 |
Главная |


Лабораторная работа №1. Моделирование системы управления звеном робота с помощью пакетов расширения системы
|
из
5.00
|
Моделирование системы управления звеном робота с помощью пакетов расширения системы Simulink
Цель работы: изучить основные возможности подсистемы Simulink как эффективного средства математического моделирования и исследования электромеханических и мехатронных систем на примере системы управления звеном манипулятора.
Задачи лабораторной работы:
1. Изучить способ математического описания звена манипулятора промышленного робота с помощью системы дифференциальных уравнений.
2. Используя соответствующие разделы библиотеки Simulink Library реализовать Simulink-модель звена манипулятора промышленного робота.
3. Провести исследования влияния возмущающих воздействий на значения выходных параметров модели
4. Смоделировать автоматический регулятор, обеспечивающий требуемые показатели качества управления и требуемые значения выходных параметров модели звена манипулятора с учетом наличия возмущающих воздействий.
5. Провести исследования функционирования полученной системы управления, построить графики переходных процессов.
Ход работы.
Дифференциальное уравнение, описывающее динамику движения одного звена робота (рис.1) без учета влияния других звеньев, записывается в следующем виде:
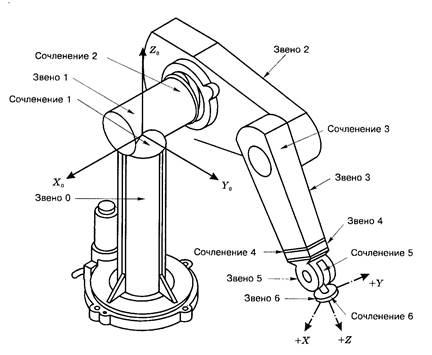
Рис.1. Схема робота
 , (1)
, (1)
где J-момент инерции звена, С – коэффициент вязкого трения в подшипниках, К- коэффициент жесткости пружины, KТ- моментный коэффициент двигателя,  - угловое положение звена, i- ток двигателя. Если двигатель управляется от источника регулируемого напряжения, то его динамика описывается следующим дифференциальным уравнением:
- угловое положение звена, i- ток двигателя. Если двигатель управляется от источника регулируемого напряжения, то его динамика описывается следующим дифференциальным уравнением:
 , (2)
, (2)
где L-индуктивность обмотки якоря двигателя, R-активное сопротивление обмотки якоря двигателя, KЕ- скоростной коэффициент двигателя.
Операторное представление уравнений (3.19 ) (3.20) запишется в виде:
 ,
,
 . (3)
. (3)
ОкноSimulink Library Browser, содержит перечень основных разделов библиотеки, каждый из которых содержит вложенные подразделы, соответствующей тематики.
Continuous – блоки для моделирования линейных звеньев;
Disontinuous – блоки для моделирования нелинейных звеньев;
Discrete – блоки для моделирования дискретных систем;
Look-Up Tables – блоки для моделирования различных функциональных преобразований;
Math Operations – математические блоки;
Model Verification – блоки для проверки правильности модели;
Model-Wide Utilites – специальные блоки для дополнительной информации о модели;
Port & Subsystems – специальные блоки для работы с большими проектами;
Signal Atributes – обработка входных сигналов;
Signal Routing – сигнальные шины, мультиплексоры, демультиплексоры и пр;
Sinks – блоки для регистрации процессов;
Sources – блоки для моделирования источников сигналов;
User-Defined Function – блоки определенные пользователем.
Пользуясь модулями, имеющимися в разделах библиотеки Simulink, подготовьте модель устройства, выполняющего интегрирование суммы постоянного и гармонического сигналов.
Для этого «перетащите» с помощью мыши нужные модули в рабочее окно, обозначенное untitle. Перенесенные из библиотеки блоки соедините линиями связи в соответствии со схемой, которая представлена на рис.2.
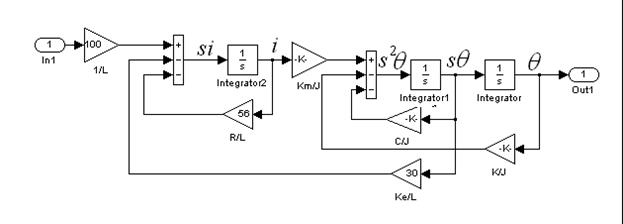
Рис.2. Simulink-модель звена манипулятора
В качестве параметров модели звена робота указать следующие величины:

Переходная и амплитудно-частотная характеристики модели представлены на рис.3. Для ее получения необходимо воспользоваться инструментом Simulink LTI-Viewer,входящем в состав пакета прикладных программ Control System Toolbox и предназначен для анализа линейных стационарных систем. С помощью данного инструмента можно легко построить частотные характеристики исследуемой системы, получить ее отклики на единичные ступенчатое и импульсное воздействия, найти нули и полюса системы и т.д.
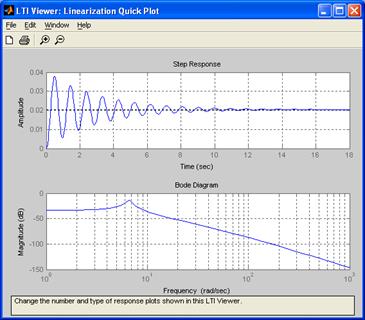
Рис. 3.
Краткий алгоритм работы с Simulink LTI-Viewer приведен ниже.
Работа с Simulink LTI-Viewer
1. Выполнить команду Tools\Control Design\Linear Analysis...окна Simulink-модели.
В результате получим:
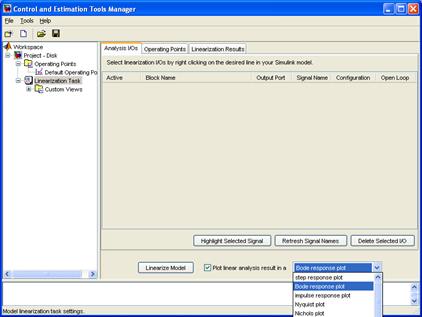
Рис.4. Окно Control and Estimation Tools Manage
В выпадающем списке можно выбрать одну из динамических характеристик и затем осуществить анализ модели кнопкой (Linearize Model).
Задание.
1. Изменяя величину активного сопротивления обмотки якоря достичь расогласования между фактической и заданной величиной углового положения звена. Построить соответствующие графики переходных характеристик.
2. Используя элементы библиотеки Simulink построить модель системы ПИД-управления звеном манипулятора промышленного робота.
3. Подобрать значения коэффицицентов усиления ПИД-регулятора, обеспечивающие условие равенства нулю величины рассогласования системы в установившемся режиме. Построить график.
4. Ведичины коэффициентов регулятора занестив таблицу.
|
из
5.00
|
Обсуждение в статье: Лабораторная работа №1. Моделирование системы управления звеном робота с помощью пакетов расширения системы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы