 |
Главная |


Описание выбора элементной базы и работы принципиальной схемы
|
из
5.00
|
Нарис. 6 изображена принципиальная схема устройства сопряжения компьютера и тренажера.
Основой схемы является микроконтроллер AT90S2313-10PI. С помощью геркона S1 микроконтроллер отслеживает каждый оборот педалей тренажера. Ротор резистора R1 сопрягается с регулятором нагрузки тренажера. На элементах R1,R3,R5,C5 выполнен своеобразный аналого-цифровой преобразователь. Микроконтроллер измеряет время разряда конденсатора С5 через резисторы R1,R3,R5. В результате положение ротора резистора R1 преобразуется в цифровой код. Светодиод VD1 индицирует каждый оборот кратковременной вспышкой. Передача данных в СОМ порт компьютера производится через оптрон D2. Протокол передачи данных очень простой - с каждым оборотом педалей в компьютер передается на скорости 9600 один байт, который представляет собой код положения ротора резистора R1. Большую часть времени микроконтроллер находится в спящем режиме, поэтому в схеме отсутствует выключатель питания. В режиме ожидания схема потребляет менее 1 мкА. При вращении педалей с частотой 1 оборот в секунду потребление составляет около 300 мкА. Питание осуществляется от двух батарей АА.



Рис.6. Схема сопряжения велотренажера с компьютером
В устройстве применены следующие элементы: микроконтроллер AT90S2313-10PI, оптрон 4N33, кварцевый резонатор на 4 МГц, постоянные резисторы мощностью 0,125 Вт, резистор R1 типа TELPOD WT-2712 или СПЗ-36. Конденсатор С5 желательно использовать с малой температурной зависимостью. Наилучший вариант - К10-43В, но и К73-9. К73-17 тоже можно использовать. Остальные конденсаторы керамические, любого типа. Разъем типа DB25F. Геркон любого подходящего по габаритам типа. Светодиод желательно использовать «сверхяркого» типа. К соединяющему кабелю особых требований не выдвигается - он может быть неэкранированным.
Правильно собранная конструкция в настройке не нуждается. Вращая педали тренажера нужно убедиться, что светодиод VD1 мигает при каждом обороте.
В тренажере ВЕ6200 имеется датчик оборотов, который состоит из постоянного магнита, закрепленного на «рабочем колесе», и геркона, закрепленного на неподвижном кронштейне. Закрепляем «наш» геркон возле «родного» геркона таким образом, чтобы он тоже попадал в поле вращающегося магнита. Регулятор нагрузки в ВЕ6200 управляет натяжением ременного тормоза. Между минимальной и максимальной нагрузкой ручка регулятора делает около шести полных оборотов.
Принципиальная схема синтезатора выполнена в САПР Accel Eda (Рис. 7).
Пришлось написать небольшую вспомогательную программу Velo к программе NikLock. Алгоритм их взаимодействия следующий - NikLock хранит свои настройки в реестре, Velo пишет результат своей работы в то же место реестра. Недостаток такого подхода всего один - заработанное «машинное время» добавляется не «на лету», а после перезагрузки компьютера. Скриншот программы Velo показан на рис.8.
Вначале инсталлируем программу NikLock V1.53 и настраиваем ее на ежедневное использование с начальным лимитом времени 15-30 минут. Далее настраиваем программу Velo. Устанавливаем нужный СОМ порт компьютера (к которому подключен разъем приставки). Затем необходимо произвести калибровку тренажера и нормирование труда. Для этих целей в дистрибутив программы

Рис. 7. Принципиальная схема велотренажера в Accel EDA
Принципиальная схема велотренажера приведена в Приложении В.
Velo входит файл Calibrare.xls. Вначале выкручиваем на тренажере регулятор нагрузки на минимум и смотрим после вращения педалей, какое значение индицируется в окне Byte. Затем повторяем эту процедуру для максимального уровня нагрузки. Вписываем эти значения в соответствующие поля файла Calibrate.xls. Далее нужно вписать в соответствующие поля два параметра по нормированию труда. Первый параметр - это стоимость (в секундах) одного оборота тренажера при минимальном положении регулятора нагрузки. Второй параметр - это коэффициент «утяжеления» занятий при максимальном положении регулятора. Эти два параметра определяются эмпирическим путем на основе личного педагогического опыта. После вписывания всех параметров MS Excel рассчитывает путем линейной интерполяции калибровочную таблицу, в которой отражена «цена» каждого принятого байта. Сохраняем эту таблицу в виде «Форматированный текст (разделители - пробелы)» в ту же папку, где лежит программа Velo. В результате получаем текстовый файл Calibrate.ргп, который программа Velo будет использовать. Этот файл, кстати, можно потом редактировать вручную в любом текстовом редакторе Теперь о повседневном использовании. Ребенок включает компьютер. Программа NikLock отмеряет ему (согласно настройке) небольшой начальный интервал времени. Его можно сразу истратить на компьютерные игры, либо, запустив программу Velo, заработать с помощью велотренажера себе еще некоторое количество «машинного времени». Когда начальный интервал времени истечет, компьютер нужно перезагрузить (или включить снова, если NikLock его уже выключил) и теперь программа NikLock отмерит заработанный интервал времени. Его можно использовать частично на игру, частично опять на заработок нового времени с помощью тренажера и программы Velo и т.д.
Программу Velo можно использовать и в фоновом режиме, т.е. запускаем сначала Velo, затем игру. В результате один ребенок может играть, а другой в это время зарабатывать себе время.

Рис.8. Скриншот программы Velo
Заключение
В данном курсовом проекте разработано устройство - велотренажер с игровым уклоном. Разработана схема электрическая принципиальная этого устройства и программа для микроконтроллера. В результате ассеблирования получена прошивка программы для памяти микроконтроллера. Применение микроконтроллера позволило упростить принципиальную схему и расширить функциональные возможности микроконтроллера, так как для изменения функций устройства достаточно внести изменения в программу микроконтроллера.
Список литературы
1. Белов А.В. Микроконтроллеры АVR в радиолюбительской практике – СП-б, Наука и техника, 2007 – 352с.
2. Проектирование цифровых устройств на однокристальных микроконтроллерах / В.В. Сташин [ и др.]. – М.: Энергоатомиздат, 1990. – 224 с.
3. Евстифеев А.В. Микроконтроллеры Microchip: практическое руководство/А.В.Евстифеев. – М.: Горячая линия – Телеком, 2002. – 296 с.
4. Кравченко А.В. 10 практических устройств на AVR-микро-
контроллерах. Книга 1 – М., Додэка –ХХ1, МК-Пресс, 2008 – 224с.
5.Трамперт В. Измерение, управление и регулирование с помощью АVR-микроконтроллеров: Пер. с нем – К., МК-Пресс, 2006 – 208с.
6. Мортон Дж. Микроконтроллеры АVR. Вводный курс /Пер. с англ. – М., Додэка –ХХ1, 2006 – 272с.
7.Техническая документация на микроконтроллеры AT90S2313 фирмы «Atmel» ООО «Микро -Чип», Москва, 2006.-484 с.
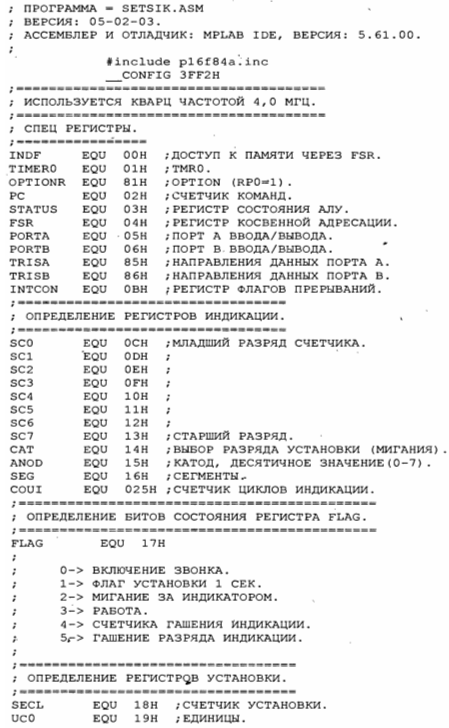
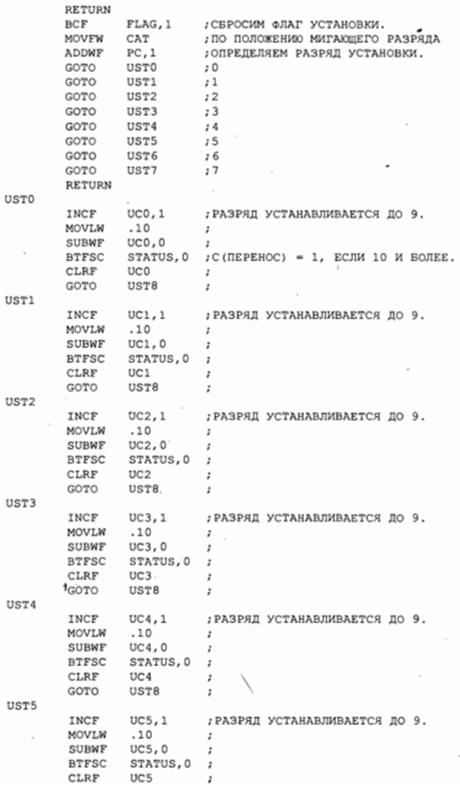
ПРИЛОЖЕНИЕ А
Листинг программы









ПРИЛОЖЕНИЕ Б
Объектный файл

|
из
5.00
|
Обсуждение в статье: Описание выбора элементной базы и работы принципиальной схемы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы