 |
Главная |


ВТОРОЙ ПОДХОД К РАСЧЕТУ
|
из
5.00
|
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
Высшего профессионального образования
«Владимирский государственный университет
Имени Александра Григорьевича и Николая Григорьевича Столетовых»
(ВлГУ)
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
Методические указания
К выполнению курсового проекта
По дисциплине «Технические средства автоматизации и управления»
Для студентов направления 220700
Составитель:
доцент каф. АТП
Назаров А.А.
Владимир 2012
ВВЕДЕНИЕ
Курсовой проект является заключительным этапом обучения студентов по дисциплине "Электромеханические системы" и имеет целью углубление и закрепление теоретических знаний, полученных студентами при изучении дисциплины, а также приобретение практических навыков при решении конкретной технической задачи, развитие навыков самостоятельной работы с технической литературой в ходе анализа и расчетов, приобретение творческих навыков в использовании ЭВМ как составного элемента системы автоматизированного проектирования (САПР), получение практических навыков в оформлении технической документации в соответствии с единой системой конструкторской документации (ЕСКД)
Содержание курсового проекта составляют вопросы автоматизации управления исполнительными двигателями постоянного тока как составной части электропривода.
Электропривод (ГОСТ 16593-93)- это электромеханическая система, состоящая из электродвигательного устройства, преобразовательного устройства, передаточного устройства (редуктора), управляющего устройства и предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. Электродвигатель является основной частью электропривода. Современный электропривод всегда является автоматизированным. Как правило, все процессы, связанные с пуском, остановкой, регулированием частоты вращения двигателя, обеспечиваются средствами автоматики.
Целью курсового проекта по данной теме является определение параметров и характеристик переходного процесса заданного двигателя постоянного тока независимого возбуждения при автоматизации пуска и торможения с последующей разработкой схемы автоматического управления. Выполняемый объем работ является частью этапа эскизного проектирования. При этом считается, что на основании технического задания, выданного заказчиком, на этапе технического предложения разработчиком принята схема автоматизации пуска за счет ограничения пусковых токов с помощью пусковых резисторов и схема автоматизации останова способом динамического торможения.
Расчет сопротивлений резисторов при пуске и динамическом торможении представляет собой первую часть курсовой работы. Вторая часть заключается в расчете переходных процессов при пуске и динамическом торможении, т.е. определение времени переходного процесса и нахождение зависимостей частоты вращения и тока якоря от времени.
Первая и вторая части сначала выполняются вручную, а затем проводится расчет на ЭВМ. При расчете переходных процессов вручную пренебрегают индуктивностью якорной обмотки, а при расчете на ЭВМ эту индуктивность учитывают, и переходной процесс определяется более точно.
Третья часть проекта состоит в разработке принципиальной электрической схемы автоматического управления пуском и торможением заданного двигателя постоянного тока, а также из подробного описания ее работы.
Тему курсового проекта и номер варианта (в соответствии с номером по списку в журнале) указывает преподаватель.
Курсовая работа оформляется в соответствии с требованиями к текстовым документам (ГОСТ 2.105-92) и отчетам о научно-исследовательской работе ГОСТ 7.32-91).
1. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТОВ
В исходных данных (табл.1) указаны следующие основные технические данные согласно [1,2]. Индуктивность якорной обмотки определена по ориентировочной формуле.
1. Р2Н - номинальная мощность на валу двигателя (кВт).
2. UН - номинальное напряжение (В).
3. IЯН - номинальный ток якоря (А).
4. nН - номинальная частота вращения (об/мин).
5. R - сопротивление обмотки якоря (Ом).
6. L - индуктивность обмотки якоря (Гн).
7. J - момент инерции якоря (кг.м2).
Кроме того, для выполнения курсового проекта указывается:
1. Отношение момента сопротивления нагрузки к номинальному на валу двигателя а (%).
2. Тип схемы управления: Т, С, В - соответственно управление в тока, скорости, времени.
Предполагается, что момент сопротивления нагрузки представляет собой момент сухого трения, т.е. не зависит от величины частоты вращения и изменяет свой знак при изменении направления вращения.
При расчетах и дальнейшем анализе разработанной системы управления используется математическая модель ДПТ в форме:
 (1)
(1)
где  - индуктивность якоря;
- индуктивность якоря;  - ток якоря;
- ток якоря;  - активное сопротивление цепи якоря;
- активное сопротивление цепи якоря;  - дополнительное сопротивление, включенное в цепь якоря;
- дополнительное сопротивление, включенное в цепь якоря;  - угловая скорость якоря;
- угловая скорость якоря;  - приведенный момент инерции якоря;
- приведенный момент инерции якоря;  - момент трения в коллекторе и подшипниках;
- момент трения в коллекторе и подшипниках;  - момент нагрузки;
- момент нагрузки;  - единый электромагнитный коэффициент, определяемый конструкцией данного двигателя; U– питающее напряжение.
- единый электромагнитный коэффициент, определяемый конструкцией данного двигателя; U– питающее напряжение.
Моменты трения с достаточной точностью можно считать изменяющимся по закону:
 (3)
(3)
Момент нагрузки, в принципе может изменяться по любому закону, но в данном случае этот закон примем в виде:
 (2)
(2)
2. ОПРЕДЕЛЕНИЕ НОМИНАЛЬНЫХ ПАРАМЕТРОВ
По исходным данным определяют ряд величин, которые используются в дальнейшем расчете:
1. Номинальная частота вращения в системе СИ
 =
=  nH
nH  .
.
2. Единый электромагнитный коэффициент
 эм =
эм = 
3. Номинальный электромагнитный момент
Мн = kЭМIЯН 
4. Номинальный момент на валу двигателя
 М2Н =
М2Н = 
5. Момент потерь
М0 = МТ=МН-М2Н
6. Полный момент сопротивления
Мс=МТ+МНГ= 
7. Ток якоря, соответствующий моменту сопротивления Мс
 =
= 

8. Частота вращения двигателя при токе 


Таблица 1
Варианты заданий и исходные данные к проекту
| Вариант | Тип двигателя | Номинальная мощ ность на валу кВт | Номинальное напряжение В | Номинальный ток якоря А | Номинальная частота вращения об/мин | Сопротивление обмотки якоря Ом | Индуктивность обмотки якоря 10-3 Гн | Момент инерции якоря 10-3 кг/м2 | Отношение момента сопротивления к Мн в % | Схема управления |
| Р2Н | UН | IЯН | пН | R | L | J | а | |||
| МИ-22 | 0,37 | 8,2 | 0,195 | Т | ||||||
| С | ||||||||||
| МИ-22 | 0,25 | 5,5 | 0,36 | В | ||||||
| Т | ||||||||||
| МИ-31 | 0,45 | 10,3 | 0,118 | С | ||||||
| В | ||||||||||
| МИ-31 | 0,37 | 4,4 | 0,757 | Т | ||||||
| В | ||||||||||
| МИ-32 | 0,76 | 8,2 | 0,237 | 1,7 | 13,25 | С | ||||
| Т | ||||||||||
| МИ-32 | 0,45 | 5,0 | 0,605 | 4,5 | 13,25 | Т | ||||
| В | ||||||||||
| МИ-32 | 0,37 | 4,2 | 1,46 | 8,5 | 13,25 | С | ||||
| Т | ||||||||||
| МИ-41 | 1,6 | 19,2 | 0,147 | С | ||||||
| В | ||||||||||
| МИ-41 | 1,1 | 13,0 | 0,42 | 2,5 | В | |||||
| Т | ||||||||||
| МИ-42 | 3,2 | 36,3 | 0,06 | 0,4 | С | |||||
| В | ||||||||||
| МИ-42 | 1,6 | 18,2 | 0,192 | 1,5 | Т | |||||
| С | ||||||||||
| МИ-42 | 1,1 | 12,6 | 0,435 | В | ||||||
| Т |
3. РАСЧЕТ ЧИСЛА СТУПЕНЕЙ ПУСКА
На рис. 1 представлена часть принципиальной электрической схемы пуска и динамического торможения двигателя постоянного тока, а на рис. 2 - его скоростные характеристики.
В рассматриваемом примере число пусковых резисторов т равно двум. В общем случае число пусковых резисторов может быть как больше, так и меньше двух, например, 1, 2, 3, 4, 5 и т.д. Эта величина определяется максимальным и минимальным токами (I1, I 2) при замыкании накоротко пусковых резисторов. Согласно [3]:
I1=  IЯН (1)
IЯН (1)
I2=  Iс (2)
Iс (2)
Расчет числа пусковых резисторов (числа ступеней) может быть выполнен графоаналитически или аналитически. С графоаналитическим
расчетом можно ознакомиться, например, в[1], § 4.2.
При аналитическом расчете число ступеней m определяется соотношением [3]:
m = (lnIn/I1)/(lnI1/I2),
где In - величина максимального пускового тока при отсутствии добавочных резисторов
 (3)
(3)
Величина m должна быть целым числом. Для достижения этого рекомендуется сначала принять средние значения I1 и I 2 и определить при этих значениях m.Далее найденное значение m округляется до ближайшего целого числа, после чего уточняется ток I1
I1 = еа, (4)
а =  (5)
(5)
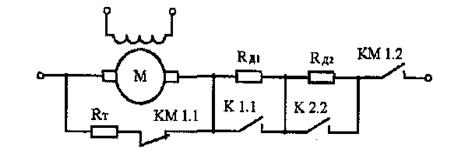
Рис. 1. Часть принципиальной электрической схемы
пуска и динамического торможения двигателя постоянного тока

Рис. 2. Скоростные характеристики двигателя постоянного тока
Возможен и другой алгоритм выбора числа ступеней, при котором задаются рядом значений m (m= 1,2,3...) и по формулам (4), (5) определяют ток I1. Останавливаются на том минимальном значенииm, при котором выполняется равенство (1). Именно этот алгоритм выбора числа ступеней программу ЭВМ и должен быть использован при выполнении курсовой работы "вручную".
ВТОРОЙ ПОДХОД К РАСЧЕТУ
Рассмотренный ранее подход к расчету дополнительных резисторов имеет право на существование. Однако, опыт показал, что он не является удачным, так как в результате максимальные пусковые токи на каждом из этапов пуска различаются в несколько раз. А ведь с точки зрения равномерности нагрузки сети и благоприятного режима работы ДПТ было бы рационально иметь на каждом из этапов пуска равные максимальные пусковые токи. Попробуем реализовать такой подход.
1. Пуск с одним добавочным резистором.
Так как в начале первого этапа пуска якорь неподвижен, максимальный пусковой ток на этом этапе будет равен:
 , (1в)
, (1в)
где RД – сопротивление дополнительного резистора.
Если дополнительный резистор будет отключаться при токе якоря равном I2, то в этот момент угловая скорость будет равна:?
 . (2в)
. (2в)
Тогда максимальный ток на втором этапе пуска будет равен:
 . (3в)
. (3в)
Приравнивая правые части (1в) и (3в), получим:
 . (4в)
. (4в)
Или
 . (5в)
. (5в)
Решая квадратное уравнение (5в), получим искомое значение RД. Решение можно искать вручную, а можно с использованием математического инструментария MatLab(оператор roots(P), где Р – матрица строка коэффициентов уравнения). Естественно, решения не отвечающие физическому смыслу нужно отбросить.
Найденное решение подставляем в (1в) и проверяем выполнение условия:
 . (6в)
. (6в)
Если условие (6в) выполняется, то задача решена. Если не выполняется, то необходимо перейти к рассмотрению пуска с двумя дополнительными резисторами.
2. Пуск с двумя дополнительными резисторами.
Пусть система имеет два дополнительных резистора RД1 и RД2. Причем после первого этапа пучка отключается резистор RД1, а после второго – резистор RД2. Тогда максимальный ток на первом этапе пуска будет равен:
 . (7в)
. (7в)
Далее, рассуждая аналогично случаю пуска с одним резистором, получим уравнение третьей степени относительно RД2.
 . (8в)
. (8в)
Решая его, найдем четыре корня, из которых необходимо отобрать один, исходя из критерия физической реализуемости. Затем по формуле:
 . (9в)
. (9в)
Рассчитывается сопротивление резистора RД1. Подставляя найденные значения сопротивлений в (7в), найдем максимальный пусковой ток, а затем проверим выполнение условия (6в). Если оно выполняется, то задача успешно решена.
Пример. Пусть R=0,2 Ом; U=60В; I2=5,3 А; I1=25 А.
Проверим возможность пуска двигателя с одним дополнительным резистором. Подставляя исходные данные в уравнение (5в), получим:
 . (10в)
. (10в)
Решим это уравнение с использованием MatLab:
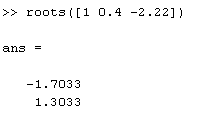
Так как сопротивление не может быть отрицательным, выберем  .
.
Подставляя в (1в), найдем максимальный пусковой ток  А. Следовательно, условие (6в) не выполняется.
А. Следовательно, условие (6в) не выполняется.
Проверим возможность запуска двигателя с двумя дополнительными резисторами. Подставляя исходные данные в уравнение (8в), получим:
 . (8в)
. (8в)
Решая его с использованием MatLab, получим:

Так как сопротивление не может быть комплексно-сопряженным, выберем  .
.
Подставляя  в формулу (9в), найдем
в формулу (9в), найдем  . Подставляя результаты в (7в), найдем максимальный пусковой ток:
. Подставляя результаты в (7в), найдем максимальный пусковой ток:
 А. (7в)
А. (7в)
Условие (6в) выполняется, следовательно, задача решена.
3. РАСЧЕТ СОПРОТИВЛЕНИЙ РЕЗИСТОРОВ
Для естественной характеристики (нулевая ступень) полное сопротивление якорной цепи Rяо равно сопротивлению якорной обмотки R(рис.2). На первой ступени:
RЯ1 =R + RД1, (6)
где добавочное сопротивление RД1 определяется так:
RД1 = 
На второй ступени
RЯ2 = R+ RД1 + RД2 (7)
гдеRД2=  (R + RД1)
(R + RД1)
В общем случае для i-ой ступени:
Rяi=R + RДl+RД2+... + RДi, (8)
RД1 =  (9)
(9)
При определении сопротивления резистора для динамического торможения Rr исходят из того, что максимальный ток при динамическомторможении не должен превосходить по величине ток I1.
Поэтому
 (10)
(10)
5. УПРОЩЕННЫЙ РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПРИ ПУСКЕ И ДИНАМИЧЕСКОМ ТОРМОЖЕНИИ
Дифференциальное уравнение, определяющее изменение тока itво время переходных процессов при пуске на i-й ступени имеет вид:
 (11)
(11)
где Тяi; - электромагнитная постоянная времени на i-й ступени; TMi-электромеханическая постоянная времени на i-й ступени; Iyi - установившееся значение тока на i-й ступени;
Tяi=L/Rяi(12)
Tmi=RяiJ/k2эм (13)
При расчете "вручную" пренебрегают индуктивностью L якорной обмотки, т.е. принимают Тяi ≈ 0. Тогда можно получить:
 (14)
(14)
Решение уравнения (14) имеет вид:
iя= Iуi  + Iначi
+ Iначi 
где Iначi - начальное значение тока на i-й ступени. В данном случае для всех ступеней
Iуi = Ic Iначi =I1
Этому для каждой ступени ток iя определяется уравнением (16)
iя = Iс  + I1
+ I1  (16)
(16)
На основании (16) время tui, в течение которого ток в якоре уменьшается на i-й ступени, определяется так:
tui= Тmiln 
Для рассматриваемого примера формула (17) позволяет определить время пуска на второй и первой ступенях. При пуске двигателя по естественной характеристике
Tио  3Тмо, гдеТмо = RJ/k2эм
3Тмо, гдеТмо = RJ/k2эм
Здесь ток якоря уменьшается от I1, до Ic.
Дифференциальное уравнение, определяющее изменение частоты вращения двигателя  на i-й ступени, имеет вид:
на i-й ступени, имеет вид:
ТяiTмi  Tмi
Tмi  = уi (18)
= уi (18)
При Тяi 0, получаем
Tмi 
 =
=  уi (19)
уi (19)
где уi– установившаяся частота вращения двигателя на i-й ступени. Решение этого уравнения имеет вид:
= уi + начi  (20)
(20)
где начi- начальная частота вращения на i-й ступени.
Каждой ступени при определении соответствует не только свое значение Tмi, но и свои значения начальной и установившейся величин частоты вращения ( начi , уi). Так, для рассматриваемого примера (рис.2) при пуске на второй ступени:
нач2= 0; у2= с2, где с2=  ,
,
а величина RЯ2 определяется уравнением (7).
При пуске на первой ступени:
нач 1 = 2 = 
у1 = с1 = 
где величина RЯ1 определяется уравнением (6).
При пуске по естественной характеристике (нулевая ступень):
нач 0 = 1 = 
В общем случае при разгоне по i-й ступени:
начi= 
уi= 
Рассмотрим теперь переходные процессы в режиме динамического торможения. Для реализации этого режима якорь двигателя отключается от сети и замыкается на резистор RT, а обмотка возбуждения остается под напряжением, Если считать, что индуктивность якорной обмотки равна 0, то при этом переключении ток в якорной цепи скачком изменяется от IС до IТ(рис. 2), где IТ - величина отрицательная. Рабочая точка перемещается с естественной характеристики 1 на характеристику динамического торможения 2. Далее величины iяи уменьшаются до нуля. Если бы после достижения равенства = 0 момент сопротивления не изменил своего знака и оставался постоянным по модулю, то двигатель изменил бы направление вращения и достиг частоты т при токе iя = ic,
где т=  (23)
(23)
Однако, после достижения частоты вращения = 0 момент сопротивления меняет свой знак и двигатель останавливается. Ранее указывалось, что при выполнении этой курсовой работы момент нагрузки представляет собой момент сухого трения. Для определения тока якоря во время динамического торможения можно воспользоваться уравнением (15), приняв:
Iуi= Iс;Iнач = IТ
При этом получим:
iя=Ic(1 – е-t/Tmg) + IТе-t/Tmg (24)
где Тmд=  ;Rят = RТ + R.
;Rят = RТ + R.
Для определения изменения в процессе динамического торможения можно использовать уравнение (20), приняв
уi= T; начi= c
При этом получаем
= T(1 – е-t/Tmg) + c е-t/Tmg (25)
Уравнения (24), (25) справедливы до достижения = 0.
Учитывая, что в конце динамического торможения = 0, на основании (25) можно определить время динамического торможения
tT = Тmgln  ,
,
где T - величина отрицательная.
РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ НА ЭВМ
Расчет переходных процессов на ЭВМ отличается от расчета "вручную" тем, что здесь решаются не упрощенные, а полные дифференциальные уравнения с учетом индуктивности обмотки якоря, определяющие изменения i2и , т.е уравнения (11), (18).
Известно, что при
Tмi>4Тяi (26)
Переходной процесс получается апериодическим и решения дифференциальных (11), (18) имеют вид:
= у + А1е  + А2е
+ А2е 
iЯ=IС+В1е +В2е ,
где корни характеристического уравнения, А1,А2,В1,В2 — постоянные шия, которые определяются из начальных условий.
При Tмi< 4Тяi (27)
переходный процесс получается колебательным, а функции и iЯ определяются так:
= у +еаt(Cl cos  t + C2 sin t),
t + C2 sin t),
iЯ= IС + еаt(Dl cos t + D2 sin t),
Здесь корни характеристического уравнения получаются комплексно-сопряженными, т.е. равнымиа± j :
 = -
= -  =
= 
Постоянные интегрирования С1,С2,D1,D2 находятся из начальных условий, для чего для каждой ступени при t=0определяются соответственноiЯиdiя/dt, и d /dt
При учете индуктивности цепи якоря Lсуществует небольшой дополнительный интервал переходного процесса, который длится от момента замыкания контакта КМ1 (рис.1) до момента достижения тока в якоре значения IС. Время этого интервала определяется также, как и время троганияэлектромагнитных реле
tтр= Тяiln 
где величина Тяiсоответствует той ступени, с которой начинается пуск. Для рассматриваемого примера Тяi = ТЯ2.
Работа на ЭВМ типа IBM ведется в диалоговом режиме. Обозначения всех переменных соответствуют указанным в настоящих методических указаниях. Для утвердительного ответа на вопросы типа "Изменить исходные данные?" необходимо нажать клавишу <У>,для отрицательного ответа - клавишу <N>. Результаты расчетов (таблицы, графики) возможно выводить на экран, в виде файла или на принтер.
|
из
5.00
|
Обсуждение в статье: ВТОРОЙ ПОДХОД К РАСЧЕТУ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы