 |
Главная |


Основные формы существования систем.
|
из
5.00
|
В целом, как мы уже отмечали, системы можно различать по тому, каким образом они связаны с источником энергии, т.е. открытые и закрытые системы. Вместе с тем, часто в качестве критерия используется сложность системы и слагающих её элементов. В общем, к детерминированным системам относятся автоматизированные системы, рабочие параметры которых соответствуют расчетным. А к недетерминированным системам, например, можно отнести системы “человек-машина”, в связи с участием в ней человека.
4.1. Автоматические системы.
Автоматические машины относят к классу кибернетических (управляемых) систем, в которых управленческие функции выполняются без участия человека.
Одной их характерных особенностей управляемой системы является способность изменять свое движение, переходить в различные состояния под влиянием управляющих воздействий. При этом подразумевается, что из некоторого множества движений можно выбрать предпочтительное в смысле реализации поставленной цели. Где нет выбора, там не может быть и управления.
Говоря о кибернетике как теории автоматики, выделяют ту её сторону, которая применима к практике, - проблему реализации цели методами управления при изменяющихся, в допустимых пределах, внешних и внутренних условиях функционирования системы.
В зависимости от класса объекта управления, кибернетика подразделяется на техническую, организационную, экономическую, биологическую и др. Именно техническая кибернетика или теория автоматического управления изучает системы, в которых функции управления выполняются исключительно техническими средствами, объединенными в так называемое управляющее устройство, в задачу которого входит реализация алгоритма (алгоритм – предписание, определяющее содержание и последовательность операций, переводящих исходные данные в искомый результат) управления, обеспечивающего выполнение требований, предъявляемых к объекту управления: технологическому процессу, промышленной установке.
Таким образом, в системе управления можно выделить два крупных блока - объект управления и управляющее устройство. При этом любая система управления использует два основных принципа: управление по возмущению и управление по отклонению. Рассмотрим эти принципы подробнее.
1. Управление по возмущению состоит в том, что для уменьшения нежелательного влияния возмущающих воздействий  на выходные управляемые переменные объекта
на выходные управляемые переменные объекта  осуществляют контроль этих возмущений и при их изменении изменяют управление
осуществляют контроль этих возмущений и при их изменении изменяют управление  таким образом, чтобы скомпенсировать влияние возмущений (см рис.1). При использовании данного принципа, контур управления разомкнут, и управляемая величина не влияет на работу управляющего устройства. Это означает, что характер управляющих воздействий зависит функционирования объекта лишь в той степени, в какой учтено влияние возмущения и управления
таким образом, чтобы скомпенсировать влияние возмущений (см рис.1). При использовании данного принципа, контур управления разомкнут, и управляемая величина не влияет на работу управляющего устройства. Это означает, что характер управляющих воздействий зависит функционирования объекта лишь в той степени, в какой учтено влияние возмущения и управления  на величину
на величину  . В связи с этим разомкнутая система, как правило, не может обеспечить желаемого поведения объекта с достаточной точностью.
. В связи с этим разомкнутая система, как правило, не может обеспечить желаемого поведения объекта с достаточной точностью.

Это является основным недостатком рассматриваемых систем. К их достоинствам следует отнести принципиальную возможность упреждающей компенсации влияния возмущения на выходные переменные объекта управления.
2. Управление по отклонению управляемых переменных от их предписанного значения  (см рис.2) требует наличия обратной связи (ОС), которая обеспечивает зависимость управления на входе объекта от управляемых переменных на его выходе. В данной системе контур управления благодаря наличию обратной связи замкнут.
(см рис.2) требует наличия обратной связи (ОС), которая обеспечивает зависимость управления на входе объекта от управляемых переменных на его выходе. В данной системе контур управления благодаря наличию обратной связи замкнут.
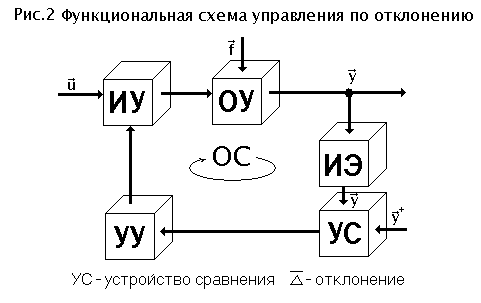
Отклонение  может быть вызвано любыми причинами (в том числе изменением задания ), и его наличие является командой для изменения до тех пор, пока величина
может быть вызвано любыми причинами (в том числе изменением задания ), и его наличие является командой для изменения до тех пор, пока величина  не снизится до допустимого значения. Таким образом, введение обратной связи принципиально предлагает наличие погрешности
не снизится до допустимого значения. Таким образом, введение обратной связи принципиально предлагает наличие погрешности  , что является недостатком системы. Кроме того, в системах с ОС в силу инерционности объекта информация о его состоянии запаздывает, что ухудшает динамические показатели работы системы, в частности увеличивает её склонность к колебаниям. Основное достоинство рассматриваемой системы - возможность успешного решения задачи управления, несмотря на некоторую неопределённость и неточность данных о характеристиках объекта управления и возмущающих воздействиях.
, что является недостатком системы. Кроме того, в системах с ОС в силу инерционности объекта информация о его состоянии запаздывает, что ухудшает динамические показатели работы системы, в частности увеличивает её склонность к колебаниям. Основное достоинство рассматриваемой системы - возможность успешного решения задачи управления, несмотря на некоторую неопределённость и неточность данных о характеристиках объекта управления и возмущающих воздействиях.
Для улучшения показателей качества работы системы целесообразно применять сочетание разомкнутой и замкнутой систем управления. В этом случае сильные возмущения в основном компенсируют по замкнутому контуру, а все неучтенные возмущения – замкнутой системой.
По способам функционирования управляемые системы подразделяются на два больших класса:
Неадаптивные, в которых структура и параметры систем, а также алгоритм действий остаются неизменными в процессе их функционирования и не зависят от изменения внешних и внутренних условий. К таким системам, прежде всего, относятся системы стабилизации (задающие воздействия =const); программного управления (здесь - заданная функция времени); следящие (здесь - случайная функция времени). Роль человека в таких системах обычно сводится к контрольным функциям.
Адаптивные, могущие осуществлять процесс адаптации, т.е. изменения свойств системы с целью достижения оптимального или, по крайней мере, удовлетворительного её функционирования в непрерывно изменяющихся условиях. Характерный признак адаптивных систем - отсутствие полной априорной информации об объекте управления, внешних возмущениях и граничных условиях. Это означает, что адаптивной системе присуща некоторая неопределенность. Функционирование системы направлено на раскрытие этой неопределенности, т.е. на нахождение такого её состояния, при котором удовлетворяется определённый критерий качества. Заметим, что включение человека в процесс управления, как правило, повышает адаптационные свойства системы.
Оптимальное функционирование адаптивной системы может рассчитываться на основании анализа информации о её состоянии. Такие системы называю аналитическими. Если же оптимальный режим работы определяется в результате поиска экстремума критерия качества, то системы называют поисковыми. В этом случае система как бы ставит серии опытов и извлекает из них данные, необходимые для улучшения своего поведения.
Среди адаптивных систем в зависимости от объёма контролируемых изменений различают следующие:
· экстремальные, в которых изменяются только управляющие воздействия;
· самонастраивающиеся, в которых изменяются управляющие воздействия и параметры системы;
· самоорганизующиеся, в которых кроме управляющих воздействий и параметров изменяется и структура системы;
· обучающиеся, в которых в добавление ко всему может изменяться алгоритм действия, а в случае самообучения - и критерии качества.
|
из
5.00
|
Обсуждение в статье: Основные формы существования систем. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы