 |
Главная |


Структуры электроприводов.
|
из
5.00
|
Назначение и классификация электроприводов
Электропривод – это электромеханическая система, состоящая из взаимодействующих электрических, электромеханических и механических преобразователей, а также управляющих информационных устройств, в предназначенных для приведения в движение исполнительных органов рабочей машины (ИО РМ) и управления этим движением для осуществления технологического процесса.
рис 1. Структурная схема электропривода
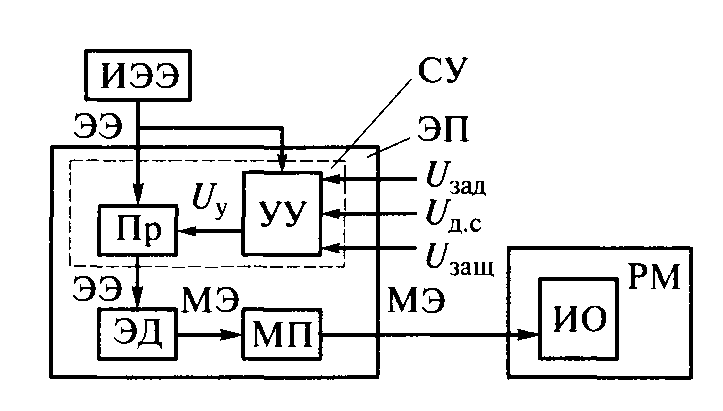
ЭД – это электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую и наоборот.
Назначение электропривода Основное назначение электропривода – преобразовывать электрическую энергию в механическую и управлять этим процессом. В связи с этим энергетические показатели и характеристики электропривода имеют первостепенное значение, тем более, что электропривод потребляет около 60-65% электроэнергии, производимой в стране.
Структуры электроприводов.
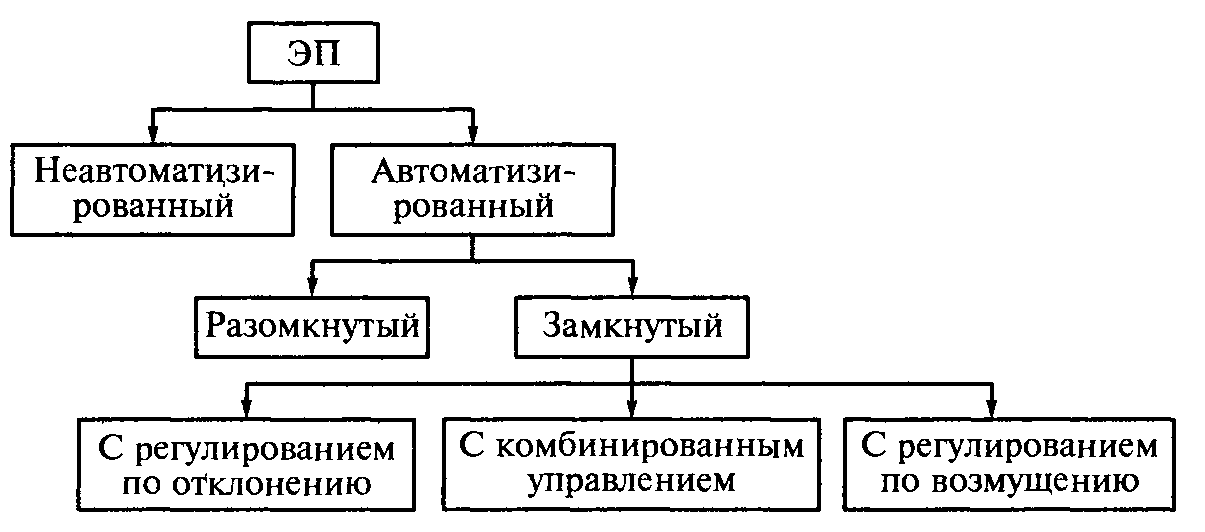
В зависимости от выполняемых функций, вида и числа регулируемых переменных и степени числа регулируемых переменных и степени автоматизации технологических процессов электроприводы можно разделить на два основные группы: неавтоматические и автоматические.
Неавтоматический – это ЭП, управление которым выполняет оператор или имеется дистанционное управление.
В автоматическом электроприводе большинство операции выполняется системой управления. На оператора в этом случае возлагаются функции по включению и отключению электропривода и общему контролю за его работой.
Работа замкнутого электропривода характеризуется тем, что все внешние возмещения частично или полностью устраняются, и не влияют на регулируемую величину. Замкнутый ЭП может быть построен по принципам отклонения с использованием обратных связей или компенсации внешних возмущений.
В разомкнутом электроприводе все внешние возмущения влияют на выходную переменную электропривода. Разомкнутые электроприводы обычно применяются для пуска торможения или реверса двигателя, а также для регулирования переменных электропривода с невысоким качеством.
Основным признаком замкнутого электропривода является наличие обратных связей по которым на вход электропривода подаётся вместе с задающим сигналом, сигнал с регулируемой выходной величиной. В результате этого, управление электропривода осуществляется суммарным сигналом ошибки, который автоматически изменяется в нужную сторону при колебаниях нагрузки и обеспечивает с помощью системы управления поддержание регулируемой величины на заданном уровне. Так как в замкнутых электроприводах устраняется или компенсируется всё внешнее возмущение, то существуют следующие схемы замкнутых электроприводов:
1) схема с компенсацией возмущения;
2) схема с обратной связью;
3) схема с общим усилителем;
4) схема с наблюдающим устройством;
5) схема с подчинённым регулированием координат.
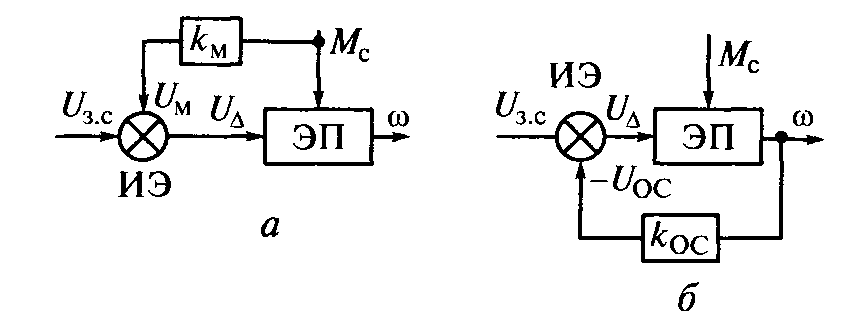
а – с компенсацией возмущения б – с обратной связью
Принцип работы замкнутого электропривода с компенсацией возмущения заключается в следующем: основным признаком такого электропривода является наличие цепи. по которой на ход управляющего устройства электропривода вместе с задающим сигналом скорости подаётся сигнал пропорциональный моменту нагрузки: UM = KM * MC
В результате этого с управляемого сигнала на ЭП подаётся суммарный сигнал ошибки ΔU, который автоматически изменяет нужную сторону скорость электропривода при любых колебаниях момента нагрузки. Поддержание скорости электропривода на заданном уровне обеспечивается с помощью системы управления.
Однако, такие схемы применяются редко, так как нет простых и надёжных датчиков момента нагрузки. В связи с этим большинство замкнутых электроприводов используют принцип обратных связей. Такой ЭП характеризуется наличием цепи обратной связи, соединяющий выход электропривода с его входом.
По цепи обратной связи передается информация о текущем состоянии скорости
UOC = KOC * ω
на вход электропривода, где он сравнивается или вычитается из задающего сигнала. Управление осуществляется сигналом отклонения или сигналом рассогласования.
Δ U = U ЗС - UOC
Этот сигнал при отличии скорости от заданного уровня автоматически изменятся необходимым образом и устраняется с помощью системы управления. Если требуется регулирование других переменных электропривода, то используются обратные связи по этим переменным. При необходимости получения высоких показателей регулирования используется сочетание принципов компенсации и обратной связи.
Все виды переменных и применяемых обратных связей в электроприводе бывают положительные и отрицательные, гибкие жёсткие, линейны и нелинейные.
Положительной называется такая обратная связь, сигнал которой складывается с задающим сигналом.
Отрицательной обратной связью называется такая обратная связь, при которой сигнал направлен встречно задающему сигналу.
Жёсткая обратная связь – обратная связь, параметры которой не меняются как в установившемся так и в переходном режимах.
Сигнал гибкой обратной связи вырабатывается только в переходных режимах и служит для обеспечения требуемого качества переходных режимов.
Линейная обратная связь характеризуется пропорциональной зависимостью между регулируемой координатой и сигналом обратной связи, в то время как при реализации нелинейной связи эта зависимость не является пропорциональной. В зависимости от вида регулируемых координат могут использоваться все обратные связи по скорости, положению, току, напряжению, магнитному потоку и ЭДС.
Для управления движением ИО РМ необходимо регулировать несколько переменных электропривода, и тогда замкнутые электроприводы выполняются по схеме с общим усилителем:
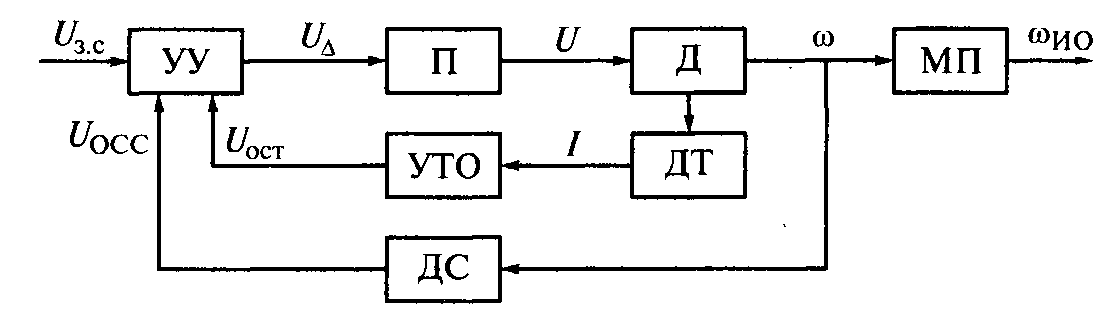
Схема с общим усилителем
Д – двигатель ЭП
УУ – управляющее устройство
П – преобразователь электроэнергии
МП – механическая передача
ДТ – датчик тока
ДС – датчик скорости
УТО – устройство тока ограничения (токовая отсечка)
Данная схема обеспечивает работу двигателя при ограничении тока и скорости по следующим механическим характеристикам.

3, 4 – соответственно вертикальные и горизонтальные усечки характеристики в замкнутой системе.
В интервале скорости от 0 до ω1 обеспечивается ограничение тока и момента за счёт действия обратной связи по току характеристика имеет вид близкой к вертикальному. При ω>ω1 за счёт устройства токоограничения прекращает действие датчик тока и начинает своё влияние датчик скорости, характеристика двигателя становится жёсткой и обеспечивает регулирование скорости.
Совокупностью обратных связей, число которых может быть больше чем два в схеме с общим усилителем образуется модельный регулятор, а переменные этого регулятора называются переменными состояния электропривода.
Основной задачей модельного регулятора является обеспечение заданного качества динамических процессов в электроприводе – это быстродействие, устойчивость степень затухания переходных процессов. Показатели качества достигаются выбором видов и соответствующим расчётом коэффициентов в обратной связи по переменным электропривода.
3.Основными элементами электропривода являются: электродвигатель, аппаратура управления и защиты, промежуточные передачи, соединяющие электродвигатель с рабочей машиной.
В некоторых приводах промежуточная передача отсутствует (привод насосов, вентиляторов и др.). С целью повышения гибкости управления и улучшения характеристик питание электродвигателя иногда осуществляется от управляемого выпрямителя, генератора пли преобразователя частоты, которые также являются элементами электропривода. В большинстве случаев привод получает электроэнергию от трехфазной сети переменного тока частотой 50 Гц, напряжением от 380 до 10 000 В.
Передаточное устройство предназначено для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласования вида и скорости их движения. В качестве исполнительного органа могут служить валки прокатного стана, барабан кранового механизма, механизм перемещения электрода и т. п. В качестве передаточного устройства используют редукторы, планетарные и реечная передачи, муфты и т. п.
|
из
5.00
|
Обсуждение в статье: Структуры электроприводов. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы