 |
Главная |


Цикловая (кадровая) синхронизация.
|
из
5.00
|
1. Необходимость синхронизации.
При передаче цифровой информации в качестве переносчиков используются прямоугольные импульсы, формируемые в передатчике в соответствии с информационными битами. При этом длительность импульсов, определяющая физическую скорость передачи, задаётся с помощью тактового генератора, формирующего последовательность коротких импульсов, расстояние между которыми равно длительности канального импульса (рис. 1,b)
Рис. 1. Тактовая последовательность, определяющая длительность канальных импульсов
Посредством этих тактовых импульсов формируется последовательность прямоугольных импульсов (рис. 2), соответствующая битовой последовательности (рис. 1,а).
Рис. 2. Последовательность канальных импульсов
Этой последовательностью осуществляется, например, фазовая манипуляция несущего колебания (несущей).
ФМ колебание, сформированное в передатчике (рис. 3), передаётся в линию связи.
Рис. 3. ФМ сигнал на выходе передатчика
В линии связи, особенно в радиоканале, на сигнал воздействуют различные помехи, искажая его и приводя к потере информации.
В простейшем случае помехи являются аддитивными, суммирующимися с полезным сигналом и смесь сигнала и помехи на выходе линии связи (на входе приёмника) может быть представлена в виде
Z(t) = sпер(t) + n(t).
Помеха n(t) может быть любой, но чаще всего используют модель в виде «белого» гауссового шума, который вносит наибольшие искажения (рис. 4)
Рис. 4. Белый гауссов шум
Шум называется белым потому, что частоты составляющих его колебаний равномерно распределены на оси от 0 до бесконечности.
Плотность вероятности гауссового (нормального) распределения (рис. 5) имеет вид
 .
.
Здесь x – значение случайной величины на интервале от -∞ до +∞;
σ – среднеквадратическое значение помехи (аналог амплитуды);
μ – среднее значение помехи.
σ 2 = D называется дисперсией помехи и характеризует её разброс вокруг среднего значения.
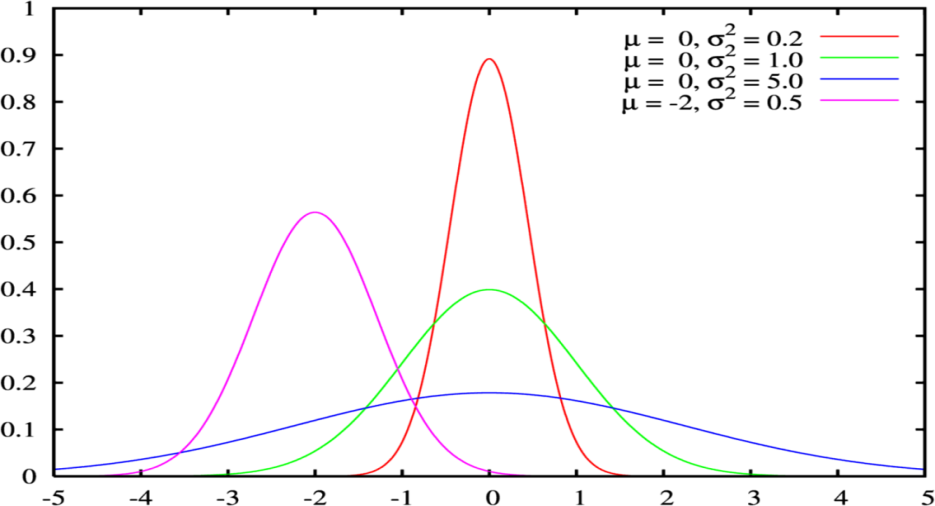
Рис. 5. Плотность вероятности гауссового (нормального) распределения при различных значениях σ и μ
Шумы определяют емкость канала и задают частоту ошибок при передаче цифровых данных. Шум по своей природе нестабилен и можно говорить лишь о том, что его величина с некоторой вероятностью лежит в определенном интервале значений. Плотность вероятности w (x) определяет вероятность того, что случайный сигнал X имеет значение амплитуды в интервале между x и x+ d x.
При передаче ФМ сигнала по каналу с помехами смесь сигнала и помехи Z(t) на входе приёмника имеет вид (рис. 6).
Из рисунка видно, что помехи в линии искажают, прежде всего, амплитуду сигнала, а затем частоту и фазу.
Поскольку для передачи информации в подавляющем большинстве случаев используется фазовая модуляция, то и будем рассматривать искажения фазы.
Рис. 6. Смесь сигнала и помехи на входе приёмника
Под воздействием помех в канале искажения фазы распределены по равномерному закону, график плотности вероятности которого имеет вид (рис. 7)
Рис. 7. Равномерное распределение плотности вероятности
Здесь a и b – границы случайной величины. Для фазы они равны –π и π соответственно:
Плотность вероятности случайной величины рассчитывается по формуле f ( x ) = 1/( b - a ).
Среднее значение равно μ = (a + b)/2.
Дисперсия D = (b - a)2/2, а вероятность попадания случайной величины x в интервал [a … b] P(x) = (x - a)/(b - a).
Для фазы сигнала μ = 0; D = 2 π2; среднеквадратическое отклонение σ = √D = π√2. Вероятность попадания фазы в интервал – π… π P(x) = (x + π)/2 π.
Случайный процесс изменения фазы в канале изображён на рис. 8.
Рис. 8. Процесс изменения фазы сигнала в канале с помехами
Из всего вышесказанного следует, что для того, чтобы обеспечить максимальную помехоустойчивость при заданной скорости передачи информации, необходимо обеспечить синхронную и синфазную работу передатчика и приёмника. Иными словами для достижения максимальной помехоустойчивости должна быть обеспечена синхронизация передачи данных.
Синхронный способ передачи данных - способ передачи цифровых данных по последовательному интерфейсу, при котором приемнику и передатчику известно время передачи данных, то есть, передатчик и приемник работают синхронно, в такт.
Синхронизация приемника и передатчика достигается либо путем ввода синхронизирующей последовательности (например, в начале передачи данных передается детерминированный сигнал с известным переключением состояний из «нуля» в «единицу», по времени прихода осуществляется каким-либо образом синхронизация приемника и передатчика.
При этом должна быть обеспечена синфазность работы опорных генераторов передатчика и приёмника.
Синфазность означает совпадение по фазе двух или нескольких периодическихколебаний. Опираясь на более общее понятие когерентности, синфазность можно определить как частный случай когерентности, при которой разность фаз колебаний постоянна и равна нулю (рис. 9).
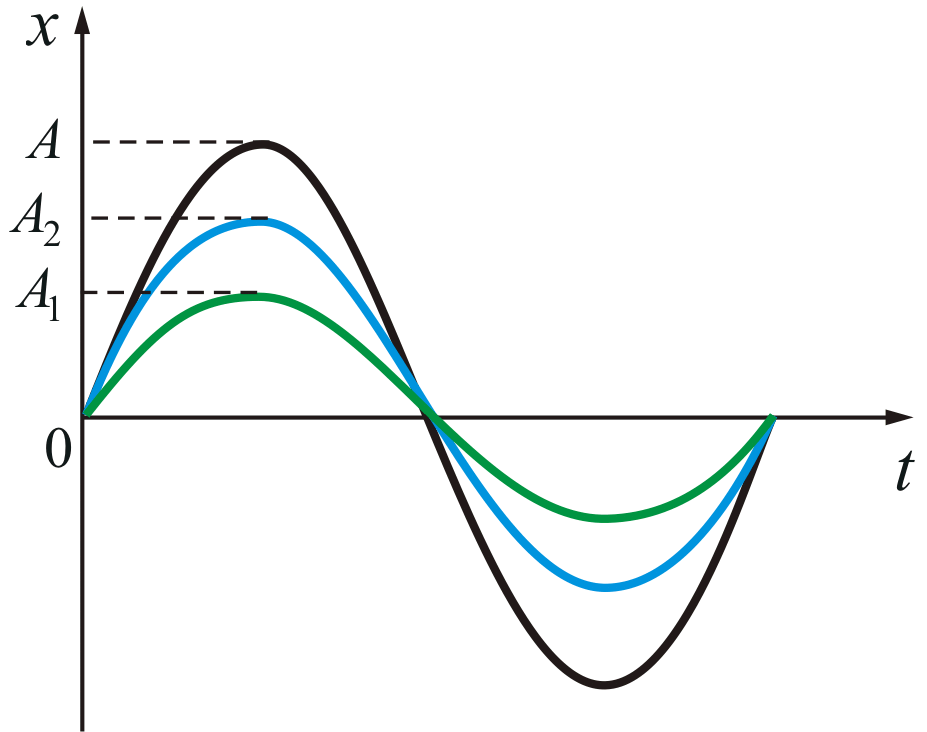
Рис. 9. Синфазные колебания
Когерентность (от лат. cohaerens - находящийся в связи) согласованное протекание во времени нескольких колебательных или волновых процессов. Если разность фаз двух колебаний остается постоянной во времени или меняется по строго определенному закону, то колебания называются когерентными (рис. 9-10). Например, два колебания x1(t) = A1sin(ω1t) и x2(t) = A2sin(ω1t), формируемые разными источниками, являются когерентными, поскольку у них одинаковые частоты и фазы. Колебания x1(t) = A1sin(ω1t ) и x2(t) = A2cos(ω1t ) тоже когерентны, так как у них одинаковы частоты, а разность фаз, равная π/2, постоянна во времени.
Колебания, у которых разность фаз изменяется беспорядочно и быстро по сравнению с их периодом, называются некогерентными.
Рис. 10. Когерентность
Для цифровых систем передачи информации когерентность означает совпадение по частоте и фазе колебаний опорных генераторов передатчика и приёмника.
При несоблюдении требований по синхронизации в приёмнике сигнал после детектирования может быть , например, таким, как показано на рис. 11.
Рис. 11. Детектированный сигнал в приёмнике
Восстановленная (регенерированная) последовательность прямоугольных импульсов будет иметь вид, изображённый на рис. 12, a. Сравнивая её с передаваемой последовательностью (рис. 12, b), можно увидеть, что она отличается от передаваемой как длительностью импульсов, так и их полярностью. Возникшие искажения привели к потере информации.
Рис. 12. Сравнение переданной и принятой импульсных последовательностей
Для правильного детектирования и восстановления принятых прямоугольных импульсов необходимо:
- сформировать в приёмнике несущее колебание, совпадающее по частоте и фазе с передаваемой несущей. Это осуществляется генерированием синусоидального колебания в опорном генераторе приёмника, причём частота этого колебания известна заранее и проблем здесь нет. Другое дело фаза. Под действием помех фаза сигнала может принимать любое значение в интервале –π … π;
- определить положение на временной оси начало и конец интервала принятия решения о полярности восстанавливаемого импульса;
- определить положение на временной оси начало и конец интервала кадра (пакета) передаваемой информации.
В связи с вышеизложенным в цифровых системах передачи информации должна быть обеспечена:
- синхронизация генераторов несущего колебания передатчика и приёмника. Это особенно важно при использовании фазовой манипуляции (BPSK, QPSK) или минимальной частотной манипуляции (GMSK);
- синхронизация временных границ принимаемых и передаваемых импульсов (тактовая синхронизация);
- синхронизация передатчика и приёмника по началу кодовых слов (в простейших системах передачи) или по началу и концу групповых сигналов (кадров, пакетов, дейтаграмм) в сложных системах – цикловая или кадровая синхронизация;
- суперкадровая синхронизация, при которой синхронизируемый блок данных состоит из большого числа кадров.
В компьютерных сетях пакет - это определённым образом оформленный блок данных, передаваемый по сети в пакетном режиме. Компьютерные линии связи, которые не поддерживают пакетный режим, как, например, традиционная телекоммуникационная связь точка-точка, передают данные просто в виде последовательности байтов, символов или битов поодиночке. Если данные сформированы в пакеты, битрейт коммуникационной среды можно более эффективно распределить между пользователями, чем в сети с коммутацией каналов. Битрейт это количество информации передаваемой либо сохраняемой за определённый промежуток времени.
При использовании сетей с коммутацией пакетов можно надёжно гарантировать пороговый битрейт, ниже которого он опускаться не будет.
Термин пакет распространяется на любое сообщение, форматированное как пакет, тогда как термин дейтаграмма обычно используется для пакетов «ненадёжных» служб. «Надёжной» является служба, которая уведомляет пользователя, если доставка не удалась, тогда как «ненадёжная» такого уведомления пользователя не делает. Например, IP не обеспечивает надёжный сервис, а TCP и IP вместе его обеспечивают, тогда как UDP с IP надёжный сервис не обеспечивают. Все эти протоколы используют пакеты, но UDP-пакеты, как правило, называют дейтаграммами.
Термин «кадр» («frame») относится к блоку данных, передаваемых по сети. Размер и структура кадра определяются используемым в сети протоколом аппаратного уровня, например, Ethernet, Token Ring и т.п. Механизм передачи кадров в сети называется протоколом.
Нормы синхронизации для современных сетевых технологий
| Сетевой элемент | Нормы по частотной синхронизации | Нормы по фазовой синхронизации |
| cdma2000 BS | 5*e-8 | 3 мкс |
| GSM | 5*e-8 | - |
| UMTS-TDD BS | 5*e-8 | 1,25 мкс |
| UMTS-FDD BS | 5*e-8 | 1 мкс |
| WiMax BS | 5*e-8 | 1 мкс |
| LTE BS | 5*e-8 | - |
| EPON/GPON OLT | 1*e-11 | - |
| SDH/SONET, ATM | 1*e-11 | - |
Примечания:
1. е-8 = 10-8.
2. Стандарт CDMA2000 – это представитель стандартов сотовой связи третьего поколения (3G). Он также известен под именами IMT-CDMA Multi-Carrier или IS-2000. Основной целью создания CDMA2000 было увеличение пропускной способности и максимально разрешенных скоростей передачи данных, по сравнению с предшествующим стандартом CDMA One.
3. GSM (от названия группы Groupe Spécial Mobile, позже переименован в Global System for Mobile Communications) (русск. СПС-900) — глобальный стандарт цифровой мобильной сотовой связи, с разделением каналов по времени (TDMA) и частоте (FDMA).
4. UMTS (англ. Universal Mobile Telecommunications System — Универсальная Мобильная Телекоммуникационная Система) — технология сотовой связи, разработана Европейским Институтом Стандартов Телекоммуникаций (ETSI) для внедрения 3G в Европе. FDD и TDD - частотный и временной дуплексы соответственно.
5. WiMAX (англ. Worldwide Interoperability for Microwave Access) — телекоммуникационная технология, разработанная с целью предоставления универсальной беспроводной связи на больших расстояниях для широкого спектра устройств (от рабочих станций и портативных компьютеров до мобильных телефонов).
6. LTE – сотовые системы связи поколения 4G.
7. EPON/GPON OLT . EPON – Ethernet Passive Optical Network (пассивная оптическая сеть Ethernet) — устаревшая технология, основанная на стандарте IEEE 802.3ah (принят в 2004 году). GPON – Gigabit Passive Optical Network (гигабитная пассивная оптическая сеть) — современная технология (стандарт G.984), которая продолжает активно развиваться.
Ключевое отличие технологий GPON и EPON – скорость передачи нисходящего потока (downlink): GPON — 2.5 Гбит/с, EPON – 1.25 Гбит/с.
8. SDH/SONET, ATM. Технология синхронной цифровой иерархии первоначально была разработана под название «Синхронные оптические сети» - NETs, SONET. В настоящее время улучшен и получил название SDH.
2. Синхронизация несущей частоты (фазирование).
Необходимость синхронизации обусловлена недостаточной стабильностью несущей частоты передатчика и генераторов приемника, также изменением времени распространения сигнала между абонентами τ(t). Основным звеном ряда устройств синхронизации цифровых систем связи является система фазовой автоматической подстройки частоты(ФАПЧ).
Фазовая автоподстройка частоты - система автоматического регулирования, подстраивающая фазу управляемого генератора так, чтобы она была равна фазе опорного сигнала, либо отличалась на известную функцию от времени. Регулировка осуществляется благодаря наличию отрицательной обратной связи (рис. 13). Выходной сигнал управляемого генератора сравнивается на фазовом детекторе с опорным сигналом, результат сравнения используется для подстройки управляемого генератора.
Система ФАПЧ используется для частотной и фазовой модуляции и демодуляции, умножения и преобразования частоты, частотной фильтрации, выделения опорного колебания для когерентного детектирования и в других целях.
ФАПЧ сравнивает фазы входного и опорного сигналов и выводит сигнал ошибки, соответствующий разности между этими фазами. Сигнал ошибки проходит далее через фильтр низких частот и используется в качестве управляющего для генератора, управляемого напряжением (ГУН), обеспечивающего отрицательную обратную связь. Если выходная частота отклоняется от опорной, то сигнал ошибки увеличивается, воздействуя на ГУН в сторону уменьшения ошибки. В состоянии равновесия выходной сигнал фиксируется на частоте опорного.

Рис. 13. Схема ФАПЧ
ФАПЧ широко используется в радиотехнике, телекоммуникациях, компьютерах и других электронных устройствах. Данная система может генерировать сигнал постоянной частоты, восстанавливать сигнал из зашумлённого коммуникационного канала или распределять сигналы синхронизации в цифровых логических схемах, таких, как микропроцессоры, ПЛИС и т.д. Поскольку интегральная схема может полностью реализовать блок ФАПЧ, этот метод часто используется в современных электронных устройствах с выходными частотами от долей герца до многих гигагерц.
Если систему ФАПЧ рассматривать как четырехполюсник, в котором выходным сигналом являются колебания подстраиваемого генератора, то по своим свойствам она подобна следящему полосовому фильтру с частотной характеристикой K(jω).
Работа такого следящего фильтра характеризуется следующими параметрами:
1. Полосой удержания Fу, характеризующей максимально допустимое отклонение частоты входного сигнала от собственной частоты ГУН при условии обеспечения состояния синхронизма. Под собственной частотой ГУН понимается частота системы ФАПЧ в установившемся режиме в отсутствие управляющего напряжения.
2. Полосой захватаDFз - максимальной расстройкой между частотой входного колебания и частотой подстраиваемого генератора, при которой после включения ФАПЧ начинает следить за фазой входного колебания (входит в синхронизм). При этом предполагается, что в начальный момент времени отсутствует режим синхронизации, а собственная частота ГУН и частота входного сигнала различны.
3. Временем вхождения в синхронизм Тсх, которое характеризует продолжительность переходного процесса от момента появления сигнала на входе до момента установления равенства частот входного сигнала и сигнала ГУН.
Для ФАПЧ желательно увеличивать полосу захвата, но это приводит к увеличению уровня шумов в системе. Уменьшение полосы захвата приводит к усложнению работы системы и увеличению времени ввода в синхронизм Tсх.
Основными характеристиками систем ФАПЧ являются следующие:
- полоса удержания ΔfУ - область начальных расстроек ГУН, внутри которой система ФАПЧ эффективно работает в режиме удержания;
- полоса захвата ΔfЗ - область начальных расстроек ГУН, внутри которой система ФАПЧ эффективно работает в режиме захвата;
- время захвата tЗ, представляющее собой время втягивания системы ФАПЧ в режим синхронизации. Время захвата существенно зависит от значения начальной расстройки между частотой входного колебания и частотой колебания ГУН.
Область захвата определяется как диапазон частот, сосредоточенный вокруг собственной частоты ГУН fn, в котором система ФАПЧ в состоянии произвести захват частоты и войти в синхронизм с внешним входным сигналом. В зависимости от конструкции системы ФАПЧ, ширины полосы пропускания фильтра нижних частот и усиления петли обратной связи, область захвата находится как правило, в диапазоне между 0.5fn …1.7fn. Иногда область захвата называют областью вхождения в синхронизм.
Полоса захвата частоты - полосы частот захвата слева или справа от опорной частоты, которые, как правило, симметричны (т. е. область захвата в 2 раза шире полосы захвата частоты). Области захвата, удержания и полосы захвата и удержания показаны в форме частотной диаграммы на рис. 15. Самая низкая частота, на которой система ФАПЧ может произвести захват, называется нижним пределом захвата fзн, а самая высокая частота - верхним пределом захвата fзв.
Область удержания определяется как диапазон частот, сосредоточенный вокруг собственной частоты ГУН, в котором система ФАПЧ может поддерживать режим синхронизма с внешним опорным сигналом. При этом предполагается, что система ФАПЧ первоначально захватила и удерживает частоту входного сигнала. Область удержания также известна как область слежения. Область удержания - это диапазон частот, в котором после того, как произошел захват частоты, система ФАПЧ будет точно отслеживать частоту внешнего опорного сигнала. Полоса удержания (синхронизации) - диапазон частот в области удержания слева или справа от опорной частоты (т. е. область удержания в 2 раза шире полосы удержания). Связь между областью удержания и полосой удержания показана в виде частотной диаграммы на рис. 14.
Рис. 14. Области захвата и удержания частоты системы ФАПЧ
Область захвата никогда не бывает больше и почти всегда меньше, чем область удержания.
Взаимосвязь между областями захвата и удержания и полосами захвата и удержания частоты показана в форме частотной диаграммы на рис. 14. Обратите внимание, что область удержания больше или равна области захвата, а полоса удержания больше или равна полосе захвата частоты.
3. Тактовая синхронизация.
Устройства тактовой синхронизации УТС обеспечивают синхронную работу тактовых генераторов приемной и передающей частей ЦСП. Только в этом случае генератор приемной части будет вырабатывать управляющие сигналы, совпадающие по частоте и времени с импульсными последовательностями, поступающими в приемное оборудование ЦСП из линейного тракта, обеспечивая тем самым правильную цифровую обработку сигналов (рис. 15).
Рис. 15. Подстройка тактовой частоты генератора приёмника
Следовательно, основная задача УТС - исключить расхождение частот ГО передачи и приема или, в крайнем случае, обеспечить небольшую величину этого расхождения. Как известно, в аналоговых системах передачи для этих целей применяют, в основном, технические решения, обеспечивающие стабилизацию частоты задающих генераторов приемного и передающего оборудования (например, кварцевую стабилизацию).
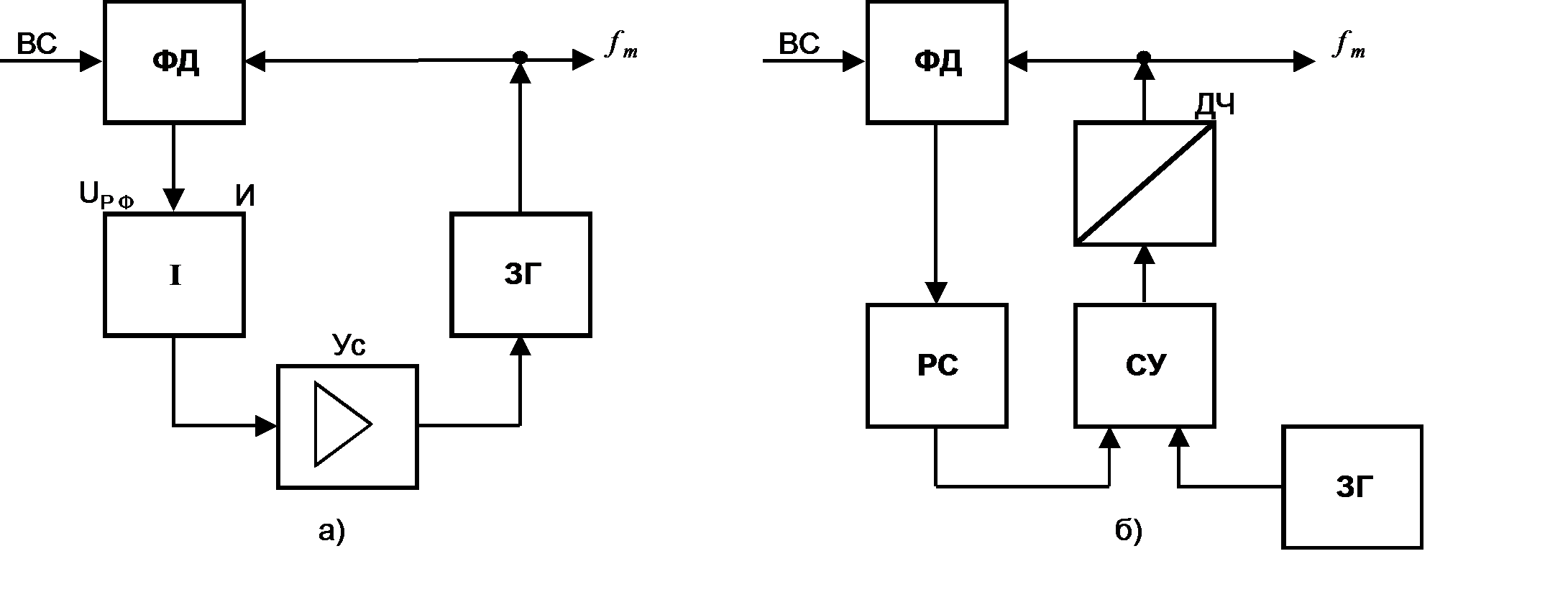
Такое фазирование возможно реализовать различными способами, два из которых показаны на рис. 16.
Рис. 16. Структурные схемы УТС с активной фильтрацией тактовой частоты
Реализация современных ЦСП без устройств тактовой синхронизации (фазирования по посылкам) невозможна. В ЦСП к устройствам тактовой синхронизации предъявляются следующие требования:
1) высокая точность подстройки частоты и фазы управляющего сигнала ЗГ приемной части;
2) малое время вхождения в синхронизм;
3) сохранение состояния синхронизма при кратковременных перерывах связи.
Различают две группы УТС, отличающиеся методом использования синхросигналов. К первой группе относятся устройства с синхронизацией по специальному синхросигналу. Этот метод усложняет построение линейного тракта ЦСП и генераторного оборудования, к тому же точность установки фазы управляющих сигналов в большой степени связана с нелинейными искажениями и неравномерностью частотных характеристик линейного тракта. Ко второй группе относятся методы подстройки фазы управляющих импульсов под основной принимаемый сигнал. Такую подстройку можно осуществить либо по специальным синхроимпульсам, либо по рабочим импульсам (элементам кодовых комбинаций цикла). Применение специальных синхроимпульсов снижает пропускную способность системы, поэтому на практике нашел применение метод тактовой синхронизации по рабочим импульсам.
Наличие длинных серий одноимённых импульсов, например, 0111111111111110 110000000000000001 существенно усложняет процесс тактовой синхронизации и приводит, в конце концов, к её срыву.
В настоящее время широко используется метод синхронизации, основанный на выравнивании вероятности появления «1» и «0» в информационной последовательности, что даёт особенно хорошие результаты при наличии длинных серий однополярных импульсов.
К таким методам относится либо скремблирование либо применение специальных самосинронизирующихся кодов.
Скремблирование.
Суть скремблирования заключается в побитном изменении проходящего через систему потока данных. Практически единственной операцией, используемой в скремблерах является XOR – «побитное исключающее ИЛИ» (сложение по модулю 2). Правило сложения, например, такое
bn=anÅ(bn-2Åbn-5).
Здесь ai – информационные, а bi - канальные символы.
Параллельно прохождению информационного потока в скремблере по определенному правилу генерируется поток бит – кодирующий поток. Как прямое, так и обратное шифрование осуществляется наложением по XOR кодирующей последовательности на исходную.
Схема скремблера, реализующего данный алгоритм, приведена на рис. 17.
Рис. 17. Схема скремблера
Генерация кодирующей последовательности бит производится циклически из небольшого начального объема информации – ключа по следующему алгоритму. Из текущего набора бит выбираются значения определенных разрядов и складываются по XOR между собой. Все разряды сдвигаются на 1 бит, а только что полученное значение ("0" или "1") помещается в освободившийся самый младший разряд. Значение, находившееся в самом старшем разряде до сдвига, добавляется в кодирующую последовательность, становясь очередным ее битом (рис. 17).
Применительно к телекоммуникационным системам скремблирование повышает надёжность синхронизации устройств, подключённых к линии связи (обеспечивает надёжное выделение тактовой частоты непосредственно из принимаемого сигнала), и уменьшает уровень помех, излучаемых на соседние линии многожильного кабеля. Другая область применения скремблеров — защита передаваемой информации от несанкционированного доступа.
Для алгоритмов скремблирования исключительно важны скорость работы и случайный характер последовательности, чтобы его нельзя было восстановить в случае перехвата противником. Процесс скремблирования может включать в себя добавление определённых компонент к исходному сигналу либо изменение важных частей сигнала для того, чтобы усложнить восстановление вида исходного сигнала либо для придания сигналу определённых статистических свойств.
Недостатком скремблирования является то, что длинные серии одноимённых импульсов разбиваются на более короткие, но всё же серии и надёжность тактовой синхронизации возрастает, но не много (примерно 25% - 30%).
Более результативным с точки зрения увеличения надёжности тактовой синхронизации является применение самосинхронизирующихся кодов, таких как, например, манчестерское кодирование.
При манчестерском кодировании каждый такт делится на две части. Информация кодируется перепадами потенциала в середине каждого такта. Единица кодируется перепадом от низкого уровня сигнала к высокому, а ноль — обратным перепадом (по стандарту IEEE 802.3 (рис. 18).
Рис. 18. Манчестерское кодирование
В начале каждого такта может происходить служебный перепад сигнала, если нужно представить несколько единиц или нулей подряд. Так как сигнал изменяется по крайней мере один раз за такт передачи одного бита данных, то манчестерский код обладает хорошими самосинхронизирующими свойствами.
|
из
5.00
|
Обсуждение в статье: Цикловая (кадровая) синхронизация. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы