 |
Главная |


Двигатели параллельного и независимого возбуждения.
|
из
5.00
|
Профессионального образования «Вологодская государственная
Молочнохозяйственная академия имени Н.В. Верещагина»
(ФГОУ ВПО ВГМХА им. Н.В. Верещагина)
Методические указания
Часть 2
электропривод и электрооборудование
Молочное 2003г
Механическая характеристика двигателя постоянного тока при различных режимах загрузки и напряжении питающей сети.
Цель работы:
1. Ознакомится с устройством и работой машины постоянного тока в режиме двигателя.
2. Изучить устройство и работу шунтового, компаундного и сериесного двигателей постоянного тока, их механические характеристики.
3. Ознакомится с контрольно – измерительными приборами и регуляторами стенда.
4. По опытным данным построить механическую характеристику машины и ее рабочие характеристики.
5. Результаты расчетов и принципиальные электрические схемы занести в отчет. По результатам работы сформулировать вывод.
Основные теоретические положения.
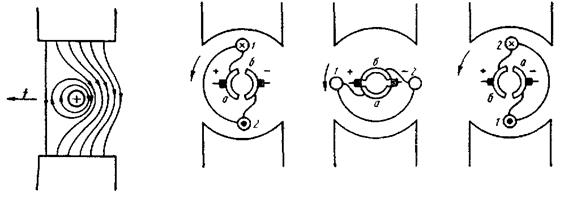
Двигательное действие машины постоянного тока, как и любой электрической машины, основано на законе Био—Савара. На проводник, помещенный в однородное магнитное поле, индукция которого В и по которому проходит ток I, действует электромагнитная сила f, значение ее при расположении проводника перпендикулярно направлению силовых линий определяется выражением:
f=Вх* L* I (1)
где: Вх— индукция в месте расположения проводника, Тл.
L — длина той части проводника, которая находится в магнитном поле, м.
I — ток, а.
Направление действия электромагнитной силы определяется правилом левой руки (рис. 1).
Коллектор предназначен для изменения направления тока в проводах обмотки, при переходе проводников через геометрическую нейтраль (рис. 2). Покажем это на примере витка 1—2, помещенного в магнитное поле. Из рисунка 2 видно, что в положении I виток будет вращаться против направления движения часовой стрелки. В положении II виток пройдет геометрическую нейтраль по инерции, в положении III направление тока в витке изменится на противоположное благодаря коллектору. Из сопоставления положений I и III видно, что виток будет продолжать вращаться в ту же сторону, так как электромагнитный момент, действующий на виток на протяжении полного оборота, направлен в одну сторону.
Основное уравнение напряжений двигателя таково:
U - Iя*Rя = Ея (2)
где: U — напряжение, приложенное к цепи якоря.
Iя — ток якоря.
Rя= rя+  — полное сопротивление цепи якоря, включающее как сопротивления обмотки якоря и всех обмоток, соединенных последовательно с якорем, так и сопротивление щеточных контактов, падение напряжения в которых равно 2∆u.
— полное сопротивление цепи якоря, включающее как сопротивления обмотки якоря и всех обмоток, соединенных последовательно с якорем, так и сопротивление щеточных контактов, падение напряжения в которых равно 2∆u.
Ея— э. д. с,, индуктированная в обмотке якоря при его вращении в магнитном поле машины.
 N N N N
N N N N
S S S S
I II III
Рис. 1. Взаимодействие Рис. 2. К пояснению назначения кол-
проводника с током в лектора в двигателе постоянного тока.
магнитном поле полюсов.
Для изменения направления вращения двигателя изменяют направление тока в обмотке якоря или в обмотке возбуждения (знак полюсов). При одновременном изменении направления тока в обеих обмотках направление вращения не меняется.
По способу возбуждения двигатели постоянною тока, как и генераторы, подразделяются на двигатели параллельного, последовательного и смешанного возбуждения.
Двигатели параллельного и независимого возбуждения.
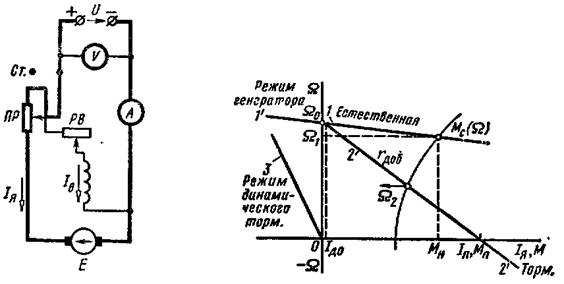 |
Схема двигателя параллельного возбуждения с пусковым реостатом приведена на рис. 3.а. Цепь возбуждения двигателя включается непосредственно в сеть до пускового реостата, так как при пуске ток возбуждения и поток должны быть наибольшими. Реостат РВ в цепи возбуждения при этом должен быть выведен.
а б
Рис.3. а – Схема двигателя параллельного возбуждения,
б – механические характеристикидвигателя параллельного возбуждения.
Обмотка возбуждения этого двигателя может быть включена на напряжение другого источника. Независимое возбуждение расширяет возможности регулирования скорости вращения двигателя.
Как указывалось, ток якоря двигателя при установившемся вращении определяется моментом на валу и потоком полюса. Потоки полюсов в двигателе при Iв = const можно считать постоянными: Ф = const. Следовательно, в двигателях параллельного и независимого возбуждения ток якоря пропорционален моменту на валу.
Механическая характеристика при rдоб.= 0 и Ф = Фн называется естественной. Прямая Ω(М) очень пологая (прямая 1 на рис. 3.б). При нагрузках на валу в пределах до номинальной скорость двигателя уменьшается мало, на 3-7% от Ω0, пропорционально падению напряжения на внутреннем сопротивлении якоря. Говорят, что естественная механическая характеристика этого двигателя «жесткая».
Регулировать скорость вращения двигателя параллельного возбуждения, можно двумя способами: изменяя поток Ф машины или суммарное сопротивление rяΣ = rя+rдоб в цепи якоря двигателя при постоянном напряжении сети.
Полюсное регулирование. Рассмотрим регулирование скорости изменением потока полюсов (полюсное регулирование). Cкорость вращения при холостом ходе двигателя обратно пропорциональна потоку возбуждения. Зависимость скорости вращения двигателя при холостом ходе от тока возбуждения Ω0(IB) при U— const определяется регулировочной характеристикой холостого хода (рис. 4.). Здесь же дана зависимость Ф0 (IВ).
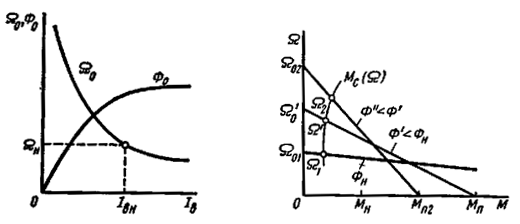 |
При значительном уменьшении тока возбуждения (особенно при обрыве цепи возбуждения) ток якоря и скорость вращения ненагруженного двигателя сильно возрастают, усиливается искрение щеток и появляется опасность механических повреждений якоря. Говорят, что двигатель «идет вразнос». Это явление недопустимо, поэтому двигатель снабжают автоматической защитой, отключающей его от сети при чрезмерном уменьшении потока (ниже 1/3ФH). Искусственные механические характеристики двигателя при различных значениях потока возбуждения показаны на рис. 5.
Рис.4. Рис.5.
Каждому значению потока соответствует новое значение Ω0 и Мп. Такое регулирование обычно ведется «на уменьшение потока» при небольших, нагрузках, для увеличения скорости сверх номинальной. При моментах нагрузки, близких, к номинальному, с уменьшением потока ток якоря превысит номинальный, что в длительном режиме недопустимо. Заметного увеличения потока сверх номинального достигнуть не удается вследствие насыщения магнитной цепи.
Полюсное регулирование «на уменьшение потока» весьма распространено, так как оно экономично и удобно: ток возбуждения мал [Iв ≈ (1 - 5 %) Iн], размеры регулировочного реостата и мощность потерь в нем также малы.
Реостатное регулирование. При втором способе регулирования скорости изменением сопротивления rдоб реостата в цепи якоря (U = const, Iв = const) искусственные механические характеристики становятся круто падающими или «мягкими» (см. прямую 2 на рис. 3.б). Если, например, МС = const, U = const, то установившийся ток якоря и потребляемая мощность останутся прежними, а отдаваемая двигателем мощность Р = MΩ2 уменьшится. Такое реостатное регулирование связано с большими потерями мощности в цепи якоря. Поэтому оно применяется только для двигателей малой мощности.
Якорное регулирование. В двигателе независимого возбуждения можно применить и третий способ регулирования скорости вращения — безреостатное изменение напряжения на якоре. Для якорного регулирования необходим отдельный источник, напряжение которого регулируется. Это осуществляется, например, и системе «генератор — двигатель» {«система Леонарда»), изображенной на рис. 6. Здесь источником регулируемого напряжения является генератор Г независимого возбуждения, вращаемый с постоянной скоростью первичным двигателем ПД, например, асинхронным или дизельным. Обмотки возбуждения генератора и двигателя Д питаются от постоянного напряжения источника И небольшой мощности, которым может быть шунтовой генератор на валу ПД или выпрямитель переменного напряжения. Вал двигателя соединен с рабочим механизмом РМ.
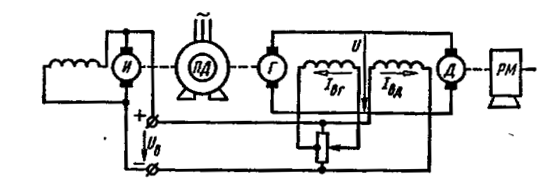 |
Рис.6. Система Генератор – Двигатель.
Изменять напряжение на якоре двигателя и, следовательно, регулировать его скорость можно, изменяя небольшой ток возбуждения генератора Г. Пусковой реостат в схеме не нужен, так как пуск начинается при пониженном напряжении, которое можно плавно повышать. Для реверсирования двигателя необходимо изменить направление тока возбуждения генератора.
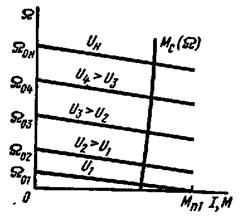 |
Искусственные механические характеристики двигателя независимого возбуждения при IB = const и различных значениях напряжения на якоре изображаются параллельными линиями (рис. 7).
Рис.7.Механические характеристики двигателя в системе Г-Д.
Если дополнительно регулировать и ток возбуждения двигателя Д, то пределы плавного изменения скорости получаются очень большими Аналогичные характеристики имеют место при регулировании напряжения на якоре с помощью управляемых электронно-ионных приборов и т. п. Поэтому двигатель независимого возбуждения широко используется в схемах автоматики в качестве исполнительного двигателя с якорным регулированием.
Электрическое торможение двигателя. Во многих случаях требуется не только быстрый пуск электродвигателя, но и его быстрый останов. Для этого двигатель переводят или в режим электромагнитного тормоза или в режим генератора. Тогда и электромагнитный момент становится тормозным:
 |
(3)
Различают три вида торможения: противовключением, генераторное динамическое и генераторное рекуперативное.
При противовключении направление тока в цепи вращающегося якоря изменяют на обратное, и оно совпадает с направлением э. д. с Механической характеристикой этого режима является продолжение прямой 2' в четвертом квадранте (см. рис. 3.б). Торможение противовключением иногда применяют, например, для медленного опускания груза, для ускорения реверса. В последнем случае инерция вращающегося якоря «гасится» в режиме тормоза, якорь останавливается, а затем начинает вращаться в обратном направлении.
При генераторном динамическом торможении отключают вращающийся якорь от сети и замыкают его на реостат (цепь возбуждения остается включенной в сеть). Возникающий генераторный электромагнитный момент тормозит вращение якоря, уменьшаясь вместе с угловой скоростью вращения. Механическая характеристика режима динамического торможения — прямая 3 во втором квадранте, проходящая через нуль (см. рис. 3.б). Динамическое торможение широко применяется в электродвигателях.
Генераторное рекуперативное торможение возникает, если к валу включенного в сеть двигателя приложить момент, направленный в сторону вращения якоря. Тогда скорость вращения якоря и э. д. с. Е начнут возрастать. При E>U ток якоря изменит направление и машина перейдет в режим генератора с отдачей (рекуперации) энергии в сеть. Механическая характеристика режима рекуперативного торможения — та же прямая 1' во втором квадранте, но проходящая через точку Ω0 — скорость вращения двигателя при холостом ходе (см. рис. 3.б). Рекуперативное торможение применяется при торможении электропоезда, трамвая или троллейбуса идущего под уклон.
|
из
5.00
|
Обсуждение в статье: Двигатели параллельного и независимого возбуждения. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы