 |
Главная |


Алгоритм фильтрации технологического параметра
|
из
5.00
|
Исходные данные
АХ=2 К=1,5
АЕ=0,15 Т=40
ТХ=50 τ=15
ТЕ=8 Т0=1
Задача:
1. Отфильтровать входящий сигнал
2. Выделить полезную составляющую сигнала
3. Исследовать алгоритм настройки пропорционально-интегрального модулятора для построения замкнутой системы управления
Для выделения полезного сигнала, перед использованием его в качестве сигнала обратной связи регулятора. Выделяют несколько видов фильтров:
- Фильтр текущего среднего
- Экспоненциальный фильтр

Расчет фильтра текущего среднего
Находим:
x(t)=Ax*sinώxt - полезный сигнал
Е(t)=AE*sinώEt - помеха
z(t)=x(t)+E(t) - входной сигнал
ώx=  ώе=
ώе= 
y(t) - выходной сигнал
y2(t)=  [z(t)+z(t-1)]
[z(t)+z(t-1)]
y3(t)=  [z(t)+z(t-1)+z(t-2)]
[z(t)+z(t-1)+z(t-2)]
y4(t)=  [z(t)+z(t-1)+z(t-2)+z(t-3)]
[z(t)+z(t-1)+z(t-2)+z(t-3)]
Расчет экспоненциального фильтра
y(t)=б*y(t-1)+(1-б)*z(t-1)
б=exp(-  )
)
Тб=5ч10 для расчета выбираем 5
Расчеты сводим в таблицу:
|
| Алгоритм фильтрации |
|
|
|
| ||
| Ax= | 2 |
|
|
|
|
|
|
| Ae= | 0,15 |
|
|
|
|
|
|
| Tx= | 50 | юx= | 0,13 |
|
|
|
|
| Te= | 8 | юe= | 0,79 |
|
|
|
|
| Tб= | 5 | б= | 0,82 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| t | Z(t) | E(t) | X(t) | Y2(t) | Y3(t) | Y4(t) | Ya |
| 0 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 |
| 1 | 0,36 | 0,11 | 0,25 | 0,18 | 0,18 | 0,18 | 0,00 |
| 2 | 0,65 | 0,15 | 0,50 | 0,50 | 0,50 | 0,50 | 0,06 |
| 3 | 0,84 | 0,11 | 0,74 | 0,74 | 0,62 | 0,46 | 0,17 |
| 4 | 0,96 | 0,00 | 0,96 | 0,90 | 0,82 | 0,70 | 0,29 |
| 5 | 1,07 | -0,11 | 1,18 | 1,02 | 0,96 | 0,88 | 0,41 |
| 6 | 1,22 | -0,15 | 1,37 | 1,14 | 1,08 | 1,02 | 0,53 |
| 7 | 1,43 | -0,11 | 1,54 | 1,33 | 1,24 | 1,17 | 0,66 |
| 8 | 1,69 | 0,00 | 1,69 | 1,56 | 1,45 | 1,35 | 0,80 |
| 9 | 1,92 | 0,11 | 1,81 | 1,80 | 1,68 | 1,56 | 0,96 |
| 10 | 2,05 | 0,15 | 1,90 | 1,98 | 1,89 | 1,77 | 1,13 |
| 11 | 2,07 | 0,11 | 1,96 | 2,06 | 2,01 | 1,93 | 1,30 |
| 12 | 2,00 | 0,00 | 2,00 | 2,03 | 2,04 | 2,01 | 1,44 |
| 13 | 1,89 | -0,11 | 2,00 | 1,94 | 1,99 | 2,00 | 1,54 |
| 14 | 1,81 | -0,15 | 1,96 | 1,85 | 1,90 | 1,94 | 1,60 |
| 15 | 1,80 | -0,11 | 1,90 | 1,81 | 1,83 | 1,87 | 1,64 |
| 16 | 1,81 | 0,00 | 1,81 | 1,80 | 1,81 | 1,83 | 1,67 |
| 17 | 1,79 | 0,11 | 1,69 | 1,80 | 1,80 | 1,80 | 1,70 |
| 18 | 1,69 | 0,15 | 1,54 | 1,74 | 1,77 | 1,77 | 1,71 |
| 19 | 1,48 | 0,11 | 1,37 | 1,58 | 1,65 | 1,69 | 1,71 |
| 20 | 1,18 | 0,00 | 1,18 | 1,33 | 1,45 | 1,53 | 1,67 |
| 21 | 0,86 | -0,11 | 0,96 | 1,02 | 1,17 | 1,30 | 1,58 |
| 22 | 0,59 | -0,15 | 0,74 | 0,72 | 0,87 | 1,02 | 1,45 |
| 23 | 0,39 | -0,11 | 0,50 | 0,49 | 0,61 | 0,75 | 1,29 |
| 24 | 0,25 | 0,00 | 0,25 | 0,32 | 0,41 | 0,52 | 1,13 |
| 25 | 0,11 | 0,11 | 0,00 | 0,18 | 0,25 | 0,33 | 0,97 |
| 26 | -0,10 | 0,15 | -0,25 | 0,00 | 0,09 | 0,16 | 0,81 |
| 27 | -0,39 | 0,11 | -0,50 | -0,25 | -0,13 | -0,03 | 0,65 |
| 28 | -0,74 | 0,00 | -0,74 | -0,56 | -0,41 | -0,28 | 0,46 |
| 29 | -1,07 | -0,11 | -0,96 | -0,90 | -0,73 | -0,57 | 0,24 |
| 30 | -1,33 | -0,15 | -1,18 | -1,20 | -1,04 | -0,88 | 0,00 |
| 31 | -1,48 | -0,11 | -1,37 | -1,40 | -1,29 | -1,15 | -0,24 |
| 32 | -1,54 | 0,00 | -1,54 | -1,51 | -1,45 | -1,35 | -0,46 |
| 33 | -1,58 | 0,11 | -1,69 | -1,56 | -1,53 | -1,48 | -0,66 |
| 34 | -1,66 | 0,15 | -1,81 | -1,62 | -1,59 | -1,56 | -0,82 |
| 35 | -1,80 | 0,11 | -1,90 | -1,73 | -1,68 | -1,64 | -0,98 |
| 36 | -1,96 | 0,00 | -1,96 | -1,88 | -1,81 | -1,75 | -1,12 |
| 37 | -2,10 | -0,11 | -2,00 | -2,03 | -1,95 | -1,88 | -1,28 |
| 38 | -2,15 | -0,15 | -2,00 | -2,12 | -2,07 | -2,00 | -1,43 |
| 39 | -2,07 | -0,11 | -1,96 | -2,11 | -2,11 | -2,07 | -1,56 |
| 40 | -1,90 | 0,00 | -1,90 | -1,99 | -2,04 | -2,06 | -1,65 |
| 41 | -1,70 | 0,11 | -1,81 | -1,80 | -1,89 | -1,96 | -1,70 |
| 42 | -1,54 | 0,15 | -1,69 | -1,62 | -1,71 | -1,80 | -1,70 |
| 43 | -1,43 | 0,11 | -1,54 | -1,49 | -1,56 | -1,64 | -1,67 |
| 44 | -1,37 | 0,00 | -1,37 | -1,40 | -1,45 | -1,51 | -1,63 |
| 45 | -1,28 | -0,11 | -1,18 | -1,33 | -1,36 | -1,41 | -1,58 |
| 46 | -1,11 | -0,15 | -0,96 | -1,20 | -1,25 | -1,30 | -1,53 |
| 47 | -0,84 | -0,11 | -0,74 | -0,98 | -1,08 | -1,15 | -1,45 |
| 48 | -0,50 | 0,00 | -0,50 | -0,67 | -0,82 | -0,93 | -1,34 |
| 49 | -0,14 | 0,11 | -0,25 | -0,32 | -0,49 | -0,65 | -1,19 |
| 50 | 0,15 | 0,15 | 0,00 | 0,00 | -0,16 | -0,33 | -1,00 |
По полученным данным строим график

Исследование алгоритма управления

Находим:
x(t) – сигнал задания
у(t) = б*у(t-1)+k(1-б)*U(t-1-n) – выходной сигнал
где: б=exp(-  )
)
n= 
U(t)=U(t-1)+g0*E(t)+g*E(t-1) - сигнал на исполнительный механизм
Где: g0=kR g= -kR(1-  )
)
E(t)=x(t)-y(t) -ошибка регулирования
Для расчета изначально принимаем:
kR=0.05 - коэффициент усиления регулятора
ТI= 999 - время интегрирования
Расчетные данные сводим в таблицу : Приложение А.
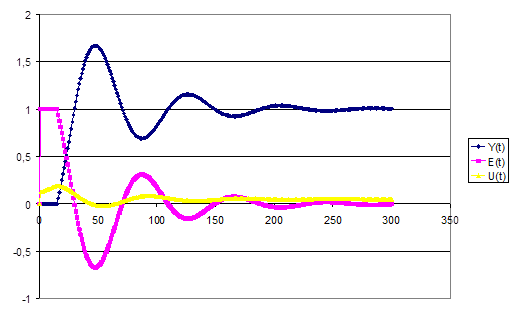
По полученным данным строим график:

Настраиваем регулятор:
1. Отключаем интегрирующую составляющую ТI=999
2. Постепенно увеличиваем коэффициент усиления регулятора, выводим систему в режим автоколебания.

3. Запоминаем значение коэффициента усиления регулятора соответствующее
режиму автоколебания
kRкр= 0,2486
kR= kRкр Определяем период автоколебания
ТА = 50 Вычисляем параметры:
kR= kRкр/2=0,1243
ТI=(0.3ч0.8)TA
TI=0.5*50=25
Строим график:
Литература
1. Рокотян С.С. и Шапиро И.М. - «Справочник по фильтрациям систем» 3-е издание, переработанное и дополненное, Москва, Энергоатомиздат, 1985 г; [1]
2.Солдаткина Л.А. – Автоматизированные информационные системы:учебное пособие для вузов. Москва, Энергия, 1978 г.;
|
из
5.00
|
Обсуждение в статье: Алгоритм фильтрации технологического параметра |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы