 |
Главная |


ВЫВОД ФУНКЦИИ ПОЛОЖЕНИЯ МЕХАНИЗМА
|
из
5.00
|
ОГЛАВЛЕНИЕ
Введение _____________стр.3
1.Техническое задание__стр.4
2.Разработка и вычерчивание кинематической схемы________стр.4
3.Вывод функции положения механизма___________________стр.5
4.Определение теоретической погрешности механизма ______стр.6
5.Кинематический расчет механизма ______________________стр.6
5.1 Расчет параметров механизма (кинематический расчет)___стр.6
5.1.1 Расчет цены деления шкалы маховика ________________стр.6
5.1.2 Расчет инструментальной погрешности механизма _____стр.7
5.1.3 Определение числа делений шкалы___________________стр.8
5.1.4 Определение диаметра шкалы _______________________стр.8
5.1.5 Расчетные параметры шкалы ________________________стр.8
5.2.Определение численного значения теоретической ошибки_стр.8
Список литературы _____стр.9
ВВЕДЕНИЕ
Механизм тонкой (окончательной) наводки предназначен для прецизионного, линейного перемещения тубуса микроскопа, в одной степени свободы, для получения "резкого" (сфокусированного) изображения наблюдаемого объекта, после операции грубой (предварительной) настройки тубуса микроскопа.
Кинематическая схема (Рисунок 1) механизма тонкой наводки включает в себя: маховик со шкалой (1), винт (2), гайку винта (3), рычаг (4), тубус (5).
В соответствии с рис.1 действие механизма происходит следующим образом:
Принцип действия механизма основан на рычажной схеме углового вращения "Г-образного" рычага (4). Плавное вращение (±j1) маховика (рукоятки) со шкалой (1) обеспечивает вращение продольного микрометренного винта (2). Установленная на винте (2) гайка (3) с подвижным шарниром в вертикальной плоскости, за счет линейного перемещения (S) в горизонтальной плоскости, обеспечивает поворот "Г-образного" рычага (4) относительно шарнирно-неподвижной опоры. Поворот (j2) горизонтальной планки "Г-образного" рычага (4) приводит в движение в вертикальном направлении (в прямом и обратном направлении – h) тубус (5) микроскопа, тем самым обеспечивая точную фокусировку объекта.
Техническое задание
В соответствии с заданной кинематической схемой (Рисунок 1) спроектировать устройство тонкой наводки микроскопа, обеспечивающий погрешность функционирования 0,005 мм на длине перемещения h=0,1 мм с пределом перемещения  ±0,2 мм.
±0,2 мм.
РАЗРАБОТКА И ВЫЧЕРЧИВАНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ
Рисунок 1 – Механизм тонкой наводки микроскопа
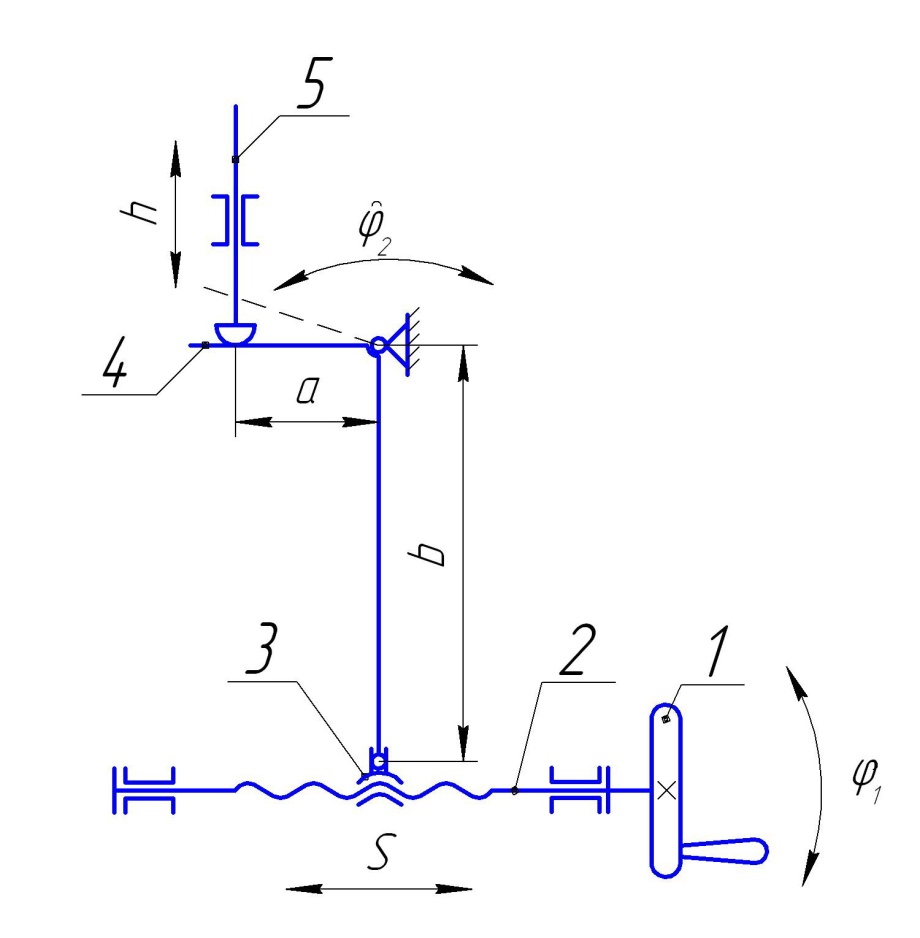
1 - маховик со шкалой;
2 - винт;
3 - гайка винта;
4 – рычаг;
5 - тубус;
ВЫВОД ФУНКЦИИ ПОЛОЖЕНИЯ МЕХАНИЗМА
Вывод общей и частных функций положения механизма точного позиционирования (функции преобразования движения ФПД) выполняется в следующей последовательности:
В качестве выходной координаты принята функция преобразования движения механизма - h. Необходимо вывести функцию h(  ).
).
При выводе ФПД используют таблицу 4.1 – Элементарные типовые механизмы([1] стр. 99 - 101).
|
из
5.00
|
Обсуждение в статье: ВЫВОД ФУНКЦИИ ПОЛОЖЕНИЯ МЕХАНИЗМА |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы