 |
Главная |


Станция для подзарядки
|
из
5.00
|
Проектная инициатива
(startup)
Робот-Экскурсовод
название
Красноярск 2019
Актуальность. 3
Основная часть. 4
Аналоги.. 4
Макет робота.. 5
Дизайн. 5
Платформа. 5
Туловище. 5
Руки. 6
Голова. 6
Система навигации в пространстве. 6
Станция для подзарядки. 6
Экономика. 7
Обслуживание. 7
Целевая группа. 7
Затраты на макет робота. 7
Риски. 8
Бизнес-модель. 9
Выводы.. 9
Список используемых сайтов. 9
Актуальность
Работа экскурсовода трудна: им необходимо запоминать и понимать большие объемы информации, с которой они работают. У экскурсоводов длинный рабочий день (в некоторых случаях им необходимо проводить не только дневные экскурсии, но и вечерние или ночные мероприятия), не все люди способны справится с подобной нагрузкой. Зарплата экскурсоводов достаточно мала(см. приложение 3) (примерно 25000 руб.), что делает эту профессию не самой востребованной. Немногие из них способны вести экскурсии на других языках, помимо родного или английского. Робот же сможет вести экскурсии на различных популярных языках, повышая уровень удовлетворения от экскурсии иностранных туристов.
Экскурсии в научных центрах зачастую проводят их же работники, безусловно, они обладают большими знаниями в области предмета, о котором повествуют, но они не всегда способны привлечь внимание публики и корректно выразить суть повествования. Также они не способны вести экскурсии регулярно, так как это не является их основной работой, это делает информацию недоступной для больших масс людей.
Так же робот сможет привлекать аудиторию, так как в настоящее время современные технологии интересуют многих людей.
Цель
· Разработать и создать автономного робота-экскурсовода, способного вести экскурсии на разных языках (включая русский, английский, немецкий, китайский и др.) и отвечать на задаваемые вопросы, а также автоматически подзаряжаться.
• Разработать и создать станцию для подзарядки робота.
• Разработать интуитивно понятный интерфейс взаимодействия с роботом.
• Разработать приложение для оператора робота, позволяющее дистанционно наблюдать за роботом и отвечать на вопросы.
Задачи
1. Изучить материал, связанный с нашим проектом.
a. Изучить аналоги нашего робота.
b. Выявить условия, при которых робот выполняет поставленную задачу.
c. Изучить материал по работе с используемым оборудованием.
2. Разработка:
a. Концепции.
b. Структуры.
c. Механизмов.
3. Создать реальный макет робота.
a. Разработать дизайн робота.
b. Создать и запрограммировать платформу робота.
c. Создать тело робота.
d. Создать и запрограммировать руки робота.
e. Создать и запрограммировать электронику головы.
f. Создать станцию для подзарядки.
4. Подсчитать экономическую составляющую проекта (средства, вложенные в создание макета; стоимость итогового продукта, выпущенного на рынок).
Основная часть
Аналоги
При поиске аналогов мы пользовались такими поисковыми системами, как Яндекс, Google и Yahoo! для более глубокого поиска. Среди аналогов мы нашли нескольких роботов-экскурсоводов, каждый из которых обладает своей уникальностью, оригинальностью, достоинствами и недостатками.
 Основным аналогом является робот Алантим от пермского производителя Promobot, созданный в 2015 году.
Основным аналогом является робот Алантим от пермского производителя Promobot, созданный в 2015 году.
| Рис. 1. Робот Алантим |
| Алантим | Наш робот |
| Голова робота, вращающаяся в двух плоскостях (влево-вправо, вверх-вниз) с системами распознавания лиц и звука | Голова робота не вращается, имеются светодиодные матрицы, изображающие глаза для большей выразительности |
| Камера — разрешение 1 280×720, 30 кадров в секунду, печать снимков | Камера – разрешение 640×320 |
| Микрофон — всенаправленный | - |
| Интерактивный LCD-дисплей с диагональю 18,5 дюймов для отображения информации с сенсорным управлением | Интерактивный TFT-дисплей с диагональю 11 дюймов для отображения информации с сенсорным управлением |
| 2 руки-манипулятора, вращение в 1 степени свободы | 2 руки, вращение в 2 степенях свободы (это позволяет придать больше экспрессии) |
| Платформа передвижения Привод – 2 колеса с подруливающим роликом | Платформа передвижения Привод – 2 мотора и 2 всенаправленных колеса |
| Система датчиков для преодоления препятствий во время движения | Система позиционирования, используя ZigBee |
| Динамик — 44 Вт для воспроизведения звука | Аудиосистема – 2 канала по 30 Вт для воспроизведения звука |
Среди других аналогов имеются роботы Promobot V3, R.BOT, KIKI.

| Рис. 2. Робот KIKI |
Макет робота
Дизайн
 Корпус робота покрыт полипропиленом или любым другим прочным пластиком. Прочность корпуса очень важна, так как робот должен быть устойчив к возможным механическим ударам и повреждениям. Также у полипропилена гладкая текстура, поэтому он более эстетичен, чем некоторые другие материалы.
Корпус робота покрыт полипропиленом или любым другим прочным пластиком. Прочность корпуса очень важна, так как робот должен быть устойчив к возможным механическим ударам и повреждениям. Также у полипропилена гладкая текстура, поэтому он более эстетичен, чем некоторые другие материалы.
Высота должна составлять примерно 1,5 м для большей схожести с человеком, ширина и толщина – примерно 35 см.
Корпус имеет гладкую форму, со сглаженными очертаниями, что придает эстетики.
| Рис. 3. Концепт-арт робота, выполненный в ПО paint. net |
Цветовая схема корпуса:
| Перламутрово-рубиновый | HEX 721422 | |
| Белый | HEX FFFFFF | |
| Серебряный | HEX С0С0С0 | |
| Темная орхидея | HEX 9932CC |
Платформа
 Платформа робота сделана на основе образовательного конструктора TETRIX и управляется контроллером Arduino Uno. За перемещения робота в пространстве отвечают моторы постоянного тока TETRIX (152 оборота в минуту и 2,26
Платформа робота сделана на основе образовательного конструктора TETRIX и управляется контроллером Arduino Uno. За перемещения робота в пространстве отвечают моторы постоянного тока TETRIX (152 оборота в минуту и 2,26  крутящего момента), под управление драйвера моторов L293D. Робот оснащен всенаправленными колесами, что увеличивает его маневренность. Позиционирование на поле осуществляется с помощью системы радиомодулей и оптических энкодеров. Ширина и длина платформы составляют по 28,7 см; высота – 12,6 см.
крутящего момента), под управление драйвера моторов L293D. Робот оснащен всенаправленными колесами, что увеличивает его маневренность. Позиционирование на поле осуществляется с помощью системы радиомодулей и оптических энкодеров. Ширина и длина платформы составляют по 28,7 см; высота – 12,6 см.
Рис. 4. Платформа робота
Туловище
На платформе робота зафиксировано «туловище», представляющее собой трубу из полипропилена. На туловище закреплен TFT-дисплей с диагональю 11.6 дюймов и сенсорным управлением. Дисплей по интерфейсам HDMI и USB подключен к Raspberry Pi Model 3B.
По бокам на высоте 1 м на туловище прикреплены с помощью винтов и специальных держателей руки. Между креплениями для рук имеется прямоугольное отверстие, облегчающее конструкцию, и облегчающее транспортировку робота.
Высота туловища составляет примерно 1,2 м.
Руки

 Каркас рук сделан из деталей конструктора TETRIX. Благодаря сервомоторам и моторам с редукторами каждая рука имеет 3 степени свободы.
Каркас рук сделан из деталей конструктора TETRIX. Благодаря сервомоторам и моторам с редукторами каждая рука имеет 3 степени свободы.
Руки на макете робота также управляются контроллером Arduino Uno.
Длина рук – 28,8 см.
Рис. 6. Рука
Рис. 5. Туловище сзадию
Голова
Каркас сделан из фанеры и медной проволоки и покрыт пластиком. На передней части установлены светодиодные матрицы, играющие роль «глаз». Светодиодные матрицы управляются контроллером Arduino Uno, используя сдвиговые регистры 74HRC595. Голова закреплена на туловище металлическими уголками и болтами.
В голове закреплены 2 динамика, с помощью которых создается стереозвук. Для его воспроизведения также используется аудио усилитель, а для его хранения – SD-карта объемом 32GB. Аудиосистему контролирует одноплатный компьютер Raspberry Pi. SD-карта также используется для хранения образа ОС Raspbian и видео, необходимых для экскурсий.
 Система навигации в пространстве
Система навигации в пространстве
Система навигации, используемая для передвижения робота в пространстве будет создана на основе радио-трансмиттеров NRF24L01, имеющих частоту передачи данных от 2,405 ГГц.
Станция для подзарядки
| Рис. 7. Макет головы |
Экономика
Обслуживание
Обслуживание робота дешевле, чем оплата труда экскурсовода. Средняя зарплата экскурсовода по стране 25000 рублей. Робот будет использовать около 240 ватт в час, при условии работы робота в течение 24 часов, 365 дней в году и при средней стоимости киловатта энергии в 3 рубля, на подзарядку робота будет потрачено около 7900 рублей в год (это округленное значение при КПД зарядочной станции в 75%). Затраты на обслуживание компонентов робота: обслуживание обойдется примерно в 14400 руб., данная сумма взята с запасом и ее хватит на замену всех батарей 2 раза.
Целевая группа
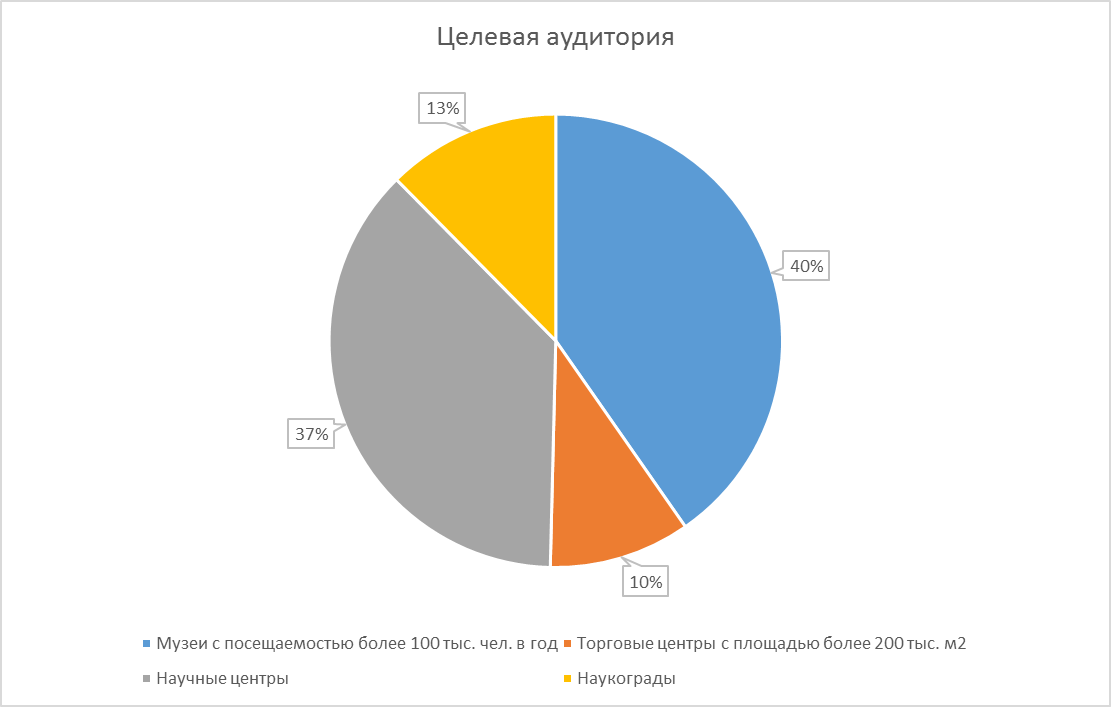
Данная диаграмма представляет потенциальных потребителей готового продукта, из расчета:
Количество музеев в России – 52
Количество значимых бизнес-центров в России – 13
Количество научных центров в России – 48
Количество наукоградов в России – 16
|
из
5.00
|
Обсуждение в статье: Станция для подзарядки |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы