 |
Главная |


Блок управления механическим секторным датчиком
|
из
5.00
|
Узлы формирования и обработки первичных сигналов
Введение
Современные УЗ сканеры являются сложными многофункциональными устройствами. Они позволяют выполнять исследования в реальном масштабе времени в режиме М и режиме В, а также в смешанном режиме – М/В, запоминать информацию (режим стоп-кадра, или Freeze), производить различные преобразования изображения – поворот, инверсию (позитив-негатив), изменение масштаба (Zoom), некоторые вычисления геометрических характеристик объектов – периметр, площадь, коэффициент формы (отношение площади к периметру) и др. Наиболее сложные сканеры имеют в своем арсенале доплеровский режим, позволяющий исследовать и отображать параметры гемодинамики.
Сложность УЗ сканеров в основном зависит от набора датчиков. Наиболее простые сканеры имеют набор из трех – четырех механических секторных датчиков, которые до сих пор остаются популярными у пользователей. Более сложные (и дорогие) сканеры комплектуются несколькими секторными и несколькими линейными или конвексными датчиками. Датчики отличаются формой, размерами и частотами. От рабочей частоты датчика зависит его глубина локации, так как от частоты зависит затухание звуковых колебаний. Эта зависимость приведена ниже.
Частота, МГц Глубина локации, мм
3,5 200
5,0 100
7,5 50
Датчики с частотой 3,5 МГц используются для обследования абдоминальной области и сердца, 5 МГц – сердца; 7,5 МГц – щитовидной железы. Датчики с частотой 10 МГц используют для офтальмологических исследований. Следует отметить, что В- и М-эхограммы в УЗ сканерах получают с помощью одних и тех же двухмерных датчиков. Для этого, как было сказано выше, в режиме М фиксируют положение пьезопреобразователя секторного датчика или апертуры линейного (конвексного). В смешанном режиме для формирования М-эхограммы регистрируют эхо-сигналы, приходящие с выбранного направления.
На рис.1 приведена структурная схема универсального УЗ сканера. В ходе исследования могут использоваться датчики разных видов (например, секторный и линейный). К аппарату подключаются сразу несколько датчиков и выбираются по мере необходимости сенсорами на пульте. Блок управления секторным датчиком осуществляет привод электродвигателя, возбуждение пьезопреобразователя, прием и предварительное усиление эхо-сигналов, прием сигналов от датчика углового положения и их передачу в блок цифрового конвертора изображения. Блок управления линейным датчиком организует сканирование, фокусировку УЗ луча, предварительное усиление и динамическую фокусировку эхо-сигналов.
Предварительно усиленные сигналы от датчиков поступают на вход общего (основного) усилителя, в котором осуществляется временная автоматическая регулировка усиления (ВАРУ) и ручная регулировка с пульта управления.
Усиленные аналоговые эхо-сигналы направляются в цифровой конвертор изображения, в котором производится их цифровое преобразование, запись в буферную память и множество других весьма сложных преобразований. Из конвертора изображения цифровая информация переписывается в экранное ОЗУ.
В блоке управления выводом она с помощью ЦАП снова преобразуется в аналоговый сигнал, который подается на модулятор ЭЛТ, формируя изображение.
Микропроцессорная система (микроЭВМ) управляет практически всеми блоками, синхронизируя их работу.
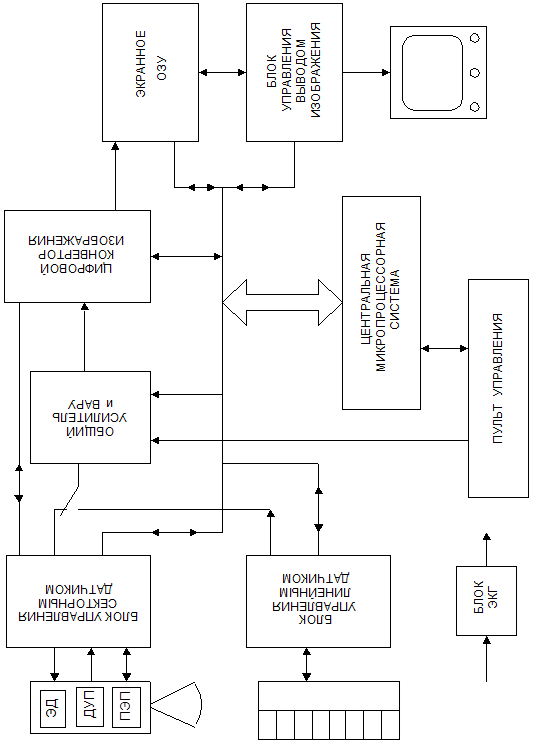 |
Из-за их большого количества часть функций она делегирует местным МПС – микроконтроллерам, работа которых инициируется при запуске программы главной МПС, и в дальнейшем они работают автономно. Приведенная структурная схема достаточно условна и может быть изменена, например, экранное ОЗУ может быть включено в конвертор изображения и т.п.
Блок управления механическим секторным датчиком
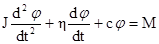
Несмотря на относительную простоту механического датчика его блок управления достаточно сложен. Это объясняется прежде всего тем, что датчик является инерционной системой и управляющее воздействие на двигатель не может однозначно определять угловое положение пьезопреобразователя. Движение вращающихся частей датчика описывается дифференциальным уравнением второго порядка
 , (1)
, (1)
где j - угол поворота, J – суммарный момент инерции,  - коэффициент трения, с - коэффициент упругости, М – момент на валу двигателя (М = к1iвх). Идеальной была бы регулировочная характеристика j = к2М. Чтобы к ней приблизиться, применяют различные корректирующие цепочки и отрицательную обратную связь по углу.
- коэффициент трения, с - коэффициент упругости, М – момент на валу двигателя (М = к1iвх). Идеальной была бы регулировочная характеристика j = к2М. Чтобы к ней приблизиться, применяют различные корректирующие цепочки и отрицательную обратную связь по углу.
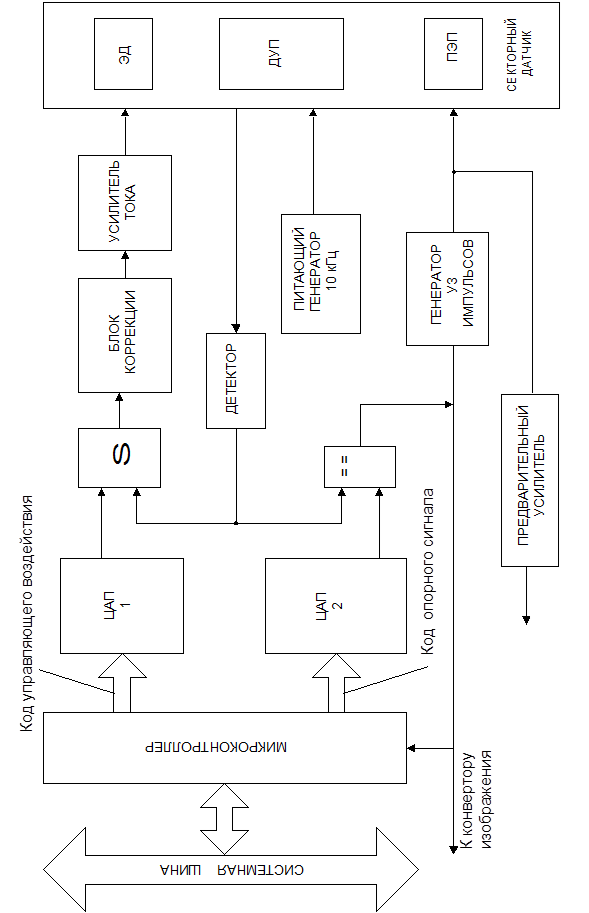
Структурная схема блока управления приведена на рис.2. Параметры режима управления загружаются в микроконтроллер при запуске программы. Он выдает коды управляющего и опорного сигналов на цифро-аналоговые преобразователи ЦАП1 и ЦАП2, которые вырабатывают несколько отличающиеся по форме сигналы. Сигнал ЦАП1 аппроксимирован функцией arctg (t), которая является наиболее оптимальной для динамики подвижной системы. Датчик углового положения ДУП, представляющий собой трансформаторный преобразователь, запитывается от источника переменного тока повышенной частоты и выдает сигнал, пропорциональный углу поворота. Электродвигатель ЭД секторного датчика запитывается током, который является результатом суммирования управляющего сигнала ЦАП1 и сигнала обратной связи, поступающего от детектора. Далее суммарный сигнал в блоке коррекции разветвляется по звеньям – пропорциональному, дифференцирующему и интегрирующему – и затем снова суммируется. Благодаря введению корректирующих звеньев и обратной связи по углу поворота удается свести до минимума влияние первого и второго членов уравнения (1), т.е. максимально приблизить реакцию  к управляющему воздействию.
к управляющему воздействию.
Для посылки зондирующих УЗ импульсов и записи информации по нужному адресу необходимо вырабатывать специальные импульсы с учетом фактического положения ПЭП. Такие импульсы формируются с помощью выходного напряжения датчика углового положения и ЦАП2. На его выходе создается напряжение, близкое по форме к напряжению датчика углового положения (рис 3). Оба напряжения подаются на входы компаратора. В моменты равенства напряжений происходит переключение компаратора, который вырабатывает импульсы запуска. Они запускают генератор зондирующих импульсов и поступают в блок конвертора, где формируют номер луча для адресации памяти. Таким образом, адресация ОЗУ при использовании механического датчика осуществляется непосредственно под его управлением.
Контроллер, кроме того, определяет тип подключенного датчика. Для этого в разъеме датчика устанавливают специальную кодирующую перемычку.
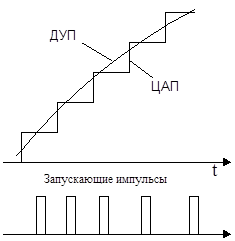 |
Рис. 3
 |
|
из
5.00
|
Обсуждение в статье: Блок управления механическим секторным датчиком |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы