 |
Главная |


Микропроцессорные системы управления двигателем (МСУД) с искровым зажиганием: назначение, классификация, структура систем и основы функционирования
|
из
5.00
|
ОТЧЁТ
по практике
« Практика по получению первичных профессиональных умений и навыков, в том числе первичных умений и навыков научно-исследовательской деятельности»
Разработал студент гр. ПТЗ-50314 __________________ / Павлов С.Ф. /
(подпись)
Руководитель практики от университета
канд. техн. наук, доцент _______________ / Осипов Г.В./
(подпись)
Отчёт защищён с оценкой « ________________» « ___» __________20__г.
Члены комиссии ______________________ /____________________/
(подпись)
_____________________ /_____________________/
(подпись)
Курган 2019
Содержание
1 Микропроцессорные системы управления двигателем (МСУД) с
искровым зажиганием: назначение, классификация, структура систем и
основы функционирования 3
1.1 Назначение микропроцессорных систем управления двигателем 3
1.2 Классификация микропроцессорных систем управления двигателем 9
1.3 Структура и основы функционирования микропроцессорных
систем управления двигателем 11
2 Методы организации производства, общая технологическая схема по ремонту автомобилей АТП. Основные факторы, определяющие объем работ
2.1 Методы организации производства 17
2.2 Общая технологическая схема по ремонту автомобилей АТП 30
2.3 Основные факторы, определяющие объем и качество работ 32
Список литературы 34
Микропроцессорные системы управления двигателем (МСУД) с искровым зажиганием: назначение, классификация, структура систем и основы функционирования
1.1 Назначение микропроцессорных системы управления двигателем
Микропроцессорные системы управления двигателем (МСУД) стали устанавливать на автомобили с середины 80-х годов прошлого века. Система управляет двигателем по оптимальным характеристикам и не требует каких-либо регулировок и обслуживания в эксплуатации, т.е. автомобиль оборудуется системой внутреннего диагностирования, в которой на колодку выводятся следующие контрольные точки системы электрооборудования: «+» аккумуляторной батареи, клемма «30» генератора, корпус («масса» ) автомобиля, клеммы низкого напряжения катушки зажигания и датчик ВМТ поршня первого цилиндра. С помощью мотор-тестера система диагностирования позволяет определить: уменьшение компрессии в цилиндрах; степень разреженности и состояние аккумуляторной батареи; исправность генератора, стартера и системы зажигания.
Системы (управления, диагностирования) довольно сложные. Необходимо применять их только при максимальной надежности комплектующих изделий.
МСУД включает коммутатор и контроллер с различными датчиками. Применяемые у нас МСУД предназначены для управления зажиганием (моментом и энергией искрообразования) и электромагнитным клапаном карбюратора.
Управление зажиганием по оптимальным характеристикам осуществляется в зависимости от:
• частоты вращения коленчатого вала двигателя;
• давления во впускном коллекторе;
• температуры охлаждающей жидкости;
• положения дроссельной заслонки карбюратора.
Управление электромагнитным клапаном карбюратора осуществляется в зависимости от частоты вращения коленчатого вала двигателя и положения дроссельной заслонки карбюратора.
Электромагнитный запорный клапан топливного жиклера холостого хода появился у нас впервые на ВАЗ-2103 (1973 г.). Он ограничивает поступление топлива и обеспечивает мгновенную остановку двигателя после выключения зажигания, т.е. предотвращает работу горячего двигателя после выключения зажигания. На автомобилях ВАЗ-2108, -2109 электромагнитный запорный клапан и концевой выключатель регулировочного винта количества смеси холостого хода в комплекте с электронным блоком управления уже составляли экономайзер принудительного холостого хода (ЭПХХ). ЭПХХ — первое управляемое устройство в системе питания карбюраторного двигателя.
ЭПХХ предназначен для экономии бензина при режимах принудительного холостого хода, когда педаль « газа» отпущена, а вращение коленчатого вала происходит принудительно « от колес» (торможение двигателем). При этом в связи с большим разряжением двигатель просто «высасывает» бензин из карбюратора.
Если электромагнитный клапан реагировал только на включение (открыт) и выключение (закрыт) зажигания, то при ЭПХХ клапан дополнительно отключается (закрыт) при 2100 мин-1, а включается (открыт) при 1900 мин~1. Блок управления отключает клапан только в том случае, если замкнут концевой выключатель карбюратора, т.е. если не нажат акселератор. При нажатом акселераторе клапан отключаться не будет (или включится, если был отключен).
Микрокомпьютер в МСУД выполняет следующие функции:
• с помощью датчиков измеряет частоту вращения коленчатого вала двигателя, давление во впускном коллекторе, температуру охлаждающей жидкости и определяет степень открытости дроссельной заслонки карбюратора;
• на основе информации, полученной от датчиков, выбирает из запоминающего устройства оптимальные углы опережения зажигания и требуемое состояние (закрытое или открытое) электромагнитного клапана карбюратора;
• производит интерполяцию (расчет промежуточных значений) углов опережения зажигания и вырабатывает управляющие сигналы для работы коммутатора.
Рассмотрим основные элементы МСУД: коммутатор и микрокомпьютер. В связи с миниатюризацией коммутатора его часто объединяют с микрокомпьютером. Такая схема МСУД, когда микрокомпьютер объединяет в себе функции микрокомпьютера и коммутатора.
Датчики синхронизации индуктивные, они генерируют импульс напряжения при прохождении в их магнитном поле штифта или зуба. Установочные зазоры датчиков в пределах 0,3—1,2 мм. Датчик начала отсчета 3 установлен на картере сцепления так, что он генерирует импульс напряжения в момент прохождения в его магнитном поле маркерного штифта, запрессованного в маховик. И этот момент соответствует положению ВМТ поршней первого и четвертого цилиндров (интервал между импульсами 360»). Датчик угловых импульсов 12 реагирует на зубья маховика, т.е. если число зубьев 128, то сигнал посылается 128 раз за оборот коленчатого вала или через 2,8125 градуса.
Датчик положения дроссельной заслонки и электромагнитный клапан относятся к карбюратору. Датчик сообщает о положении дроссельной заслонки (открыта, закрыта). Электромагнитный клапан, как отмечалось, управляется микрокомпьютером в зависимости от частоты вращения коленчатого вала и положения дроссельной заслонки.
Иногда с целью увеличения надежности работы системы зажигания на каждый цилиндр устанавливают свою катушку, чтобы получить бесконтактное распределение высоковольтного напряжения при двухканальном коммутаторе. Одна катушка генерирует высоковольтные импульсы на свечи первого и четвертого цилиндров, а другая — на свечи второго и третьего цилиндров. Причем искровой разряд происходит одновременно на двух свечах зажигания, т.е. на два оборота коленчатого вала (4 такта) в каждом цилиндре происходит два искровых разряда: один рабочий (конец такта сжатия), а второй холостой (конец такта выпуска отработавших газов).
Рассмотренная МСУД, применяемая на части автомобилей ВАЗ, является наиболее простой как по объектам управления системой зажигания (не полностью электронная) и питания (карбюратор), так и по параметрам, учитываемым при обеспечении оптимального управления двигателем. К более сложным МСУД относится, например, система фирмы Bosch «Мотроник» (модификации 1.1; 1.3; 1.7; 2.7; 3.1; МЕ и др.) (рис. 21).
Цифровая система управления двигателем «Мотроник» объединяет системы управления зажиганием и питанием (впрыском). Управление осуществляется контроллером, представляющим собой специализированный микрокомпьютер, обрабатывающий по программе импульсы датчиков систем зажигания и питания согласно заложенному алгоритму.
В названии — «микропроцессорная система управления двигателем» (МСУД) упомянут микропроцессор, который представляет собой « мыслящую» часть микрокомпьютера.
При рассмотрении системы «Мотроник» воспользуемся терминологией, принятой в Европе. Главная часть системы управления двигателем — контроллер. В состав контроллера входит микрокомпьютер, а в него, в свою очередь, входит процессор 8.
Система «Мотроник» объединяет в себе систему впрыска топлива «Джетроник» (модификации: К, КЕ, L, LЕ, 1.3, 14, LН, LH2.2 и др.) и систему полного электронного зажигания (У32) без распределителя с числом катушек зажигания, равным числу цилиндров.
Контроллер системы «Мотроник» выполняет следующие функции:
• управление системой впрыска топлива;
• управление системой зажигания и регулирование момента зажигания;
• распределение тока высокого напряжения;
• управление пуском холодного двигателя;
• регулирование холостого хода двигателя;
• регулирование частоты вращения коленчатого вала двигателя;
• самодиагностика.
Для упрощения рассмотрения системы «Мотроник» в функциональной схеме контроллера выделено устройство управления (процессор), являющийся микрокомпьютером, что позволяет, не загромождая функциональную схему контроллера, показать отдельно функциональную схему микрокомпьютера.
Рассмотрим назначение основных датчиков системы «Мотроник».
Датчик положения коленчатого вала двигателя является общим для систем впрыска и зажигания. Он установлен на блоке цилиндров двигателя напротив зубчатого обода маховика и генерирует импульсы напряжения при прохождении в его магнитном поле обода маховика.
Датчик угловых импульсов установлен рядом с датчиком положения коленчатого вала двигателя и выдает на контроллер импульсы углового положения коленчатого вала, реагируя на зубья венца маховика. Одновременно по сигналам (импульсам) этого датчика можно определить положение поршней относительно ВМТ.
Датчик температуры охлаждающей жидкости имеет отрицательный температурный коэффициент, т.е. его сопротивление падает при увеличении температуры. Он установлен в головке цилиндров и выдает на контроллер сигналы температуры охлаждающей жидкости.
Датчик температуры поступающего воздуха также имеет отрицательный температурный коэффициент. Он встроен в измеритель расхода воздуха и с его выводов на контроллер поступают сигналы о температуре всасываемого воздуха.
Измеритель расхода воздуха определяет объем всасываемого воздуха за счет перемещения напорного диска, на оси которого установлен потенциометр, «преобразующий» угловое положение напорного диска в электрический сигнал. На основе информации, полученной от этого потенциометра, контроллер определяет нагрузку двигателя, поэтому измеритель расхода воздуха с потенциометром — это датчик нагрузки двигателя.
Появились датчики расхода (измерители массы) воздуха чисто электрические без громоздкой механической системы с напорным диском. Масса воздуха, поступающего в двигатель, измеряется по напряжению, необходимому для поддержания постоянной температуры проводника, чувствительного к изменениям температуры проходящего мимо него потока воздуха. Изменение « напряжения поддержания постоянной температуры» и является сигналом датчика расхода воздуха. Измерители массы воздуха, где воздух обдувает нагреваемый проводник, получили название термоанемо-метрических. Датчик углового положения дроссельной заслонки представляет собой потенциометр, установленный на оси заслонки.
Датчик детонации обеспечивает защиту двигателя от детонации. При этом имеется ввиду не детонация, вызванная низкооктановым бензином, а детонация, связанная с режимом работы двигателя. Например, при высокой температуре наружного воздуха в случае превышения нормальной рабочей температуры охлаждающей жидкости датчик детонации подает импульсы на контроллер, который вырабатывает команды на смещение угла опережения зажигания в сторону запаздывания до наступления детонации. Есть также датчики детонации, которые реагируют на увеличение жесткости сгорания смеси в цилиндрах двигателя. Общей особенностью датчиков детонации является то, что они предупреждают детонацию, реагируя на признаки скорого ее появления.
Система самодиагностики обнаруживает нарушения работы контроллера, элементов системы «Мотроник» и вводит их в запоминающее устройство контроллера.
При неисправности датчиков температуры охлаждающей жидкости, температуры поступающего воздуха, потенциометра измерителя расхода воздуха, контроллер начинает работать согласно величинам, принимаемым по «умолчанию» («умолчание» — это выбор программой среднего значения переменной при отсутствии указаний извне). После возвращения контроллера к нормальному режиму использование величин, принимаемых по « умолчанию» , прекращается.
Для облегчения поиска неисправностей предусмотрена возможность затребования текущих параметров с помощью контроллера и приведения в действие того или иного элемента системы.
Для поиска неисправностей, введенных в запоминающее устройство контроллера, необходимо использование диагностических стендов на фирменных СТОА.
В системе «Мотроник» установлено дополнительное оборудование для пуска холодного двигателя. Горючая смесь обогащается при помощи электромагнитной пусковой форсунки, которая работает до тех пор, пока температура охлаждающей жидкости остается ниже определенного значения. Продолжительность работы пусковой форсунки ограничивается тепловым реле времени.
Бесперебойная работа двигателя на холостом ходу во время прогрева обеспечивается специальным клапаном, управляемым регулятором холостого хода и подводящим к двигателю дополнительное количество воздуха, минуя дроссельную заслонку. При работе прогретого двигателя на холостом ходу воздух подводится также по дополнительному воздушному каналу параллельно дроссельной заслонке.
1.2 Классификация микропроцессорных систем управления двигателем
Различают:
1) Периферийные (интерфейсные) ОМКпредназначен для реализации простейших МП систем управления. Имеют малую производительность и малые габаритные размеры. В частности может использоваться периферийными устройствами ЭВМ (клавиатура, мышь и т.п.) К ним относятся: PIC – Micro Chip, VPS – 42 (Intel).
2) Универсальные 8–разрядные ОМКпредназначены для реализации МП систем малой и средней производительности. Имеют простую систему команд и большую номенклатуру встроенных устройств. Основные типы: MSC – 51 (Intel)MotorolaHC05 –HC012 и др.
3) Универсальный 16–разрядный ОМК. Предназначен для реализации систем реального времени средней производительности. Структура и система команд нацелены на скорейшую реакцию на внешние события. Наибольшее использование имеют в системах управления электродвигателями (мехатронные системы).
4) Специализированные 32–разрядные ОМКреализуют высокопроизводительную ARM архитектуру и предназначены для систем телефонии, передачи информации, телевидения и других , требующие высокоскоростной обработки информации. К типовым 16–разрядным ОМК относятся: MSC96/196/296 (Intel),C161–C167 (Siemens, Infineon), HC16Motorolaи др.
5) Цифровые сигнальные процессоры (DSP – Digital Signal Processor) предназначен для сложной математической обработки измеряемых сигналов в режиме реального времени. Широко используются в телефонии и связи. Основные отличия DSP: повышенная разрядность обрабатываемых слов (16,32,64 бита) и высокая скорость в формате с плавающей точкой (16flops). Производители: TexasInstruments (TMS320 и др.), AnalogDevice (ADSP 2181 и др.).
По области применения определилось три направления развития микропроцессоров:
· микроконтроллеры;
· универсальные микропроцессоры;
· сигнальные микропроцессоры.
По внутренней структуре существует два основных принципа построения микропроцессоров:
· Гарвардская архитектура;
· Архитектура Фон-Неймана.
По системе команд микропроцессоры отличаются огромным разнообразием, зависящим от фирмы-производителя. Тем не менее можно определить две крайние политики построения микропроцессоров:
Аккумуляторные микропроцессоры
Микропроцессоры с регистрами общего назначения
1.3 Состав и структура микропроцессорных системы управления двигателем
МПСУ двигателем (Рисунок 1) состоит из объекта управления — двигателя — и микроконтроллера с входящими в него микропроцессором, датчико- вой аппаратурой и исполнительными устройствами.
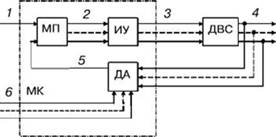
Рисунок 1 – Функциональная схема МПСУ:
ДВС — двигатель, объект управления; МК — микроконтроллер; МП — микропроцессор; ДА — датчиковая аппаратура; ИУ — исполнительные устройства; 1 — информация о положении педали управления; 2 — управляющие воздействия МП; 3 — управляющие воздействия МК; 4 — управляемые параметры; 5 — информация от датчиков; 6 — контролируемые возмущающие воздействия.
Основу МПСУ составляет микропроцессор, который получает информацию от датчиков 5 о состоянии двигателя, характеризуемых комплексом управляемых параметров 4, и об условиях его работы, характеризуемых комплексом контролируемых возмущающих воздействий 6. (Вредное влияние неконтролируемых возмущающих воздействий устраняется или хотя бы уменьшается микроконтроллером без информации об их значениях.) Задание микроконтроллеру (заданный режим работы двигателя) выражается информацией 1 о положении педали управления.
На основании введенной в микропроцессор информации формируется комплекс управляющих воздействий 2 (сигналов в виде кодов).
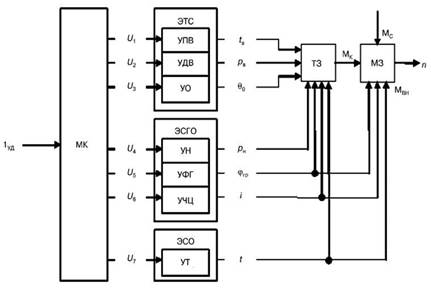
Рисунок 2 – Упрощенная функциональная схема МПСУ двигателем:
1УД — положение педали управления; С/!_7 — управляющие воздействия; ЭТС, ЭСГО, ЭСО — электронные системы: топливная, газообмена и охлаждения; УПВ, УДВ, УО — каналы управления продолжительностью впрыскивания топлива, давлением впрыскивания и опережением впрыскивания топлива / зажигания; УН, УФГ, УЧЦ — каналы управления наддувом, фазами газораспределения и числом работающих цилиндров; УТ — канал управления температурами в системах двигателя; ТЗ — тепловое звено; М3 — механическое звено; Мк — крутящий момент; Мс, Мвн — внешний и внутренний моменты сопротивления; п — частота вращения вала двигателя; 4, — длительность впрыскивания топлива; рв — давление впрыскивания топлива; 0О — опережение впрыскивания топлива; р„ — давление наддува; <ргр — фазы газораспределения; 4 — число работающих цилиндров; 4 — температура в системе охлаждения двигателя.
Исполнительные устройства содержат силовую электронику и исполнительные механизмы, осуществляющие комплекс управляющих воздействий 3 микроконтроллера на двигатель, т. е. в виде воздействий физической природы и уровней, необходимых для восприятия двигателем и его системами. В итоге они создают реальные параметры топливоподачи, воздушного заряда и др., непосредственно управляющие рабочим процессом в цилиндрах двигателя, а также влияют на системы смазки, охлаждения и прочие системы.
Поскольку такие параметры и воздействия, формируемые исполнительными устройствами, пропорциональны соответствующим управляющим воздействиям микропроцессора и отличаются от них только физической природой, целесообразно в общем случае говорить о комплексе управляющих воздействий микроконтроллера.
Собственно датчики и исполнительные механизмы действуют непосредственно в системах двигателей. Но в структурах систем управления удобнее относить их к микроконтроллеру, а не к двигателю — объекту управления.
Для более полного представления о функциональных связях в МПСУ на рис. 6.3 приведена одна из возможных схем, где представлены три электронные (электронно-управляемые) системы и только один управляемый параметр — частота вращения вала двигателя, который рассматривается как выходной сигнал механического звена двигателя, преобразующего разность крутящего момента и моментов сопротивления, с учетом момента инерции, в изменение частоты вращения вала.
В механическое звено входят все движущиеся детали двигателя и приводимого им агрегата (нагрузки). В момент сопротивления кроме внешней нагрузки входит и внутренняя, включая трение в движущихся деталях вследствие изменения температуры масла, числа работающих цилиндров и др.
Как это показано на схеме, крутящий момент создается тепловым звеном двигателя. В действительности выходным воздействием теплового звена являются силы, создаваемые на поршнях от давления газов в цилиндрах. Но преобразование сил на поршнях в крутящий момент происходит мгновенно, поэтому без ущерба достоверности можно считать выходным воздействием теплового звена крутящий момент.
Входные управляющие воздействия на тепловое звено создаются электронными (электронно-управляемыми) системами.
Управляющие воздействия, вырабатываются микроконтроллером. В рассматриваемой схеме указан только один входной сигнал 1уд микроконтроллера, несущий информацию о положении педали управления, которое устанавливается водителем. Эта информация представляет собой общее задание системе управления.
Основные задачи, которые стоят при проектировании микроконтроллера, — это выбор согласованных решений по структуре и параметрам отдельных составных элементов, их взаимных связей, разработка математического обеспечения, подбор датчиков и исполнительных устройств.
Структурная схема обобщенного микроконтроллера показана на рисунке 3.
Основу микроконтроллера составляет микропроцессор с устройствами ввода и вывода (УВВ), который получает информацию от датчиковой аппаратуры через интерфейс ввода и управляет двигателем через интерфейс вывода. Кроме того, микропроцессор осуществляет диагностирование двигателя и самой МПСУ.
Микропроцессор имеет три типа памяти.
1. ОЗУ, необходимое для хранения текущей информации и обеспечения работы системы управления. Находящаяся в нем информация теряется при отключении питания (аккумуляторной батареи).
2. ПЗУ, в котором находятся программы, обеспечивающие управление и конкретные значения калибровок (калибровки — конкретные численные значения параметров программ) данной системы. Эти данные не могут быть изменены без замены ПЗУ или его перепрограммирования на специальных установках.
3. ППЗУ используется для временного хранения дополнительной информации, необходимой для работы системы. Информация в нем является энергонезависимой и может сохраняться при отключении питания микроконтроллера.
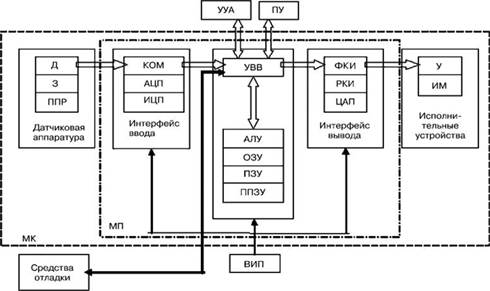
Рисунок 3 – Схема обобщенного микроконтроллера:
УУА — устройство управления автомобиля; ПУ — пульт управления; ВИП — вторичные источники питания. Состав МК: МП — микропроцессор. Датчиковая аппаратура: Д — датчики; 3 — задатчики; ППР — первичные измерительные преобразователи. Исполнительные устройства: У — усилители; ИМ — исполнительные механизмы. Состав МП: УВВ — устройство ввода-вывода; АЛУ — арифметическо-логическое устройство; ОЗУ — оперативное запоминающее устройство; ПЗУ — постоянное запоминающее устройство; ППЗУ — перепрограммируемое запоминающее устройство. Интерфейс ввода: КОМ — коммутатор; АЦП — аналого-цифровой преобразователь; ИЦП — импульсно-цифровой преобразователь. Интерфейс вывода: ФКИ — формирователь командных импульсов; РКИ — распределитель командных импульсов; ЦАП — цифроаналоговый преобразователь.
Микроконтроллер имеет связи как с УУА, так и с ПУ, на которых работает водитель (или наладчик системы в процессе отладки МПСУ, для чего предусмотрено подключение средств отладки).
Главный задатчик — датчик, установленный непосредственно на педали и фиксирующий ее положение. Другие задатчики конструктивно могут быть включены в пульт управления.
Датчики располагаются в разных системах двигателя. В системы встраиваются и исполнительные механизмы, а усилители иногда располагаются вблизи этих механизмов.
Остальные элементы микроконтроллера и вторичные источники питания ВИП обычно заключены в так называемый электронный блок управления — ЭБУ или ECU (Electronic Control Unit). Практически ЭБУ — основной конструктивный блок микроконтроллера, вне которого находятся только датчики и исполнительные устройства. Поэтому термин «электронный блок управления» обычно используется как синоним электронного управляющего устройства, но более правильно считать ЭБУ составной частью микроконтроллера.
ВИП, исполнительные механизмы или их усилители питаются от первичного источника — аккумуляторной батареи.
Цифровой микропроцессор не может непосредственно обрабатывать аналоговые сигналы, поэтому в интерфейсе ввода предусматривается аналого- цифровой преобразователь.
В состав некоторых ППР могут входить АЦП и ИЦП, образуя с соответствующими датчиками «интеллектуальные датчики».
Микропроцессор управляет работой микроконтроллера с использованием ряда программ-алгоритмов, хранящихся в ПЗУ.
|
из
5.00
|
Обсуждение в статье: Микропроцессорные системы управления двигателем (МСУД) с искровым зажиганием: назначение, классификация, структура систем и основы функционирования |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы