 |
Главная |


ПРОЦЕССЫ ВЗАИМОДЕЙСТВИЯ РАБОЧИХ ОРГАНОВ
|
из
5.00
|
С ГРУНТОМ
Несмотря на большое многообразие конструкций рабочих органов основных типов строительных и дорожных машин, большинство из них можно представить в виде отдельных клиньев или сочетаний клиньев с различными элементарными профилями. Так, например, рабочие органы автогрейдеров, бульдозеров, грейдер-элеваторов можно представить в виде клина с отвальной поверхностью, рыхлителя—в виде клина со стойкой, а скреперов и экскаваторов — в виде клина с ковшом, который может иметь зубья. Рабочие органы криволинейной формы, например дисковый нож грейдер-элеватора или ковши с полукруглым днищем погрузчиков представляют, собой совокупность клиньев и элементарных профилей.
При помощи рабочих органов выполняют операции, объединяемые общим названием—копание грунтов. Процесс копания состоит из резания— отделения части грунта от основного массива, перемещения его вдоль или впереди рабочего органа—отвала или ковша и перемещения грунта внутри ковша. Аналогичные операции, связанные с переработкой сыпучих материалов ковшами погрузчиков или кранов, снабженных ковшами грейферного типа, составляют процесс зачерпывания материалов.
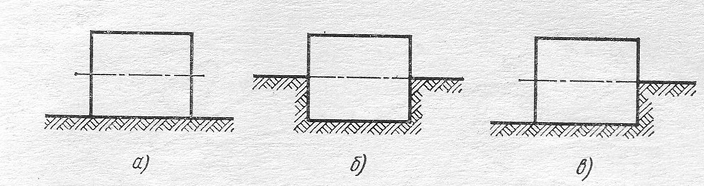
Рис. 12. Виды резания:
а- свободное; и — блокированное; в — полублокированное
Самостоятельную группу представляют рабочие органы и оборудование, применяемые для уплотнения грунтов и материалов. Процесс уплотнения связан с воздействием на грунт или материал внешних нагрузок статического, ударного или вибрационного характера, распределенных по некоторой площади.
Копание грунтов относится к числу наиболее важных технологических процессов в строительстве. Характер его протекания и возникающие при этом сопротивления зависят от двух основных факторов: физико-механических свойств грунтов и конструктивных параметров рабочих органов.
Отделение грунта от массива при помощи рабочего органа, которое условно называют резанием, практически в чистом виде не встречается, так как оно всегда сочетается с подъемом или отодвиганием грунта, формированием из него стружки и перемещением ее по рабочему органу, образованием призмы волочения из грунта, возникновением давления на срезаемый грунт и т. д. Тем не менее, для понимания физической картины взаимодействия рабочего органа с грунтом этот процесс рассматривают отдельно.
Различают свободное (рис. 12, а), блокированное (рис. 12,6) и полублокированное (рис. 12, е) резание грунта. В первом случае рабочий орган взаимодействует с грунтом только режущей кромкой, передней и задней поверхностью клина. Во втором случае в работе участвуют также обе боковые стороны, а в третьем — одна из них.
При свободном резании клин сначала уплотняет грунт перед собой (рис. 13, а). При достижении предельного напряженного состояния грунта клин сдвигает его по поверхности, наклоненной к направлению движения под углом Ψ1(рис. 13,6), и перемещает по своей лобовой поверхности, преодолевая при этом не только сопротивление грунта сдвигу и перемещению по лобовой поверхности, но также и силы трения, возникающие на задней поверхности клина из-за остаточных деформаций грунта.

Рис. 13. Свободное резание грунта клином:
а — начальное положение; б — положение в момент скола
Характер деформации грунта зависит от его связности, влажности и плотности (рис. 14). Практически на процесс резания влияют параметры рабочего органа, обеспечивающего передачу грунта в ковш или на отвальную поверхность. Для обеспечения износостойкости угол резания клина у0 для большинства рабочих органов всегда принимают больше оптимального. Современные рабочие органы в большинстве случаев обеспечивают периодический скол грунта (рис. 14,а,б) или его сгруживание (рис. 14, г).

Рис. 14. Характер деформации грунта:
а — средней связности и влажности; б — связного сухого; в — связного влажного;
г — несвязного сухого
Существуют различные теории резания грунтов, базирующиеся на основных положениях механики сплошной среды, теориях упругости и прочности с использованием экспериментальных данных по грунтам и учетом параметров рабочих органов и их соотношений. Трудности, связанные с получением необходимых физико-механических показателей грунтов, широкий диапазон изменений грунтовых условий, а также сложность существующих зависимостей и формул для определения сопротивлений резанию обусловили применение этих теорий в основном для исследовательских целей.
По таким же причинам в практических расчетах мало используют теорию резания грунтов, базирующуюся на экспериментальных исследованиях процесса резания и полностью учитывающую его физическую сущность, физико-механические показатели грунтов, параметры, размеры рабочих органов и соотношения между ними.
Наибольшее применение в настоящее время получило определение действующих сопротивлений на рабочем органе с помощью эмпирических формул и зависимостей, в которых используются только основные параметры соотношения размеров рабочих органов, удельные показатели грунта и условий его разработки. В этом случае рабочий орган в виде клина, который производит резание, характеризуется углом резания у0, задним углом θ и шириной b (см. рис. 13, а). Клин перемещается в горизонтальном направлении без изменения глубины резания h.
Сила сопротивления перемещению клина Pr при резании грунта складывается из силы сопротивления грунта отделению от массива и деформации Р0, силы тяжести грунта передней грани клина Gr, сопротивления трения этого грунта по передней грани Grcosy0\μ1 (здесь μ1 —коэффициент трения между грунтом и клином) и сопротивления трения грунта по задней грани клина обусловленного пластической деформацией грунта (рис. 15, а).

Если принять, что на заднюю грань грунт после прохода режущей кромки действует равномерно с давлением р0, то последнее сопротивление можно определить как произведение p0F0 μ1. где F0 — площадь опорной площадки на задней грани.
Горизонтальную Рр и вертикальную Рв составляющие силы сопротивления перемещению клина Pr можно определить как сумму проекций всех сил сопротивления на соответствующие оси X и Z. Из-за сложности экспериментального определения отдельных сил сопротивления и отдельных характеристик грунтов для нахождения горизонтальной составляющей силы сопротивления резанию обычно используют удельное сопротивление резанию соответствующее силе, необходимой для свободного резания и приходящейся на единицу площади поперечного сечения срезаемого грунта:
Рр = kpbh,
где b — ширина клина; h — глубина резания.
Удельное сопротивление резанию кр зависит от физико-механических свойств грунта, параметров режущей части рабочего органа и состояния ее поверхности. Оно определяется экспериментально для основных, наиболее распространенных грунтов и каждого типа рабочего органа. Значения кр Для разных рабочих органов Приведены в соответствующих разделах.
Экспериментально установлено, что оптимальный угол резания у0 для большинства грунтов составляет 20—30°, а задний 0 = 7 ÷10°.
Для обеспечения необходимых эксплуатационных качеств, прочности и долговечности режущей части угол резания обычно принимают больше его оптимального значения, хотя с его увеличением на каждый градус удельное сопротивление возрастает на 1 —1,2%. Так, для бульдозеров угол резания чаще всего выбирают равным 55°, автогрейдеров 30—50°, скрепер ров 30—35°, экскаваторов 20 – 35.
По этим же причинам кр определяют при практически используемы: углах у0 и θ, а также с учетом качества поверхности режущей части рабе чего органа.
Вертикальную составляющую Рв результирующей силы сопротивления при свободном резании грунта определяют экспериментально непосредственным измерением или по углу наклона результирующей, который не обходимо знать для тяговых и других расчетов машин.
Практически свободное резание встречается редко. Удельное сопротивление кр при блокированном резании определяют с учетом износа рабочей органа, который может вызывать рост сил сопротивления резании в 1,5—3 раза, несоответствия угла резания оптимальному значению и нарушения соотношения между глубиной и шириной резания. При этом общее сопротивление блокированному резанию составляет
Робщ=Ррφр + 2Рб.ср+Рд ,
где Рр — сила сопротивления свободному резанию при оптимальном для данного грунта угле резания (см. рис. 14); φр — коэффициент, учитывающий отличие угла резания от оптимального значения; Рб— сила сопротивления разрушению в боковых расширениях прорези (рис. 15,6; точки обозначают, что силы действуют перпендикулярно плоскости чертежа); Рб.ср — сила сопротивления резанию боковыми поверхностями клина (рис. 15, в)Рд— дополнительная сила сопротивления резанию, возникающая при изнашивании рабочего органа (рис. 15,6).
Сила сопротивления Рб пропорциональна площади сечения бокового расширения, мало зависит от угла резания и определяется в основном прочностью грунта; при обычных для землеройных машин отношениях h/b < 0,5 ее определяют без учета ширины клина:
Po=1/2К2б.рh2ctgΨkб
Где kб.р. —коэффициент глубины бокового расширения прорези, равный дня разных грунтов 0,5—0,95; Ψ— угол скола бокового расширения равный для большинства грунтов 30—45° (см. рис. 15);kб - удельная сила разрушения грунта в боковых расширениях, приходящаяся на единицу площади поперечного сечения.
Удельная сила разрушения kб в боковых расширениях для рабочих органов типа рыхлительных зубьев с отношением h/b >2 — 3 превышает аналогичный показатель для рабочих органов типа отвала бульдозера или автогрейдера с h/b < 0,5 в несколько раз, что объясняется разницей в физической картине процесса разрушения. При рыхлении существенная дол разрушаемого грунта вдавливается в массив.
Сила сопротивления резанию боковыми поверхностями клина практически мало зависит от угла и ширины резания. Она пропорциональна глубине резания и определяется прочностью грунта:
Рб.ср=Kб.ср.L б.ср.φр-тина при оптимальном угле резания, отнесенная к единице глубины резания; L б.ср = h(l - Kб.ср ) - разница между глубиной резания и глубиной бокового расширения прорези (см. рис. 15, в).
Физический процесс разрушения грунта в этом случае лишь условно называют резанием, поскольку боковые грани рабочих органов обычно не имеют заострений.
Удельная сила сопротивления Kб.ср также резко различается для рабочих органов с h/b >2÷3 и h/b < 0,5.
Дополнительная сила сопротивления резанию Ра, вызываемая износом рабочего органа, зависит от формы площадки износа и прочности грунта {см. рис. 15,6). Затупленный клин движется в направлении Х-Х. Вершина затупленной части Б1 разделяет отделяемый от массива грунт на два потока, из которых нижний при движении клипа частично выдавливается вверх, а частично вдавливается криволинейной поверхностью вниз за линию Х-Х.
Пренебрегая изменением угла резания над точкой Ь1 и перенеся поверхность А, В, вниз (линия Л Б) на величину пластической деформации грунта, вызывающей сопротивление трения грунта по задней грани, дополнительное сопротивление резанию Рд и вертикальное сопротивление отпора Рв можно определить по следующим выражениям:
Рд = кп (zb + μ1xb); (6)
Рв = хЬ (к п+ к0), (7)
где кп— предельная несущая способность грунта; z — глубина вдавливания клина; х - глубина внедрения клина; к0 — удельное сопротивление отпора грунта, приходящееся на единицу площади горизонтальной проекции площадки износа.
Характер износа, режущей части клина зависит от многих факторов (диапазона изменения угла резания, вида работ и грунтов и т. д.), поэтому влияние его различно не только в количественном, но и в качественном отношении, т. е. Рв может действовать как вверх, так и вниз. По этим причинам формулы (6) и (7) корректируют с учетом отношения h/b и несоответствия угла резания оптимальному значению. Значения к0 для рабочих органов с h/b < 0,5 резко отличаются от значений при h/b >2÷3.
Так как удельные сопротивления определить очень сложно, в большинстве случаев находят общую силу сопротивления копанию с учетом всех физических процессов, происходящих на рабочем органе машины, не определяя отдельно силу сопротивления резанию (в общем балансе сил сопротивления копанию сила сопротивления резанию грунта при устойчивом процессе работы составляет для многих машин 10 — 30%).
Такие процессы, как формирование стружки из отделенного от массива грунта при действии дополнительной силы со стороны призмы волочения и ее перемещение по отвальной поверхности бульдозера и автогрейдера или в толще грунта, ранее набранного в ковш скрепера, требуют наибольших затрат энергии. Кроме того, они влияют на сам процесс резания грунта и его перемещения, создавая дополнительную силу и изменяя удельные сопротивления.
Практически для рабочих органов всех типов процессы резания и копания разделить можно лишь условно.

Рис. 16. Силы действующие при копании бульдозерным отвалом
Силу сопротивления ко палию Рк, действующую горизонтальном направлении, определяют в зависимости от площади вырезаемого грунта hb и удельного сопротивлений копанию кп полученного при стандартном (принятом) исполнении конструкции и оптимальное, угле резания для данного рабочего органа и грунтовых условий, а также устойчивом процессе копания (рис. 16). Силу сопротивления копанию определяют по формуле
Рк = кφ кк hb ,
где кφ — коэффициент, учитывающий- несоответствие утла резания оптимальному значению.
Глубина резания при этом должна быть в определенных пределах, обеспечивающих нормальный ход процесса копания. Последнее является необходимым условием, так как процессы копания при малой и большой глубине резания резко отличаются.
Вертикальную (нормальную) силу сопротивления копанию Рн чаще всего определяют по углу наклона v результирующей а силы Рr к силе сопротивления копанию Рк который получают для типовых условий при! определении кк:
Рн = Рк tgv.
Значения Рк, Рн , v и расстояния а от условной точки приложения результирующей сил сопротивления копанию до базы отсчета необходимо знать для расчетов рабочих органов и механизмов управления на долго! вечность, определения центра давления на ходовую часть машины в процессе работы и т. д.
Для прочностных расчетов используют такие параметры, как масса машины, ее тяговое усилие Тк, возможные по опрокидыванию усилия выглубления Рв и заглубления Рз.
Удельное сопротивление копанию кк обычно определяют для типовых грунтовых условий, в которых рабочий орган данной машины работав наибольшую часть времени. Например, для бульдозера стандартными типовыми условиями является работа на суглинке с объемной массой 1,8—2,0 г/см3 и влажностью 10 20%. Значения кк для других грунтов условий и влажности учитывают коэффициентами. Удельное сопротивление Кк существенно неодинаково не только для разных рабочих органов но также и для одного и того же рабочего органа при различном состоянии грунта, например, при разной влажности. Коэффициентами можно учитывать отдельные конструктивные особенности рабочих органов. Значения для отдельных рабочих органов и грунтовых условий приведены в соответствующих разделах.

Рис. 17. Силы, действующие при резании грунта косым клином
Силы сопротивления резанию, действующие на косой трехгранный клин (нож автогрейдера, грейдер-элеватора), можно получить, если все силы сопротивления на передней грани свести к равнодействующей нормальных сил сопротивления N и силе трения μ1N(рис. 17, а). Силы сопротивления на нижней грани клина при этом можно не рассматривать, так как они не имеют принципиальных отличий от сил, действующих на простой клин.
Положение косопоставленного клина при резании определяет угол σ установки его в вертикальной и угол φ в горизонтальной плоскости по отношению к направлению движения ОХ.
Частица грунта поднимается на переднюю грань ABC клина под углом 90° — Ψ1 к оси- X, а не по нормали к режущей кромке АС. На передней грани клина линия действия сил трения μ1N образует с нормалью BD к режущей кромке угол ω.
Из геометрических соотношений получим

аналогично

Составляющую Rx сил сопротивления резанию по оси X, определяющую необходимое для движения клина усилие, получают в виде суммы проекций сил N и μ1N на ось X:

Силы сопротивления, действующие нормально режущей кромке и вдоль ее, также можно найти в виде суммы проекций сил N и μ1N на эти
направления:

Для определения силы сопротивления, действующей по оси Y, используют графическое построение (рис. 17,6). При этом

Силу сопротивления резанию Rz действующую по оси Z, находят проектированием сил N и μ1N на эту ось (см. рис. 18, а):

Определив Rx, Ry и R, и отношения Ry/Rx и RzRx, можно найти результирующую сил сопротивления R, углы ее наклона и условную точку приложения.
Для определения сил Rp резания и Rk копания также используют удельное сопротивление резанию Kр и копанию Kk, как и для простого клина с необходимыми поправочными коэффициентами. В этом случае другие составляющие сопротивления находят по углам, определяемым; опытным путем для разных грунтов.
|
из
5.00
|
Обсуждение в статье: ПРОЦЕССЫ ВЗАИМОДЕЙСТВИЯ РАБОЧИХ ОРГАНОВ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы