 |
Главная |


Программа характеризации оси В.
|
из
5.00
|
При установке повортоного стола на станок необходимо привязать его к СЧПУ. Эта привязка включает в себя два этапа:
1. Аппаратное соединение всех исполнительных органов и контролируемых элементов стола с СЧПУ. Определение алгоритмов выполнения функций управления включает в себя задание взаимодействия выходных каналов между собой и входных каналов с выходными.
2. Программная идентификация всех исполнительных органов и контролируемых элементов. Формализация алгоритмов взаимодействия их между собой.
Программная привязка СЧПУ к поворотному столу осуществляется специальным программным обеспечением характеризации объекта управления. Оно представляет собой файловую систему содержащую множество отдельных файлов характеризации каждого из исполнительных и контролируемых элементов. Характеризация дополнительных координат “В” и “A” осуществляется с помощью файлов «AX4_TEA.INI» и «AX5_TEA.INI» соответственно. Редактировать эти файлы можно как непосредственно из интерфейса ЧПУ, так и на ПК. Алгоритм характеризации координат из интерфейса ЧПУ представлен в графической части.
Файл характеризации представляет собой набор адресов и параметров присваиваемых каждому адресу. Файлы характеризации для оси “В” содержит следующие параметры:
N30100 $MA_CTRLOUT_SEGMENT_NR[0,В1]=1
Определяется тип привода для координаты, в данном случае цифра 1 обозначает сервопривод.
N30110 $MA_CTRLOUT_MODULE_NR[0,В1]=4
Определяет порядковый номер привода по какому он идентифицируется в СЧПУ.
N30132 $MA_IS_COORDINATE_BY[0,В1]=1
Ось является координатной?
N30132 $MA_IS_ROTARY_BY[0,В1]=1
Ось является вращательной?
N30132 $MA_IS_VIRTUAL_BY[0,B1]=0
Ось является виртуальной?
N30132 $MA_IS_DIAMETRICAL_BY[0,B1]=0
Ось является диаметральной?
N30200 $MA_NUM_ENCS[B1]=2
Число датчиков, установленных на координате.
N30242 $MA_ENC_IS_INDEPENDENT[0,B1]=1
N30242 $MA_ENC_IS_INDEPENDENT[1,B1]=0
Является ли датчик независимым?
N30250 $MA_ACT_POS_ABS[0,B1]=0
N30250 $MA_ACT_POS_ABS[1,B1]=0
Внутренняя позиция датчика
N31020 $MA_ENC_RESOL[0,B1]=36000
N31020 $MA_ENC_RESOL[1,B1]=3600
Деления датчика на оборот
N31044 $MA_ENC_IS_DIRECT2[0,B1]=0
N31044 $MA_ENC_IS_DIRECT2[1,B1]=0
Датчик установлен через редуктор ?
N31200 $MA_SCALING_FACTOR_G70_G71[B1]=25.4
Коэффициент для перерасчёта значения при активных G 70/ G 71
N32000 $MA_MAX_AX_VELO[B1]=5400
Максимальная скорость оси, град/мин
N32000 $MA_MIN_AX_VELO[B1]=1
Минимальная скорость оси, град/мин
N32010 $MA_JOG_VELO_RAPID[B1]=5400
Скорость традиционного быстрого хода, град/мин
N32300 $MA_MAX_AX_ACCEL[B1]=360
Ускорение оси, град/с
N32260 $MA_RATED_VELO[0,B1]=3000
Номинальное число оборотов двигателя, об/мин
N32200 $MA_POSCTRL_GAIN[0,B1]=3
Коэффициент кольцевого усиления
N32310 $MA_MAX_ACCEL_OVL_FACTOR[B1]=1.2
Коэффициент перегрузки для осевых скачков скорости
N32452 $MA_BACKLASH_FACTOR[0,B1]=1
Поправочный коэффициент для обратного люфта
N32490 $MA_FRICT_COMP_MODE[0,B1]=1
Вид компенсации трения
N32500 $MA_FRICT_COMP_ENABLE[B1]=0
Компенсация трения активна
N32800 $MA_EQUIV_CURRCTRL_TIME[0,B 1]=0.0005
Постоянная времени контура управления током
N32810 $MA_EQUIV_SPEEDCTRL_TIME[0,B1]=0.004
Постоянная времени контура управления числом оборотов
N32920 $MA_AC_FILTER_TIME[B1]=0
Постоянная времени фильтра сглаживания для адаптивного управления
N34020 $MA_REFP_VELO_SEARCH_CAM[B1]=720
Скорость перемещен к референтной точке, град/мин
Алгоритм интерполяции
Рассмотрим линейную интерполяцию по двум координатам (рис. 5), где показано ступенчатая отработка движения в функции F,учитывающей знак отклонения от заданной прямой.

Рисунок 5 – Линейная интерполяция по методу оценочной функции
Расчетное уравнение прямой, проходящей через начало координат
 ,
,
где XK , YK - конечные значения координат на участке траектории.
В качестве оценочной функции в любой точке i можно принять разность текущего и расчетного значений координаты

Учитывая, что при формировании закона управления движением имеет значение только знак оценочной функции, последнее выражение может быть представлено в виде

Пусть выполняется шаг по координате Х,тогда оценочная функция будет

Если выполнить шаг по координате Y , то оценочная функция:
 .
.
Управлением движением по данным уравнениям происходит по следующим правилам. Если в данный момент времени значение оценочной функции положительно F( X , Y ) > 0, то делается шаг по координате X, если отрицательно F( X , Y ) <0, то выполняется шаг по координате Y.
Алгоритм может быть усовершенствован за счет выдачи приращения на каждом кванте времени по координате, имеющей наибольшее значение. Обозначим через X наибольшую координату, тогда при положительном значении оценочной функции необходимо выдавать приращение только по координате X, а при отрицательном и равном нулю значениям - по обеим координатам X и Y. В этом случае новое значение оценочной функции можно рассчитать по формуле:
 .
.
Достоинство этого алгоритма заключается в том, что при движении вдоль прямой под углом 45° к координатным осям максимальная скорость возрастает за счет одновременного движения по координатам X и Y .
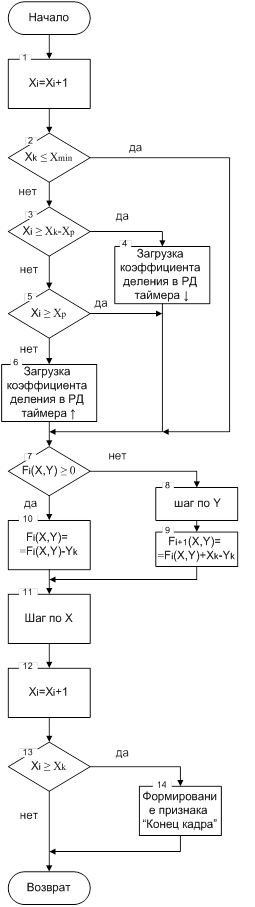
Рисунок 6 – Блок-схема алгоритма линейной интерполяции
Заключение
В данном курсовом проекте был реализован общий подход к задачам проектирования СЧПУ металлорежущих станков, их разработки и эксплуатации.
Был произведен анализ кинематики станка и обоснован тип и число управляемых и контролируемых параметров, разработаны электрические принципиальные схемы подключения УЧПУ к станку и электроавтоматики станка, а также алгоритм позиционирования. При выполнении этого проекта были использованы знания и навыки, полученные при изучении дисциплин «Автоматизированный электропривод станков и промышленных роботов», «Электроника и микропроцессорная техника систем управления», «Теория автоматического управления», «Управление процессами и объектами в машиностроении».
|
из
5.00
|
Обсуждение в статье: Программа характеризации оси В. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы