 |
Главная |


Синтез структурных групп с помощью структурных формул
|
из
5.00
|
Строение механизмов
Какотмечалось выше, структура любой технической системы определяется функционально связанной совокупностью элементов и отношений между ними. При этом для механизмов под элементами понимаются звенья, группы звеньев или типовые механизмы, а под отношениями подвижные (кинематические пары) или неподвижные соединения. Поэтому под структурой механизма понимается совокупность его элементов и отношений между ними, т.е. совокупность звеньев, групп или типовых механизмов и подвижных или неподвижных соединений. Геометрическая структура механизма полностью описывается заданием геометрической формы его элементов, их расположения, указания вида связей между ними. Структурная схема - графическое изображение механизма, выполненное с использованием условных обозначений рекомендованных ГОСТ (см. например ГОСТ 2.703-68) или принятых в специальной литературе, содержащее информацию о числе и расположении элементов (звеньев, групп), а также о виде и классе кинематических пар, соединяющих эти элементы. В отличие от кинематической схемы механизма, структурная схема не содержит информации о размерах звеньев и вычерчивается без соблюдения масштабов. (Примечание: кинематическая схема - графическая модель механизма, предназначенная для исследования его кинематики).
Задачей структурного анализа является определение параметров структуры заданного механизма - числа звеньев и структурных групп, числа и вида кинематических пар, числа подвижностей (основных и местных), числа контуров и числа избыточных связей.
Задачей структурного синтеза является синтез структуры нового механизма, обладающего заданными свойствами: числом подвижностей, отсутствием местных подвижностей и избыточных связей, минимумом числа звеньев, с парами определенного вида (например, только вращательными, как наиболее технологичными) и т.п.
Степень подвижности механизма - число независимых обобщенных координат однозначно определяющее положение звеньев механизма на плоскости или в пространстве.
Связь - ограничение, наложенное на перемещение тела по данной координате.
Избыточные (пассивные) - такие связи в механизме, которые повторяют или дублируют связи, уже имеющиеся по данной координате, и поэтому не изменяющие реальной подвижности механизма. При этом расчетная подвижность механизма уменьшается, а степень его статической неопределимости увеличивается. Иногда используется иное определение: Избыточные связи - это связи, число которых в механизме определяется разностью между суммарным числом связей, наложенных кинематическими парами, и суммой степеней подвижности всех звеньев, местных подвижностей и заданной (требуемой) подвижностью механизма в целом.
Местные подвижности - подвижности механизма, которые не оказывают влияния на его функцию положения (и передаточные функции), а введены в механизм с другими целями (например, подвижность ролика в кулачковом механизме обеспечивает замену в высшей паре трения скольжения трением качения).
Структурный синтез простых и сложных механизмов с помощью структурных групп.Слайд № 1
Наиболее распространенным методом создания механизмов с замкнутыми кинематическими цепями в настоящее время является метод присоединения к элементарным механизмам структурных групп или групп Accypa. Этот метод образования механизмов впервые был предложен Л.В. Ассуром для так называемых плоских замкнутых цепей, заканчивающихся -во всех направлениях поводками с вращательными или поступательными кинематическими парами.
Кинематические цепи, обладающие нулевой подвижностью относительно внешних кинематических пар и не распадающиеся на более простые цепи, удовлетворяющие этому условию, получили название структурных групп или групп Ассура.
Структурную формулу любого простого или сложного механизма. образованного с помощью структурных групп, можно представить следующим образом:
 Слайд№ 2 (3.1)
Слайд№ 2 (3.1)
где W - подвижность синтезируемого механизма;  - подвижность элементарного механизма;
- подвижность элементарного механизма;  - подвижность структурной группы; m - число элементарных первичных механизмов; n - число присоединяемых структурных групп; i=1, 2, ... m; j =1, 2, ... n.
- подвижность структурной группы; m - число элементарных первичных механизмов; n - число присоединяемых структурных групп; i=1, 2, ... m; j =1, 2, ... n.
Так как подвижность присоединяемых (ой) структурных(ой) групп(ы) равна нулю, то  , а значит, (3.1) эквивалентно выражению:
, а значит, (3.1) эквивалентно выражению:
 (3.2)
(3.2)
Анализ (3.2) показывает, что присоединяемые к элементарному механизму структурные группы не влияют на подвижность простого или сложного механизма. Они только изменяют его структуру и законы движения звеньев.
Структурная группа, существующая в трехподвижном пространстве и имеющая только одноподвижные кинематичесие пары, в соответствии с (3.7) должна состоять из двух звеньев и трёх одноподвижных кинематических пар. Эта группа носит название диады Сильвестера или двухповодковой группы и приведена на рис. 3.3, а.
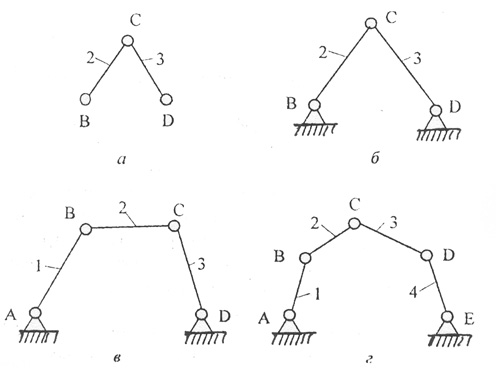
Рис. 3.3. Двухповодковая структурная группа и простые механизмы на её основе:
а - диада Сильвестера; б - статически определимая ферма, в - одноподвижный четырехзвенник;
г - двухподвижный пятизвенник; 1, 2 ... 4 ~ подвижные звенья; А, В ... Е - кинематические пары
Если двухповодковую группу связать шарнирами В и D со стойкой, то получим элементарную статически определимую ферму (рис.3.3, 6).
Присоединив эту двухповодковую структурную группу к одному неподвижному и одному или двум подвижным звеньям 1 и 4 элементарных механизмов, получим простой механизм с одной (рис.3.3, в) или двумя (рис.3.3, г) степенями свободы.
Синтез структурных групп с помощью структурных формул
Анализ (3.6),...,(3.10) показывает, что, задаваясь различными кинематическими парами и звеньями для каждого пространства, можно синтезировать множество структурных групп.
Рассмотрим синтез структурных групп с помощью структурных формул на примере наиболее распространенных в технике механизмов, которые существуют в трехмерном (М=3) трехподвижном (П=3) пространстве, допускающем два поступательных перемещения вдоль осей X и Y и одно вращательное вокруг оси Z.
Структурная формула групп Ассура для механизмов, существующих в трехподвижном пространстве, имеет вид (3.7)
Уравнение (3.7) для структурных групп в трехподвижном пространстве, можно переписать в виде:
 (3.11)
(3.11)
Решив (3.11) относительно числа одноподвижных кинематических пар, получим
 (3.12)
(3.12)
Равенство (3.12) устанавливает связь между числом кинематических пар и подвижных звеньев, входящих в структурную* группу. Так как число звеньев и кинематических пар в группе Ассура может быть только целым числом, условию (3.12) могут удовлетворять следующие сочетания чисел звеньев и кинематических пар
| n | … | ||||
| P1 | … |
Первое из этих соответствий между подвижными звеньями и кинематическими звеньями реализуется в рассмотренной диаде Сильвестера (рис. 3.3, а).
 |
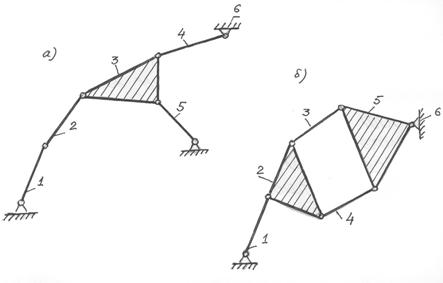
Второе сочетание чисел звеньев (n=4) и кинематических пар (
 ) позволяет реализовать две различные структурные группы. Эти группы приведены на рис. 3.4.
) позволяет реализовать две различные структурные группы. Эти группы приведены на рис. 3.4.
Рис. 3.4. Структурные группы, содержащие четыре подвижных звена
и шесть кинематических пар:
а - структурная группа с тремя внешними кинематическими пирами;
б - структурная группа с двумя внешними кинематическими парами.
 |
Присоединение структурных групп, изображенных на рис.3.4, а,б, к элементарным механизмам и стойке приводит к образованию следующих простых механизмов (рис.3.5).
Рис.3.5
Заметим, что в механизме (рис.3.5, а) в зависимости от выбора начального звена можно выделить две или одну структурные группы. Действительно, если в качестве начального звена выбрать звено 1, то структурная группа будет иметь вид, изображенный на рис. 3.4, а. Однако если за начальное звено взять, например, звено 5, то в механизме (рис.3.5) можно выделить две двухповодковые структурные группы (диады Сильвестера).
|
из
5.00
|
Обсуждение в статье: Синтез структурных групп с помощью структурных формул |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы