 |
Главная |


ИЗУЧЕНИЕ ДВИЖЕНИЯ ГИРОСКОПА
|
из
5.00
|
Принадлежности: прибор FPM-10
Цель работы: изучение прецессионного движения гироскопа.
Введение.
Гироскоп – быстровращающееся симметричное твердое тело, ось вращения (ось симметрии) которого может изменять свое направление в пространстве. Свойствами гироскопа обладают вращающиеся небесные тела, артиллерийские снаряды, роторы турбин, устанавливаемых на судах, винты самолетов и т. д. В современной технике гироскоп – основной элемент всевозможных гироскопических устройств или приборов, широко применяемых для автоматического управления движением самолетов, судов, торпед, ракет и в ряде других систем гироскопической стабилизации, для целей навигации (указатели курса, поворота, горизонта, стран света), для измерения угловых или поступательных скоростей движущихся объектов (ракет) и во многих других случаях.
Чтобы ось гироскопа могла поворачиваться в любом направлении, его помещают в карданов подвес (рис.1). Все три оси подвеса пересекаются в одной точке О – центре карданова подвеса. Закрепленный в таком подвесе гироскоп имеет три степени свободы и может совершать любой поворот около центра подвеса. Если центр тяжести совпадает с центром подвеса, гироскоп называют уравновешенным.

|
| Рис. 1 |
Теория гироскопа относится к разделу динамики твердого тела. В общем виде движение гироскопа представляет собой одну из самых трудных задач механики. Однако в тех случаях, когда гироскоп быстро вращается относительно главной оси инерции и медленно относительно других осей, возможен элементарный анализ его движения. Движение твердого тела, имеющего одну закрепленную точку, описывается уравнением:

Для анализа движения гироскопа уравнение (1) удобно записать в такой форме

Откуда следует, что изменение момента количества движения за время  равно произведению суммарного момента всех внешних сил
равно произведению суммарного момента всех внешних сил  на время его действия и совпадает с ним по направлению.
на время его действия и совпадает с ним по направлению.
В гироскопе различают три направления (оси), проходящие через неподвижную точку тела: 1) направление мгновенной оси вращения, определяемое направлением вектора мгновенной угловой скорости; 2) направление главного момента количества движения (момента импульса); 3) ось симметрии тела. Все три оси в общем случае могут не совпадать по направлению, что значительно усложняет анализ движения гироскопа. Только при очень быстром вращении его вокруг оси симметрии вектор главного момента количества движения и вектор мгновенной угловой скорости практически совпадают с направлением оси симметрии. Поэтому о движении мгновенной оси вращения можно судить по движению оси симметрии гироскопа.
При отсутствии момента внешних сил (  ) из уравнения (1) следует
) из уравнения (1) следует  , т.е. главный момент количества движения (ось симметрии гироскопа) остается в пространстве неподвижным. При кратковременном воздействии внешних сил (при ударе) ∆t очень мало, поэтому на основании уравнения (2) будут очень малы и изменения ориентации
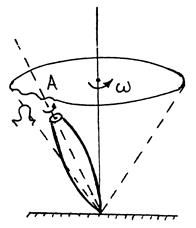
, т.е. главный момент количества движения (ось симметрии гироскопа) остается в пространстве неподвижным. При кратковременном воздействии внешних сил (при ударе) ∆t очень мало, поэтому на основании уравнения (2) будут очень малы и изменения ориентации  , и оси симметрии гироскопа. При длительном воздействии внешних сил направление в пространстве вектора главного момента количества движения, мгновенной угловой скорости и оси симметрии гироскопа будут изменяться. В том случае, когда направление внешних сил все время одно и то же, ось гироскопа описывает круговую коническую поверхность (рис. 2). Такое движение гироскопа называют ПРЕЦЕССИЕЙ.
, и оси симметрии гироскопа. При длительном воздействии внешних сил направление в пространстве вектора главного момента количества движения, мгновенной угловой скорости и оси симметрии гироскопа будут изменяться. В том случае, когда направление внешних сил все время одно и то же, ось гироскопа описывает круговую коническую поверхность (рис. 2). Такое движение гироскопа называют ПРЕЦЕССИЕЙ.
|
| Рис. 2 |
Пусть гироскоп быстро вращается вокруг оси ОУ с угловой скоростью ω (рис.3). Если J – его момент инерции относительно оси ОУ, то момент импульса (момент количества движения) гироскопа есть вектор, направленный по оси ОУ.

Если к концу оси гироскопа подвесить груз на расстоянии а от центра О, то на гироскоп будет действовать момент силы тяжести, направленный горизонтально перпендикулярно плоскости, в которой лежат ось гироскопа и сила тяжести.

Под действием момента силы тяжести ось гироскопа будет прецессировать вокруг вертикальной оси ОZ и в горизонтальной плоскости. За малый промежуток времени dt вектор момента импульса гироскопа вместе с осью гироскопа повернется на малый угол dφ. Изменение  вектора момента импульса (разность векторов
вектора момента импульса (разность векторов  1 и 2 момента импульса в конечном и начальном положениях) лежит в горизонтальной плоскости и направлено в сторону прецессии (рис.3).
1 и 2 момента импульса в конечном и начальном положениях) лежит в горизонтальной плоскости и направлено в сторону прецессии (рис.3).

|
| Рис. 3 |
Если момент внешних сил достаточно мал, то можно считать, что вектор постоянен по модулю, он изменяется лишь по направлению, поэтому

Разделим обе части последнего равенства на dt

где  – угловая скорость вращения гироскопа вокруг вертикальной оси ОZ (угловая скорость прецессии).
– угловая скорость вращения гироскопа вокруг вертикальной оси ОZ (угловая скорость прецессии).
Уточним, что значит достаточно малый момент внешних сил.
Если угловая скорость  <<
<<  , то
, то  определяется в основном значением , т.е.
определяется в основном значением , т.е.  , а это значит, что
, а это значит, что  . Таким образом,
. Таким образом,  должен быть таким, чтобы гироскоп вращался вокруг оси ОZ гораздо медленнее, чем вокруг оси ОУ.
должен быть таким, чтобы гироскоп вращался вокруг оси ОZ гораздо медленнее, чем вокруг оси ОУ.
Из уравнения моментов (1) следует, что

 .
.
Подставляя это выражение в (6), получаем связь между угловой скоростью прецессии и приложенным моментом
 (8)
(8)
где m – масса груза, a – плечо силы тяжести  груза, J – момент инерции гироскопа относительно горизонтальной оси, ω – угловая скорость вращения гироскопа.
груза, J – момент инерции гироскопа относительно горизонтальной оси, ω – угловая скорость вращения гироскопа.
|
из
5.00
|
Обсуждение в статье: ИЗУЧЕНИЕ ДВИЖЕНИЯ ГИРОСКОПА |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы