 |
Главная |


Составление программы для имитационного моделирования, используя структурную схему нелинейной автоматической системы
|
из
5.00
|
Листинг программы в Matlab:
clc;
clear;
%Параметыр моделирвоания
dt=0.001;
time=0:dt:100;
%Параметры системы управления
% Пи-регулятор
%------
Kp=20.39;
Tp=10;
%-----
U0=4; %Температура задания
%-----
Upm=10; %ограничение с Пи регулятора
%-----
K0=0.4;
Uc=220;% действующее напряжение сети
C=100;
Rn=25; % сопротивление нагревателя
Tc=25; %температура окружающей среды
gamma=5;
%Параметры датчика тока
%-----
Kd=0.05;
Td=2;
%-----
%Инициализация
err=zeros(1,numel(time));
d_err=zeros(1,numel(time));
U=zeros(1,numel(time));
Up=zeros(1,numel(time));
alpha=zeros(1,numel(time));
Un=zeros(1,numel(time));
Pn=zeros(1,numel(time));
err1=zeros(1,numel(time));
T=zeros(1,numel(time));
Ud=zeros(1,numel(time));
%Начальные условия
%--------------------------
err(1)=U0;
d_err(1)=0;
U(1)=Kp*err(1);
if (U(1)>=10)
Up(1)=10;
end;
alpha(1)=pi/(1+K0*Up(1));
Un(1)=(((pi-alpha(1)+(sin(2*alpha(1))/2))/pi)^0.5)*Uc;
Pn(1)=(Un(1))^2/Rn;
err1(1)=Pn(1)-((T(1)-Tc)*gamma);
T(1)=0; %начальная температура объекта
Ud(1)=0;
%-------------------------
for k=2:1:numel(time)
err(k)=U0-Ud(k-1);
d_err(k)=(err(k)-err(k-1))/dt;
U(k)=U(k-1)+((dt/Tp)*(Kp*Tp*d_err(k-1)+Kp*err(k-1)));
if (U(1)>10)
Up(1)=10;
else
Up(1)=U(1);
end;
if (U(k)<0)
Up(k)=0;
else
Up(k)=U(k);
end;
alpha(k)=pi/(1+K0*Up(k));
Un(k)=(((pi-alpha(k)+(sin(2*alpha(k))/2))/pi)^0.5)*Uc;
Pn(k)=(Un(k))^2/Rn;
err1(k)=Pn(k)-((T(k-1)-Tc)*gamma);
T(k)=T(k-1)+(dt*err1(k-1)/C);
Ud(k)= Ud(k-1)+((Kd*T(k-1)-Ud(k-1))*(dt/Td));
end;
plot(time,T);
grid on;
figure;
plot(time,err);
grid on;
Результаты выполнения программы:
Переходный процесс относительно ошибки

Переходный процесс относительно выходной переменной

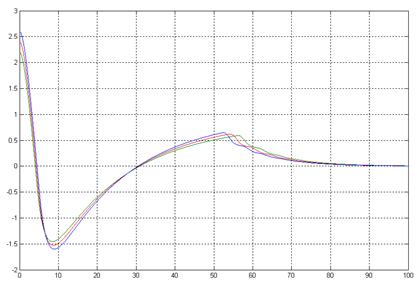
Используя составленную программу, определить переходные процессы в системе для выходной переменной и ошибки при изменении задающего и возмущающего воздействий для различных рабочих точек
Uз=4В
Переходные процессы для выходной переменной (+10%,+20%,+30%)

Переходные процессы для ошибки (+10%,+20%,+30%)

Переходные процессы для выходной переменной (-10%,-20%,-30%)

Переходные процессы для ошибки (-10%,-20%,-30%)

Uз=2В
Переходные процессы для выходной переменной (+10%,+20%,+30%)

Переходные процессы для ошибки (+10%,+20%,+30%)
Переходные процессы для выходной переменной (-10%,-20%,-30%)

Переходные процессы для ошибки (-10%,-20%,-30%)

Статические характеристики системы
Зависимости выходной переменной от возмущающего воздействия при трех значениях задающего воздействия:
Uз=2В Uз=4В


Uз=6В

Сравнение результатов моделирования с помощью составленной программы и с помощью типовых программных средств
При сравнении переходных процессов по ошибке и возмущающему воздействию, а также статических характеристик системы, полученных с помощью написанной программы и имитационной среды Simulink, можно сделать вывод, очевидно, что графики практически полностью совпадают. Небольшие различия обусловлены лишь различным шагом расчетов.
ДОПОЛНИТЕЛЬНОЕ ИССЛЕДОВАНИЕ СИСТЕМЫ
|
из
5.00
|
Обсуждение в статье: Составление программы для имитационного моделирования, используя структурную схему нелинейной автоматической системы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы