 |
Главная |


Математические модели автономных электрогидравлических следящих приводов
|
из
5.00
|
Схема ЭГСП первого типа дана на рис.1. Электродвигатель 1 приводит во вращение трехшестеренный насос 2, который создает потоки рабочей жидкости, направляемой к золотниковым плунжерам 3. В отсутствие подводимого от электронного усилителя сигнала  жидкость через окна, открытые золотниковыми плунжерами, поступает на слив. Вследствие равенства площадей окон разность давлений в полостях гидроцилиндра 4 равна нулю и поршень 5 вместе со штоком 6 неподвижны. При наличии сигнала в виде напряжения
жидкость через окна, открытые золотниковыми плунжерами, поступает на слив. Вследствие равенства площадей окон разность давлений в полостях гидроцилиндра 4 равна нулю и поршень 5 вместе со штоком 6 неподвижны. При наличии сигнала в виде напряжения  на концах обмотки 7 электромеханического преобразователя (ЭМП) происходит поворот качалки 8 по или против часовой стрелки в зависимости от полярности сигнала. Поворот качалки вызывает перемещение золотниковых плунжеров, увеличивающих открытие одного окна и уменьшающих открытие другого. Соответственно давление в одной полости гидроцилиндра уменьшается, а в другой – увеличивается. Под действием силы, созданной разностью давлений в гидроцилиндре, поршень 5 перемещается до тех пор, пока сигнал
на концах обмотки 7 электромеханического преобразователя (ЭМП) происходит поворот качалки 8 по или против часовой стрелки в зависимости от полярности сигнала. Поворот качалки вызывает перемещение золотниковых плунжеров, увеличивающих открытие одного окна и уменьшающих открытие другого. Соответственно давление в одной полости гидроцилиндра уменьшается, а в другой – увеличивается. Под действием силы, созданной разностью давлений в гидроцилиндре, поршень 5 перемещается до тех пор, пока сигнал  обратной связи от датчика 10 не уменьшит до требуемого значения. Установленные на напорных магистралях насоса, предохранительные клапаны 9 ограничивают наибольшее повышение давления в гидроцилиндре.
обратной связи от датчика 10 не уменьшит до требуемого значения. Установленные на напорных магистралях насоса, предохранительные клапаны 9 ограничивают наибольшее повышение давления в гидроцилиндре.
В ЭГСП второго типа (рис 2) применен плоский золотник 1 и двухшестеренный насос 2 [4]. Переливной клапан 3 поддерживает постоянное давление в напорной магистрали насоса. При поступлении сигнала в обмотки 4 ЭМП, золотник, закрепленный на упругой рамке, отклоняется от среднего положения, вызывая изменение давления в полостях гидроцилиндра. В остальном этот тип ЭГСП действует аналогично первому типу.
Математические модели обоих типов ЭГСП составим, используя общую методику математического описания таких динамических систем.
Для ЭГСП первого типа примем следующие допущения:
- вследствие малости технологических зазоров у золотниковых плунжеров утечки жидкости по ним можно не учитывать;
- зависимости подачи насосов от давления в напорных каналах линейные;
- гидродинамические силы, действующие на золотниковые плунжеры, и силы сухого трения в подвижных элементах пренебрежимо малы.
При указанных допущениях были получены перечисленные ниже уравнения.
Уравнение электрического сигнала ошибки
 (1)
(1)
где  – входной сигнал при управлении ЭГСП.
– входной сигнал при управлении ЭГСП.
Уравнение, описывающее преобразование сигнала в ЭУ
 (2)
(2)
где - напряжение на выходе ЭУ,  – коэффициент усиления ЭУ.
– коэффициент усиления ЭУ.
Уравнение напряжений в обмотках ЭМП
 , (3)
, (3)
где  – ток управления,
– ток управления,  - сопротивление обмоток ЭМП,
- сопротивление обмоток ЭМП,  - сопротивление выходного каскада электронного усилителя,
- сопротивление выходного каскада электронного усилителя,  – индуктивность ЭМП,
– индуктивность ЭМП,
Уравнение движения золотниковых плунжеров
 , (4)
, (4)
где  – перемещение золотниковых плунжеров,
– перемещение золотниковых плунжеров,  – постоянная времени узла управления (УУ),
– постоянная времени узла управления (УУ),  - коэффициент относительного демпфирования УУ,
- коэффициент относительного демпфирования УУ,  - коэффициент передачи УУ.
- коэффициент передачи УУ.
Коэффициент, связи угла поворота якоря ЭМП с перемещением золотниковых плунжеров
 , (5)
, (5)
где  – плечо качалки УУ
– плечо качалки УУ
Уравнение линеаризованной расходно-перепадной характеристики (рис 3)
 , (6)
, (6)
где  – разность давлений в полостях нагруженного гидроцилиндра, коэффициенты
– разность давлений в полостях нагруженного гидроцилиндра, коэффициенты  и
и  находят аппроксимацией расходно-перепадной характеристики (при различных положениях золотниковых плунжеров).
находят аппроксимацией расходно-перепадной характеристики (при различных положениях золотниковых плунжеров).
Уравнение баланса расходов при движении поршня гидроцилиндра
 , (7)
, (7)
где  – перемещение штока гидроцилиндра,
– перемещение штока гидроцилиндра,  – модуль объемной упругости жидкости в гидроцилиндре, закрепленном на упругой опоре,
– модуль объемной упругости жидкости в гидроцилиндре, закрепленном на упругой опоре,  – расход рабочей жидкости,
– расход рабочей жидкости,  – рабочая площадь поршня,
– рабочая площадь поршня,  – объем одной полости гидроцилиндра при среднем положении поршня.
– объем одной полости гидроцилиндра при среднем положении поршня.
Уравнение движения управляемого приводом объекта
 , (8)
, (8)
где  – масса подвижных частей управляемого объекта, приведенная к штоку привода,
– масса подвижных частей управляемого объекта, приведенная к штоку привода,  – координата положения центра приведенной массы, измеряемая от среднего положения поршня,
– координата положения центра приведенной массы, измеряемая от среднего положения поршня,  – коэффициент трения в подвижных частях обекта,
– коэффициент трения в подвижных частях обекта,  – жесткость связи штока гидроцилиндра с управляемым объектом,
– жесткость связи штока гидроцилиндра с управляемым объектом,  – “жесткость” позиционной нагрузки.
– “жесткость” позиционной нагрузки.
Уравнение сил, действующих на поршень гидроцилиндра
 , . (9)
, . (9)
Уравнение сил, действующих на гидроцилиндр
 , (10)
, (10)
где  – жесткость опор гидроцилиндра,
– жесткость опор гидроцилиндра,  - перемещение гидроцилиндра.
- перемещение гидроцилиндра.
Уравнение сигнала обратной связи, снимаемого при перемещении штока гидроцилиндра
 , (11)
, (11)
где  – коэффициент позиционной обратной связи.
– коэффициент позиционной обратной связи.
Уравнения (1) – (11) описывают математическую модель ЭГСП, их можно записать в нормальной форме Коши:
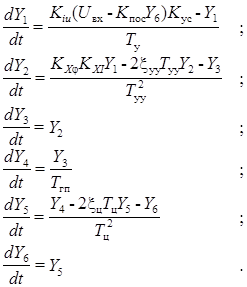 (12)
(12)
Переменные и коэффициенты, входящие в систему уравнений (12), определяется по следующим соотношениям:
 ;
;  ;
;  ;
;  ;
;  ;
;
 Ом,
Ом,  ,
,  Гн,
Гн,
 c,
c,  1/Ом,
1/Ом,
 мм/А,
мм/А,  c,
c,  ,
,
 ,
,  ,
,  ,
,  ,
,  В/м.
В/м.
Начальные условия (t0=0)

Для решения задачи был использован метод Рунге-Кутты с модификацией Мерсона, который позволяет эффективно решать подобные системы. Входное воздействие выбрано ступенчатым с  В.
В.
Качество ЭГСП оценивалось по двум критериям, которыми служили:
1. Электрическая мощность, потребляемая электродвигателем в отсутствие управляющего сигнала на обмотках ЭМП,  [Вт].
[Вт].
2. Характеризующий динамическую ошибку и продолжительность переходного процесса функционал

 ,
,
где  – принятое с учетом заданной точности управления конечное перемещение штока гидроцилиндра,
– принятое с учетом заданной точности управления конечное перемещение штока гидроцилиндра,  – перемещение штока гидроцилиндра в текущий момент времени.
– перемещение штока гидроцилиндра в текущий момент времени.
Варьируемые параметры и границы их изменения приняты следующими:
- давление настройки предохранительного клапана -  ,
,
пределы изменения давления 4,0 ≤  ≤ 8,0 МПа;
≤ 8,0 МПа;
- коэффициент подачи насоса -  ,
,
пределы изменения коэффициента 1,1 ≤  ≤ 1,5;
≤ 1,5;
- коэффициент давления (определяет какое давление будет в отсутствие управляющего сигнала на обмотках ЭМП) -  ,
,
пределы изменения коэффициента 0,1 ≤  ≤ 0,5.
≤ 0,5.
Численные значения конструктивных параметров, используемые в численных экспериментах, определялись с помощью приведенных ниже формул.
Сила торможения штока гидроцилиндра принята согласно техническому заданию на проектирование ЭГСП равной
 Н (13)
Н (13)
Рабочая площадь поршня гидроцилиндра
 (14)
(14)
Первое значение диаметра поршня гидроцилиндра при известном диаметре штока 
 (15)
(15)
По полученному значению диаметра поршня назначается  , наиболее близкое к значениям ряда нормальных размеров.
, наиболее близкое к значениям ряда нормальных размеров.
Площадь поршня гидроцилиндра:
 (16)
(16)
Наибольший расход жидкости, необходимый для работы ЭГСП, определяется геометрическими размерами гидроцилиндра и заданной скоростью поршня при минимальной нагрузке, поэтому:  , где
, где  – максимальная производительность насоса (в отсутствие нагрузки, действующей на шток гидроцилиндра),
– максимальная производительность насоса (в отсутствие нагрузки, действующей на шток гидроцилиндра),  – максимальная скорость поршня гидроцилиндра (в соответствии с техническим заданием).
– максимальная скорость поршня гидроцилиндра (в соответствии с техническим заданием).
При расчетах характеристик привода учитывалась механическая характеристика выбранного электродвигателя насоса и зависимость потребляемого тока от нагрузки на валу. Характеристика представлена уравнением:
 об/мин, (17)
об/мин, (17)
где  - число оборотов вала электродвигателя,
- число оборотов вала электродвигателя,  - момент на валу электродвигателя.
- момент на валу электродвигателя.
Электрический ток, потребляемый электродвигателем насоса:
 А (18)
А (18)
Теоретическая производительность насоса:

 (19)
(19)
Число зубьев шестерен насоса  , модуль зубчатого колеса
, модуль зубчатого колеса  м.
м.
Ширина зубчатых колес шестеренного насоса определена по формуле:
 (20)
(20)
Ширина  принимается ближайшей из нормального ряда.
принимается ближайшей из нормального ряда.
Уточненное значение удельной производительности насоса:
 (21)
(21)
Суммарная площадь дроссельных окон, открываемых золотниковым плунжером, определяется из соотношения:
 (22)
(22)
где  - проводимость окон, равная:
- проводимость окон, равная:  (23)
(23)
Площадь каждого из четырех дроссельных окон:
 (24)
(24)
Площадь дроссельного окна связана с перемещением золотника соотношением:
 (25)
(25)
Коэффициенты  и
и  определяются по расходно-перепадной характеристике (Рис. 3).
определяются по расходно-перепадной характеристике (Рис. 3).
Гидравлическая постоянная времени привода:
 , (26)
, (26)
где  – приведенная жесткость нагруженного гидроцилиндра
– приведенная жесткость нагруженного гидроцилиндра
 , (27)
, (27)
где  – приведенный модуль упругости гидроцилиндра
– приведенный модуль упругости гидроцилиндра
Механическая постоянная времени гидроцилиндра:
 .
.
Постоянная времени демпфирования гидроцилиндра:
 .
.
Коэффициент относительного демпфирования гидроцилиндра:
 – объем полости гидроцилиндра при среднем положении поршня, здесь
– объем полости гидроцилиндра при среднем положении поршня, здесь  м - ход поршня,
м - ход поршня,
 м3 – объем подводящего трубопровода гидролинии и мертвого объема гидроцилиндра,
м3 – объем подводящего трубопровода гидролинии и мертвого объема гидроцилиндра,
 [МПа] – модуль объемной упругости рабочей жидкости.
[МПа] – модуль объемной упругости рабочей жидкости.
 –масса подвижных частей управляемого объекта, приведенная к штоку привода:
–масса подвижных частей управляемого объекта, приведенная к штоку привода:
 кг, где
кг, где
 Н м с2 – момент инерции управляемого объекта относительно оси вращения,
Н м с2 – момент инерции управляемого объекта относительно оси вращения,
 м – плечо управляемого объекта,
м – плечо управляемого объекта,
 Н с/м
Н с/м
 – жесткость крепления гидроцилиндра.
– жесткость крепления гидроцилиндра.
 Н/м – жесткость опоры гидроцилиндра,
Н/м – жесткость опоры гидроцилиндра,
 Н/м – жесткость связи штока с управляемыми органами объекта,
Н/м – жесткость связи штока с управляемыми органами объекта,
 Н/м – “жесткость” позиционной нагрузки.
Н/м – “жесткость” позиционной нагрузки.
 (28)
(28)
 Н/м
Н/м
Значения исходных величин при численных испытаниях ЭГСП первого типа представлены в табл.1.
Значения параметров ЭГСП первого типа
Таблица 1
| Исходная величина | обозн. | значение | размерн. |
| Диаметр штока | 
| 0,012 | м |
| Диаметр поршня гидроцилиндра | 
| 0,037 | м |
| Площадь поршня гидроцилиндра | 
| 9,6410-4 | м2 |
| Модуль зубчатых колес насоса: | 
| 0,001 | м |
| Число зубьев зубчатых колес насоса | 
| 15 | |
| Ширина зубчатых колес насоса | 
| 0,0055 | м |
| Удельная производительность насоса | 
| 5,1810-7 | м3/об |
| Начальное открытие золотника | 
| 0,00036 | м |
| Радиус отверстий в золотнике | 
| 0,00175 | м |
| Число отверстий во втулке золотника | 
| 4 | |
| Давление настройки предохранительных клапанов: | 
| 4106 | Па |
| Сопротивление обмоток ЭМП | 
| 200 | Ом |
| Индуктивность обмоток ЭМП | 
| 2,5 | Гн |
| Постоянная времени и коэффициент передачи электрической цепи ЭМП | 
| 0,0125 | с |

| 0,005 | А/В | |
| Постоянные времени и коэффициенты механической части ЭМП | 
| 1000 | мм/А |

| 0,004 | c | |

| 0,133 | ||

| 1,510-5 | м/рад | |
| Коэффициенты линеаризованной расходно-перепадной характеристики (рис. 3) | 
| 0,292 | м2/с |

| 6,4410-10 | м5/сН | |
| Объем полости гидроцилиндра при среднем положении поршня | 
| 1,6410-5 | м3 |
| Модуль объемной упругости рабочей жидкости | 
| 1250 | МПа |
| Объем подводящего трубопровода и мертвый объем гидроцилиндра | 
| 510-6 | м3 |
| Гидравлическая постоянная времени привода | 
| 0,00331 | с |
| Механическая постоянная времени и коэффициент демпфирования гидроцилиндра | 
| 0,0114 | с |

| 0,36 | ||

| 0,0158 | с |
|
из
5.00
|
Обсуждение в статье: Математические модели автономных электрогидравлических следящих приводов |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы