 |
Главная |


Реализация распределенной системы управления в сетевом режиме
|
из
5.00
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОУВПО
«ВОРОНЕЖСКАЯ ГОСУДАРСТВЕННАЯ ТЕХНОЛОГИЧЕСКАЯ АКАДЕМИЯ»
КАФЕДРА ИНФОРМАЦИОННЫХ И УПРАВЛЯЮЩИХ СИСТЕМ
РЕАЛИЗАЦИЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ ПЛК 110 В ЛОКАЛЬНО-СЕТЕВОМ И СЕТЕВОМ РЕЖИМАХ
Методические указания и задания к лабораторным работам
По курсам «Программируемые логические контроллеры»,
«Программируемые микропроцессорные контроллеры», «Микропроцессоры и микроконтроллеры»
Для бакалавров, обучающихся по направлениям
Автоматизация технологических процессов и производств (в пищевой и химической промышленности)»
Управление в технических системах»,
Дневной формы обучения

ВОРОНЕЖ
УДК 681.518 (076)
Реализация системы регулирования с использованием ПЛК 110 в локально-сетевом и сетевом режимах[Текст]: метод. указания и задания к лабораторным работам по курсу «Программируемые микропроцессорные контроллеры» / Воронеж. гос. технол. акад.; сост. В.С. Кудряшов, М.В. Алексеев, С. В. Рязанцев, А. В. Иванов. – Воронеж : ВГТА, 2010. – 32 с.
Методические указания разработаны в соответствии с требованиями ГОС ВПО подготовки бакалавра по направлениям 220700.62 – «автоматизация технологических процессов и производств», 220400.62 – «Управление в технических системах». Они предназначены для закрепления теоретических знаний дисциплин цикла ДС. Представлено описание программируемого котроллера ПЛК110, рассмотрены различные способы программирования в среде CODeSys.
Библиогр.: 6 назв.
Составители: профессор В.С. КУДРЯШОВ,
доценты М.В. АЛЕКСЕЕВ, С.В. РЯЗАНЦЕВ,
старший преподаватель А.В. ИВАНОВ
ассистенты И.А. КОЗЕНКО, А.А. ГАЙДИН
Научный редактор профессор В.К. БИТЮКОВ
Рецензент профессор Г.И. ЛОЗГАЧЕВ
(Воронежский государственный университет)
Печатается по решению
редакционно-издательского совета
Воронежской государственной технологической академии
© Кудряшов В.С., Алексеев М.В.,
Рязанцев С.В., Иванов А.В, 2010
© ГОУВПО “Воронежская
государственная технологическая
академия”, 2010
Оригинал-макет данного издания является собственностью Воронежской государственной технологической академии, его репродуцирование (воспроизведение) любым способом без согласия академии запрещается.
Цель работы: реализация распределенной системы регулирования с использованием ПЛК110, МВА8 и МВУ8, овладение навыками использования библиотек среды CoDeSys.
Ход работы
Для поддержания технологических параметров на определенном уровне или для изменения их по определенному закону в современных производствах используются автоматические системы регулирования (САР).
Типовая САР включает объект управления и управляющую часть (автоматические регуляторы и компенсаторы, промышленные контроллеры и рабочие станции).
По алгоритму (принципу) функционирования все системы можно разделить на аналоговые и цифровые.
Аналоговая САР – это система, в которой управляющее воздействие на объект вырабатывает аналоговое автоматическое устройство (аналоговый регулятор).
Цифровой САР называется система, в которой управляющее воздействие вырабатывает цифровое управляющее устройство (цифровой локальный регулятор, промышленный контроллер, рабочая станция).
Выделяют следующие архитектуры цифровых САР:
- централизованная;
- частично-распределенная;
- распределенная.
Централизованные системы управления наиболее распространенны в настоящее время. Такая система содержит центр управления (регулятор, котроллер, рабочую станцию) и расположенные в производственных помещениях датчики и исполнительные механизмы. Информационные и управляющие сигналы могут передаваться в аналоговом и цифровом виде, при этом возможно преобразование аналоговых сигналов к цифровому виду, а также обратное преобразование (рис. 1)

Рис. 1. Структурная схема централизованной САР
В частично распределенных системах управления предусматриваются дополнительные периферийные блоки управления, расположенные вблизи соответствующих технологических участков. При этом сигналы от датчиков и/или исполнительных устройств передаются к периферийному блоку управления по линиям связи (ЛС), а связь между периферийными блоками и центром управления осуществляется по определенному протоколу передачи данных, позволяющему передавать информацию в обоих направлениях по шине данных (ШД) (рис.2)

Рис. 2. Структурная схема частично-распределенной САР.
Полностью распределенные системы управления включают ряд периферийных блоков управления, соединенных с центром управления при помощи определенного протокола передачи данных. К периферийным блокам подключаются датчики и исполнительные устройства. Данная архитектура имеет ряд преимуществ по сравнению с централизованной. Так при выходе из строя центра управления некоторые функции могут выполнять периферийные блоки
С целью оценки эффективности системы регулирования необходимо провести исследование ее динамических характеристик. Исследование заключается в расчете показателей качества управления по выходным управляемым параметрам. Одной из основных динамических характеристик САР является переходной процесс.
Переходным процессом называют реакцию системы на входное воздействие (зачастую на ступенчатое изменение задания) (рис. 3).

Рис. 3. Динамическая характеристика замкнутой системы при ступенчатом изменении задающего воздействия:  - задающее воздействие;
- задающее воздействие;  - выход объекта; i – номер такта квантования
- выход объекта; i – номер такта квантования
Выделяют следующие основные показатели качества регулирования.
1. Интегрально-квадратичная ошибка:
 , (1)
, (1)
где  - общее число тактов;
- общее число тактов;  - номер такта, на котором изменяется задание регулятору;
- номер такта, на котором изменяется задание регулятору;  ,
,  - значения задающего воздействия и выхода объекта на
- значения задающего воздействия и выхода объекта на  -м такте.
-м такте.
2. Время регулирования:
 , (2)
, (2)
где  - номер такта, для которого выполняется проверяемое условие при изменении
- номер такта, для которого выполняется проверяемое условие при изменении  от до с шагом минус единица:
от до с шагом минус единица:  ;
;  %.
%.
3. Перерегулирование:
 , (3)
, (3)
где  - максимальное отклонение выхода объекта (
- максимальное отклонение выхода объекта (  ) от задания .
) от задания .
Если величина меньше задания (для апериодических процессов), то в этом случае перерегулирование равно нулю.
4. Коэффициент затухания:
 , (4)
, (4)
где  - второй максимум выхода объекта (определяется после нахождения минимального значения выхода).
- второй максимум выхода объекта (определяется после нахождения минимального значения выхода).
При отсутствии перерегулирования (  ) коэффициент затухания равен 100 % (
) коэффициент затухания равен 100 % (  =100 %).
=100 %).
5. Статическая ошибка:
 , (5)
, (5)
где  - значение выхода объекта на
- значение выхода объекта на  -м такте (установившееся значение).
-м такте (установившееся значение).
Расчет показателей качества позволяет судить не только об эффективности системы управления, но и обоснованно выбирать структуры регуляторов и сравнивать варианты схем управления для конкретного технологического объекта.
Рассмотрим реализацию распределенной системы управления.
Реализация распределенной системы управления в сетевом режиме
Для создания распределенной системы управления будем использовать контроллер ПЛК110 в качестве центра управления, в качестве периферийных блоков – модули МВА8 и МВУ8, а в качестве объекта управления – эмулятор печи ЭП10. Рабочая станция (ПЭВМ) будет использоваться для программирования и настройки всех модулей, входящих в систему (рис. 4).

Рис. 4. Схема комплекса технических средств распределенной САР
ЭП10 – эмулятор печи, предназначен для проведения экспериментальных исследований. ЭП10 выступает в качестве объекта управления и представляет собой миниатюрную печь, содержащую нагреватель мощностью 10 Вт со встроенным термометром сопротивления ТСМ 50М. Управляющим (входным) воздействием для ЭП10 является напряжение в диапазоне от 0 до 10В.
МВУ8 – модуль вывода управляющий предназначен для подключения исполнительных устройств, преобразования цифровых сигналов, в аналоговые или дискретные сигналы управления исполнительными механизмами (рис. 5).

Рис. 5. Лицевая панель МВУ8
МВУ8 может управлять исполнительными механизмами (от 1 до 8) следующих типов:
- 2-х позиционными (ТЭНами, холодильниками, вентиляторами и т.п.);
- 3-х позиционными (задвижками постоянной скорости с датчиком или без датчика положения, шиберами, поворотными заслонками, регулирующими клапанами и т.п.);
- исполнительными механизмами с аналоговым управлением;
- устройствами сигнализации или защиты оборудования;
На лицевой панели прибора расположены светодиоды:
- «выходы 1 ...8», сигнализирующие постоянным свечением о включении дискретного выходного элемента и миганием о включении аналогового выходного элемента;
- «RS-485», сигнализирующий миганием о приеме данных прибором;
- «питание», сигнализирующий о включении питания;
- «авария», сигнализирующий об отсутствии обмена по сети RS-485 в течение недопустимо долгого времени.
Основные технические характеристики МВУ8 приведены в табл 1.
Таблица 1.
Основные технические характеристики МВУ8
| Наименование | Значение |
| Напряжение питания переменного тока | 90...264 В частотой 47...63 Гц |
| Потребляемая мощность | не более 12 ВА |
| Количество выходных элементов | |
| Интерфейс связи с компьютером | RS-485 |
| Протокол связи, используемый для передачи информации | ОВЕН; ModBus-RTU; ModBus-ASCII; DCON |
| Степень защиты корпуса | IP20 |
| Габаритные размеры прибора | 157x86x57 мм |
| Масса прибора | не более 0,5 кг |
Для настройки распределенной системы регулирования откройте проект в среде CoDeSys на языке CFC, созданный для лабораторной работы №2 или заново назначьте ПЛК мастером сети и подключите к нему модуль МВА8.
Датчик температуры, встроенный в эмулятор печки подключен к первому входу МВА8. Поэтому для работы системы регулирования необходимо организовать опрос первого канала МВА8 (см. лаб. раб. №2).
Затем необходимо подключить модуль МВУ8 для этого в структуре дерева “PLC110_32”щелкаем правой клавишей по пункту “Modbus (Master) [VAR]” и выбираем пункт “Append Subelement”, а затем подпункт “Unuversal Modbus device” (рис.6)

Рис. 6. Подключение модуля МВУ8
Во вкладке “Module Parameters” необходимо задать следующие параметры:
Для параметра Module Slave Address (Адрес ведомого устройства) указываем адрес модуля в сети – 16.
Для параметра Work Mode (режим работы прибора) выбираем из списка значение By poll time (режим работы по времени).
Устанавливаем время опроса Polling time ms (Период опроса устройства, в мс) – 1000 (рис.7).

Рис. 7. Настройка сетевых параметров МВУ.
Определяем тип подключаемого модуля. Для этого в структуре дерева “PLC110_32” щелкаем правой клавишей мыши на пункте “Unuversal Modbus device [VAR]”, затем выбираем пункт “Append Subelement” и выбираем подпункт “Register input module” (рис.8)

Рис. 8. Определение типа подключаемого модуля
Проконтролировать появление в пункте “Universal Modbus Device” подпункта “Register input module”.
Далее для пункта “Register output module” во вкладке “Module Parameters” необходимо указать канал МВУ8, на который необходимо выдавать управляющее воздействие.
Номера выходных каналов МВУ8 нумеруются начиная с нулевого. ЭП10 подключен к шестому выходу МВУ8, следовательно, в качестве номера канала необходимо указать значение 5. Для параметра “Command” (Команда) необходимо задать значение “Write multiply registers” (Запись байтов) (рис. 9).
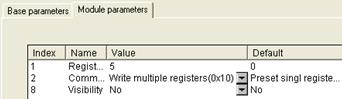
Рис. 9. Определение номера выходного канала МВУ8 для выдачи управляющего воздействия
Для проверки правильности подключения модуля МВУ8 необходимо реализовать следующую программу на языке CFC: объявим входную переменную х1типа WORD и подключим к ней выходную переменную такого же типа x2. Переменную x2свяжем с физическим выходом МВУ8, для чего в программном коде возле имени переменной необходимо указать следующий адрес:AT %QW6.2.0.0. Переведите галетный переключатель на лицевой панели шкафа в верхнее положение и запустите программу в среде CoDeSys на выполнение. Задайте значение переменной x1, равное 1000 (рис. 10).
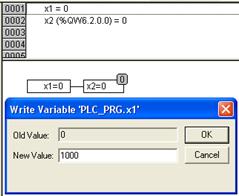
Рис. 10. Проверка работоспособности МВУ8 в сетевом режиме
После этого должен послышаться щелчок срабатывания реле МВУ8 и загорится индикатор шестого номера канала МВУ8. Кроме того, должен загореться индикатор ЭП10, сигнализирующий о поступлении управляющего воздействия на печь. Для предотвращения перегрева печи, обнулите значение переменной x1.
Далее необходимо реализовать управляющую часть системы. Среда CoDeSys имеет значительное число встроенных библиотек, которые можно использовать для создания систем управления, реализующих различные законы регулирования. Создадим систему управления, реализующую пропорционально-дифференциальный (ПД) закон регулирования. Для этого необходимо подключить в проект библиотеку, содержащую ПД-регулятор.
Вначале добавим окно менеджера библиотек (Library Manager): Для этого необходимо поставить галочку напротив подпункта Library Manager пункта основного меню Window(рис. 11).

Рис.11. Добавление окна менеджера библиотек в проект
В верхнем левом поле добавленного окна вызовем контекстное меню, нажатием правой клавишей мыши на свободном пространстве, и выберем пункт Additional Library… (рис. 12).

Рис.12. Добавление новой библиотеки в проект
Далее необходимо указать путь к файлу библиотеки, он расположен по адресу: C:\ Program Files \ 3S Software \ CoDeSys V2.3\ Library \ Util.lib. Нажав кнопку открыть, осуществите подключение библиотеки в проект (рис. 13).

Рис. 13. Добавление библиотечного файла Util.lib
Проконтролируйте подключение библиотеки в верхнем поле окна Library Manager.
В графическом редакторе проекта PLC_PRG вызовите функциональный блок ПД-регулятора, для этого вначале вынесите стандартный блок AND и измените его имя на PD (рис. 14).

Рис. 14. Функциональный блок PD библиотеки Util.lib
Для корректной работы проекта вместо трех вопросительных знаков введите любое имя переменной и, нажав, клавишу Enter проконтролируйте в окне объявления переменой (Declare Variable), что бы ее тип совпадал с именем функционального блока.
Функциональный блок PDбиблиотеки Util.lib реализует ПД-закон регулирования:
 ,
,
где Y_OFFSET – стационарное значение;
КР – коэффициент усиления;
TV – постоянная дифференцирования;
e(t) – сигнал ошибки (SET_POINT∙ACTUAL);
Y – выход регулятора.
В табл. 2 указаны наименования всех входов и выходов данного блока, а также их тип и описание.
Таблица 2
|
из
5.00
|
Обсуждение в статье: Реализация распределенной системы управления в сетевом режиме |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы