 |
Главная |


Расчет контактных напряжений.
|
из
5.00
|
При выборе захватного устройства (ЗУ) робота учитываем требования надежности захватывания и удержания объекта, стабильности базирования, недопустимость повреждения детали. Исходя этих требований и параметров заданной детали, определяем, что необходимо центрирующее или базирующее механическое ЗУ командного типа. Выбираем клещевое управляемое широкодиапазонное центрирующее ЗУ с реечным передаточным механизмом. ЗУ имеет одну пару поворотных губок (в виде призм), т.к. ЗУ с двумя парами губок может повредить отшлифованные поверхности детали, за которые в этом случае будет осуществляться захват.
ЗУ изображено на первом листе графической части курсовой работы. Данный захват имеет одну пару установленных на осях 2, губок 1, зажим и разжим которых осуществляется за счет осевого движения тяги 4 с жестко связанной с ней зубчатой рейкой 3. Место соединения тяги 4 с гнездом, выполненном во втулке 5 привода зажима и разжима схвата, а также байонетное соединение 8 хвостовика 6 с головкой шпинделя 7 кисти руки, накидной рычаг 9 с резьбой и гайка 10 унифицированы.
Выполним расчет для выбранного захватного устройства.
Определим силы, действующие в местах контакта заготовки и губок.


а) б)
Рассчитаем силу зажима.
 ,
,
где g = 9,81 м/с2 - ускорение свободного падения;
P = mg = 0,51 × 9,81 = 5 Н;
a, b - размеры захвата, м;
a1 - расстояние от края зажимных губок до центра тяжести заготовки (детали), м;
b1 - ширина зева захвата, м;
W - ускорение, возникающее при движении захвата, м/с2;
k=1,7 - коэффициент запаса;
d - диаметр заготовки, м.
 Н.
Н.
Определим силы, действующие в местах контакта заготовки и зажимных губок.
 ,
,
где a = 70° - угол призматического углубления губок;
k=1,7 - коэффициент запаса.
 кг.
кг.
Рассчитаем напряжение в месте захвата детали и захватного устройства:
 ,
,
где Ez, Eg - модуль упругости материала заготовки, Ez = Eg = =2,1×106;
lz - толщина рычага захвата, мм;
dg - диаметр детали, мм.
 Па.
Па.
Сравниваем полученное значение s с [sд] = 510 Па: [sд] > s, следовательно конструкция захвата выбрана правильно и позволяет захватить деталь не повреждая ее поверхности.
Схемы базирования.
На рис. 1 представлена схема базирования валика на шлифовальном станке в центрах, где 1, 2, 3, 4 - скрытая двойная технологическая база, 5 - опорная технологическая база. Т.к. технологическая и измерительные базы совпадают погрешность базирования равна нулю.
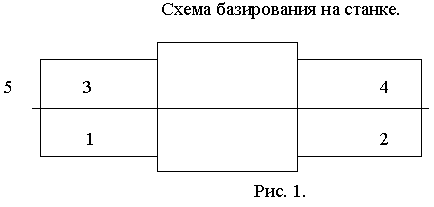
Схема базирования валика по наружной цилиндрической поверхности в захвате робота (клещевом) изображена на рис. 2, где 1, 2, 3, 4 - скрытая двойная направляющая технологическая база, 5- опорная технологическая база, 6 - скрытая опорная технологическая база.

Базирование валика на загрузочном устройстве осуществляется по наружной цилиндрической поверхности и показано на рис. 3, где 1, 2, 3 - установочная технологическая база, 4 - опорная технологическая база.

Схема компоновки РТК.
Учитывая количество и взаимосвязь основного и вспомогательного оборудования разрабатываем компоновку однопозиционного РТК, состоящего из шлифовального станка 2, обслуживаемого двуручным ПР 1 с модулем сдвига, бункерного ЗУ, накопителя 4, системы управления ПР 5 (см. первый лист графической части курсовой работы).
Краткие технические характеристики РТК.
Таблица 2.
| Оборудование | Параметр |
| Круглошли-фовальный 3М151Ф2 | Наибольшие размеры устанавливаемой заготовки: диаметр, мм 200 длина, мм 700 Наибольший диаметр наружного шлифования, мм 20-180 Наибольшая длина шлифования, мм 650 Частота вращения , об/мин, шпинделя заготовки с бесступенчатым регулированием 50-500 Частота вращения шпинделя шлифовального круга, об/мин 1590 Скорость врезной подачи шлифовальной бабки, мм/мин 0,02-1,2 Дискретность программируемого перемещения (цифровой индикации) шлифовальной бабки, мм 0,001 (0,1 стола) Мощность электродвигателя привода главного движения, кВт 15,2 Масса (с приставным оборудованием), кг 6500 |
| Робот Циклон-5.02 | Грузоподъемность суммарная/ на одну руку, кг 10/5 Число степеней подвижности (без захватного устройства) 6 Число рук/захватных устройств на руку 2/1 Тип привода пневматический Управление цикловое Число программируемых координат 3 Погрешность позиционирования, мм ±0,1 Масса, кг 780 |
| Накопитель (НУ) | Число фиксированных положений, шт. 1 Число сменных палет, шт. 8 Число деталей в палете, шт. 10 |
| Загрузочное устройство (ЗУ) | Число фиксированных положений, шт. 1 Число лотков, шт. 10 Число деталей, шт. 558 Время смены позиции, с 3 |
| Система управления | Скорость обмена информации, байт/с 200 Разрядность каналов связи, бит 8 Объем памяти для управляющей программы, Кбайт 16 Максимальное количество управляемого оборудования, шт 5 |
|
из
5.00
|
Обсуждение в статье: Расчет контактных напряжений. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы