемые изменения из-за воздействия на объект управления внешних возмущений (помех) F вследствие взаимодействия рабочих органов строительных машин с рабочей средой, движителей с дорогой и зависящих от характеристики приводов. Разомкнутые САУ применяют при отсутствии влияния неконтролируемых возмущений. Они служат для стабилизации программного управления, а также для дистанционного управления (управления на расстоянии), но без применения корректирующих воздействий.
В системах замкнутого цикла на управляющее устройство по обратной связи поступает информация об отклонении выходной величины Кот заданного значения, что позволяет сформировать управляющее воздействие, возвращающее величину К в заданное положение. В комбинированных системах используются схемы как с обратной связью (управляющее устройство УУ]), так и без нее (управляющее устройство УУ2)-
В качестве примера системы с обратной связью рассмотрим автоматическое управление заглублением отвала бульдозера при планировке земляных поверхностей с приводимой ранее системой управления с гидравлическим усилителем (см. рис. 2.51). В случае автоматического управления на управляющее устройство поступает задающее воздействие, по которому формируется сигнал удержания отвала на определенном уровне, соответствующем толщине среза грунта при строго горизонтальном перемещении бульдозера. Чтобы избежать копирования движителями неровностей поверхности передвижения режущей кромкой отвала, его следует приподнимать при движении во впадинах и заглублять при движении на буграх. Информация о рельефе местности в месте нахождения бульдозера, полученная, например, фотоприемником по отклонению машины от уровня, заданного лазерным лучом (обратная связь), поступает в управляющее устройство, которое, после ее обработки, подает управляющий сигнал на корректировку положения отвала.
 Примером комбинированной системы может служить автоматическое управление отвалом автогрейдера, подвешенным на двух гидроцилиндрах по краям отвала. Один гидроцилиндр является исполнительным органом системы с обратной связью, работающей по изложенному выше принципу, а второй гидроцилиндр стабилизирует поперечный наклон отвала в зависимости от положения второго гидроцилиндра, работая без обратной связи.
Примером комбинированной системы может служить автоматическое управление отвалом автогрейдера, подвешенным на двух гидроцилиндрах по краям отвала. Один гидроцилиндр является исполнительным органом системы с обратной связью, работающей по изложенному выше принципу, а второй гидроцилиндр стабилизирует поперечный наклон отвала в зависимости от положения второго гидроцилиндра, работая без обратной связи.
По назначению различают системы ав-тематической стабилизации, программного управления, следящие и самонастраивающиеся системы. В системах стабилизации управляющее (регулирующее) воздействие фор-Д1 ^ JT^ мируется в результате сравнения действительного значения регулируемой величины с заданным алгоритмом. Эти системы обычно Рис. 4.2. Функциональная схема системы состоят из системы автоматического измере-стабилизации ния> которая может быть частью системы ав-
томатического контроля, и внутризамкнутой САУ. Система автоматического измерения включает датчик (чувствительный элемент и элемент преобразования), усилители, линию связи и измерительный прибор, а система автоматического контроля, кроме того - задающий элемент и элемент сравнения. Схема автоматической системы стабилизации показана на рис. 4.2. Состояние объекта управления ОУ, выраженное признаком или параметром а, воспринимается датчиком Д1 и, преобразованное в удобную форму аь подается на промежуточный элемент ПР1 для усиления и преобразования в регистрируемый сигнал а2. Этот сигнал, вместе с сигналом сравнения а2 от задатчика ЗУ, подается на блок сравнения СР, который формирует сигнал рассогласования С = ±а = а2- а{. Последний поступает в промежуточный элемент ПР2, формирующий сигнал С1 для исполнительного элемента ИУ, воздействующего сигналом С2 на объект управления, не позволяя ему выйти за установленные пределы при внешнем воздействии ВВ.
В случае следящей САР совместно с задатчиком ЗУ устанавливают датчик Д2, который непрерывно измеряет переменную величину а2" и в соответствии с ее значением пропорционально изменяет величину а, воспринимаемую датчиком Д1.
 На рис. 4.3 представлена упрощенная схема замкнутой системы программного управления. В отличие от рассмотренной выше схемы (см. рис. 4.2) задатчик программы ЗП подает сигнал Сп на блок управления по определенной программе, которая должна обеспечить (с учетом влияния внешней среды ВС на объект ОУ) заданную траекторию протекания выходного процесса ВП. Для этого информация о состоянии ВС и траектория протекания ВП по линии обратной связи (ОС) поступает на блок сравнения СР, формирующий управляющие воздействия.
На рис. 4.3 представлена упрощенная схема замкнутой системы программного управления. В отличие от рассмотренной выше схемы (см. рис. 4.2) задатчик программы ЗП подает сигнал Сп на блок управления по определенной программе, которая должна обеспечить (с учетом влияния внешней среды ВС на объект ОУ) заданную траекторию протекания выходного процесса ВП. Для этого информация о состоянии ВС и траектория протекания ВП по линии обратной связи (ОС) поступает на блок сравнения СР, формирующий управляющие воздействия.
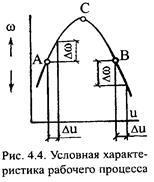 Самонастраивающиеся системы управления решают задачи значительно более сложные и разнообразные, чем задачи программных систем. Первая задача таких систем - поддержание экстремума управляемой величины. Для этой цели на объект подают пробные воздействия со стороны управления, анализируют знак изменения управляемой величины и по результатам этого анализа делают управляющее воздействие, приближающее режим к точке экстремума. Устройства, обеспечивающие режим работы управляемого объекта, близ-Рис 4 4 Условная характе- кии к оптимальному, называют автоматическими оптимиза-ристика рабочего процесса торами или экстремальными регуляторами.
Самонастраивающиеся системы управления решают задачи значительно более сложные и разнообразные, чем задачи программных систем. Первая задача таких систем - поддержание экстремума управляемой величины. Для этой цели на объект подают пробные воздействия со стороны управления, анализируют знак изменения управляемой величины и по результатам этого анализа делают управляющее воздействие, приближающее режим к точке экстремума. Устройства, обеспечивающие режим работы управляемого объекта, близ-Рис 4 4 Условная характе- кии к оптимальному, называют автоматическими оптимиза-ристика рабочего процесса торами или экстремальными регуляторами.
Проиллюстрируем работу самонастраивающейся системы графиком (рис. 4.4) изменения выходной величины со в функции входной величины и [со =/(«)]. Пусть первоначально рабочей точкой характеристики со =/(м) будет точка А или В, не совпадающая с точкой максимума С. При этом неизвестно, на какой из этих точек работает объект управления. Пробным воздействием изменяют входной сигнал, дав ему положительное приращение Aw и установив специальным датчиком знак соответствующего ему приращения выходной величины Дсо. Если Дсо положительно, то рабочей является точка А, и для приближения к максимуму в дальнейшем входному сигналу и следует давать положительные приращения и наоборот - при отрицательном Дсо входному сигналу и следует давать отрицательные приращения.
Вторая задача самонастройки - поддержание оптимальной работы системы регулирования по критерию ее максимального быстродействия. Время, в течение которого система приходит в соответствие с изменением условия регулирования, анализируется специальным устройством самонастройки, изменяющим параметры регулятора так, чтобы время регулирования было минимальным.
В сложных, не имеющих математического описания системах с многими неконтролируемыми воздействиями, для нахождения оптимального условия работы необходимо запоминать различные режимы управления, учиться управлять. Это осуществляется самообучающимися САУ. В зависимости от значений входных и выходных величин автомат выбирает из памяти системы соответствующие значения управляющих воздействий.
|
из
5.00
|
Обсуждение в статье: Шинноколесное (пневмоколесное) ходовое оборудование |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы