 |
Главная |


к курсовому проекту по курсу
|
из
5.00
|
Методические указания
"Компьютерные системы управления в производстве и бизнесе" для подготовки инженеров по специальности: 220301 "Автоматизация технологических процессов и производств".
Тула 2005
Разработали:
д.т.н., доцент В.С. Сальников
Заведующий каф. АСС: А.Н. Иноземцев
Редактор:
Регистратор:
Оформитель:
Содержание
| 1.Цель и порядок выполнения курсового проекта………………… | 3 |
| 2. Содержание и оформление курсового проекта…………………. | 3 |
| 3. Методические указания по выполнению курсового проекта….. | 7 |
| 3.1. Анализ кинематики станка……………………………………... | 7 |
| 3.2. Функциональная схема СЧПУ…………………………………. | 8 |
| 3.3. Функциональная и электрическая принципиальные схемы узла сопряжения СЧПУ ос станком………………………………... | 12 |
| 3.3.1. Узел связи с приводом………………………………………... | 13 |
| 3.3.2. Узел связи с аналоговыми датчиками……………………….. | 16 |
| 3.3.3. Узел связи с датчиком обратной связи……………………… | 17 |
| 3.3.4. Узел связи с электроавтоматикой станка……………………. | 22 |
| 3.4. Схемы электроавтоматики и подключение СЧПУ к станку…. | 26 |
| 3.5. Разработка алгоритма и программы цикла позиционирования | 31 |
| Список литературы…………………………………………………. | 37 |
1.ЦЕЛЬ И ПОРЯДОК ВЫПОЛНЕНИЯ КУРСОВОГО ПРОЕКТА
Целью данного курсового проекта является привитие у студентов навыков общего подхода к задачам проектирования СЧПУ металлорежущими станками, а также навыков самостоятельной инженерной работы при решении конкретных задач по их разработке и эксплуатации. Курсовой проект выполняется по одной из профилирующих дисциплин специальности 210200 и рассчитан на применение студентами знаний и навыков, полученных при изучении таких дисциплин как “Управление процессами и объектами машиностроения”, “Автоматизированный электропривод станков и промышленных роботов”, “Электроника и микропроцессорная техника систем управления”, “Схемотехника”, “Теория автоматического управления” и др.
Организация выполнения курсового проекта строится по принципу консультаций и самостоятельной работы студентов. Преподаватель осуществляет поэтапный контроль графика выполнения курсового проекта.
2. СОДЕРЖАНИЕ И ОФОРМЛЕНИЕ КУРСОВОГО ПРОЕКТА
Объектом курсового проекта является собственно СЧПУ, ее компоненты и связи с механическим модулем станка. Проект носит учебный характер и включает в себя следующие этапы:
1. Анализ кинематики станка и обоснование типа и числа управляемых и контролируемых параметров.
2. Уточнение функциональной схемы УЧПУ.
3. Разработка функциональной и электрических принципиальных схем узла сопряжения УЧПУ с приводом, датчиками или электроавтоматикой.
4. Обоснование необходимости построения контура адаптации и выбор контролируемого параметра.
5. Расчёт диаграммы нагружения одного из приводов станка при выполнении конкретной технологической операции.
6. Разработка электрических принципиальных схем узла измерения контролируемого для целей адаптации параметра.
7. Разработка блок-схемы алгоритма и программное обеспечение для одного из циклов интерполяции.
По результатам курсового проектирования в соответствии с требованиями стандартов ЕСКД оформляется пояснительная записка объемом 30-40 страниц рукописного текста и графический материал объемом 2,5-3 листа формата А1.
Графическая часть должна содержать:
-функциональную схему УЧПУ;
-функциональную схему интерфейса связи со станком;
-электрические принципиальные схемы интерфейса связи со станком (буферную схему и дешифратор адреса, внутренние регистры данных и оптронные развязки и т. д.);
-электрическую принципиальную схему канала измерения контура адаптации;
-диаграмму нагружения одного из приводов;
-блок-схему алгоритма цикла интерполяции.
Задание на курсовой проект выдается типом конкретного станка и вариантом задания (n), который равен порядковому номеру студента в общем списке группы.
Задание выдается в виде бланка задания, в котором указаны модель станка, тип привода подачи, цикл интерполяции, контролируемый параметр требующим своей реализации в курсовом проекте, код ее равен номеру задания (N). Необходимо
Для систем с мультиплексированной шиной адрес внешнего устройства принять равным А8=АБ+Х8, где АБ – начальный адрес, закрепленный за внешними устройствами в данной СЧПУ, а Х8 = N8.
В расчетах принять допущение, что система управления с разомкнутой главной обратной связью описывается передаточной функцией, имеющей первый порядок астатизма
 (2.1)
(2.1)
где К- коэффициент усиления системы по одной из координат, 1/c;
Т – постоянная времени системы, с.
С целью сохранения устойчивости и обеспечения колебательного прехода процесса принять:
К=100 + 5n, 1/с; Т=0,5(l+1)×10-2, c
3. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ
КУРСОВОГО ПРОЕКТА
3.1. Анализ кинематики станка
Если в качестве базового предложен какой либо универсальный станок, то необходимо произвести его модернизацию с целью обеспечения управления его от ЧПУ. Если тип приводов подач в задании не соответствует приводам базовой модели, то студент самостоятельно вносит изменения в кинематическую схему.
Во всех случаях необходимо из общих соображений дать обоснование
применения имеющихся приводов подачи и главного движения, если они не
соответствуют заданию, предложить свои типы приводов (мощность, крутящий момент, максимальная скорость, диапазон регулирования, режим работы).
На основании проведенной работы делается заключение о количестве и типе управляемых и контролируемых параметров, делаются рекомендации по их обработке и формирования. Формируются требования по входам и выходам СЧПУ.
3.2. Функциональная схема СЧПУ
В качестве базовой модели СЧПУ в курсовом проекте берется одна из известных систем: “Электроника НЦ-31”, “Электроника НЦ-80” (МС2101), 2С32 (2Р32). Их функциональные схемы приведены в [8]. Интерфейсная часть приведенной в проекте СЧПУ должна четко отражать вариант задания по:
количеству ЦАП и АЦП;
интерфейсу ДОС;
Количеству входов/выходов интерфейса ЭА.
При этом необходимо определить:
область ОЗУ;
закрепить ячейки памяти за соответствующей информацией;
закрепить выходные каналы ЦАП и АЦП за соответствующими координатами.
Рекомендуется область памяти оформить в виде архива, рассчитанного на несколько управляющих программ. Для обработки корпусной детали (3-х координатная СЧПУ) средней сложности требуется до 300-1000 кадров программы.
Для записи кода (адреса) команд технологической группы достаточно одной ячейки памяти. Для записи числовой информации после кода этих команд (G, N, M, S) достаточно двух десятичных разрядов.
По адресам координатных перемещений (X, Y, Z) необходимо определить величину максимального перемещения в дискретах
Nmax = Xmax /D (3.1)
где D - цена одной дискреты, мм;
Xmax – максимальное перемещение по координате Х, мм.
При этом рекомендуется брать максимальное число, соответствующие полученному количеству разрядов (например, если Nmax = 80000, то необходимо принять  = 99999 = 105 - 1)
= 99999 = 105 - 1)
 = 10n – 1
= 10n – 1
где n – число разрядов Nmax.
При представлении числа необходимо учитывать знаковый разряд, тогда для записи Хmax необходимо n + 1 десятичный разряд, один из которых знаковый.
Емкость одной ячейки памяти – 1 байт двоичной информации. Если принять восьмеричную систему счисления, то в две последовательные ячейки (16 бит) могут быть записаны 5 разрядов восьмеричного числа (16/3 = 5+1/3). Для записи  необходимо m ячеек памяти
необходимо m ячеек памяти
 (3.2)
(3.2)
Стандартный кадр управления программы круговая интерполяция без указания скорости подачи имеет вид:
G02 X + Xmax Y + Ymax I + Xmax J + Xmax (3.3)
и занимает объем
1 + 1 + 1 +  + 1 + + 1 + + 1 + = 6 + 4
+ 1 + + 1 + + 1 + = 6 + 4
ячеек памяти. Таким образом, если ввести пересчет управляющей программы через кадры круговой интерполяции, то объем памяти необходимый для ее хранения
VОЗУ = (300¼1000)×(6 + 4 )
Например, при Xmax = 800 мм, D = 0,01 мм, = 3
VОЗУ = 300×18 = 5400 байт =5,4 Кбайт
Необходимо также задать адреса всех периферийных устройств: регистров ЦАП и АЦП, ЭКА и ДОС.
Следует учитывать, что начальная область ПЗУ используется для размещения векторов прерываний и резидентных тестов, в системах с общей шиной адреса периферийных устройств располагаются начиная с адреса 1760008, данные и адреса представлены в восьмеричной системе. Кроме управления приводами перемещений СЧПУ организует и формирует сигналы управления электроавтоматикой станка. Поэтому необходимо определить входные и выходные сигналы и емкость входных и выходных регистров, учитывая двоично-десятичный формат представления функций.
Отметим некоторые из этих сигналов:
а) для каждой координаты сигналы:
с конечных выключателей крайних положений;
с конечных выключателей нулевого положения исполнительных органов;
с конечных выключателей замедления скорости при подходе к нулевому положению (1 или 2).
б) для привода главного движения:
с узла фиксации инструмента.
в) общий стоп.
г) готовность станка и др.
Определить максимальное время формирования управляющих импульсов
 Гц (3.4)
Гц (3.4)
где Vбх – скорость быстрых ходов, м/мин;
fmax – максимальная частота импульсов, поступающих с ДОС в СЧПУ.
Минимальный период выдачи импульсов на выходе ЦАП определяется временем вычислительных операций, выполняемых в соответствии с заданным алгоритмом позиционирования. В предлагаемых заданиях на проект цикла позиционирования число вычислительных операций: логических и арифметических, которые необходимо выполнить, чтобы сформировать выходной сигнал на ЦАП лежит в пределах от 6 до 14 операций (или от 12 до 30 команд)
tmin = W-1×n
где tmin – время вычислительных операций, с;
W – быстродействие микроЭВМ – СЧПУ, оп/с;
n – число команд по программе, реализующей алгоритм позиционирования (определяется в п. 3.5).
Тогда максимальное время формирования управляющего сигнала на выходе ЦАП
tmах = 1/fmax + К tmin + tАП, (3.5)
где К – коэффициент, учитывающий несоответствие реальной длительности выполнения операций алгоритма позиционирования длительности операций, используемых для определения W (принять К = 1,5);
tАП – время задержки в аппаратной части ЦАП или время преобразования.
В реальных системах tmах на два, три порядка меньше постоянной времени привода подачи или всей системы (Т) и всегда меньше 1/fmax.
3.3. Функциональная и электрическая принципиальные схемы узла сопряжения СЧПУ ос станком.
В данной курсовом проекте разработке подвергается один из четырех узлов сопряжения СЧПУ со станком: узел связи с приводом на основе ЦАП: узел связи с аналоговым датчиками на основе АЦП; узел связи с электроавтоматикой станка; узел связи с датчиком обратной связи (датчик положения).
В этой части необходимо определить:
функциональную схему или структуру узла связи;
количество линий связи или разрядность цифровых устройств, частоту обмена информацией;
составить электрическую принципиальную схему и дать описание ее работы.
3.3.1. Узел связи с приводом
Функциональная схема узла связи с приводом (УСП) так же, как и его принципиальная схема существенно зависят от типа выбранного ЦАП. Однако во всех случаях на функциональной схеме должно быть показано необходимое количество каналов (2 или3) устройство распознания адреса (дешифратор адреса) необходимые элементы управления работой ЦАП, регистр ошибки, собственно ЦАП, необходимые оптронные развязки и т.д.
Разрядность регистра ошибки nRO определяется величиной ошибки, выраженной в единицах дискреты:
 , (3.6)
, (3.6)
где К – коэффициент усиления СЧПУ, 1/с;
D - величина дискреты, мм/имп.
Например, если в исходных данных К = 100 1/с, а D = 4×10-4 мм/имп (ВЕ 51) и Vmax = 10 м/мин, то
 ед., т.е. nRO = 11
ед., т.е. nRO = 11
Наиболее важными характеристиками ЦАП, определяющими работу узла связи СЧПУ с приводом, является разрядность преобразуемого кода и время преобразования. При выборе разрядности ЦАП необходимо обеспечить требуемый диапазон регулирования скорости. Диапазон регулирования скоростей приводов подач в станках, как правило, лежит в пределах от Д = 1000:1 до 10000:1. Разрядность ЦАП
nRЦ = log2 Д (3.7)
Передача информации от СЧПУ к ЦАП, как правило, осуществляется на постоянной несущей частоте fK  (5¼10) w C /2 p, где w C - частота среза привода. На основании анализа асимптот логарифмических амплитудно-
(5¼10) w C /2 p, где w C - частота среза привода. На основании анализа асимптот логарифмических амплитудно-
частотных характеристик в первом приближении частоту среза для m = КТ > 1 можно определить из выражения:
 , (3.8)
, (3.8)
Для случая m = KT < 1

Время преобразования ЦАП t n должно удовлетворять условию
 (3.9)
(3.9)
В этом случае быстродействие ЦАП практически не сказывается на динамику станка. Исходя из рассчитанных значений nRЦ и t n выбирают нужный ЦАП. ЦАП может работать в двух режимах – двукратного и четырехкратного умножения.
В режиме четырех кратного умножения для всего диапазона преобразуемых кодов выходное напряжение имеет один знак. Однако приводы станков реверсивные, что требует двухполярного выходного напряжения. В силу этого работу ЦАП надо организовать таким образом, чтобы напряжение на выходе меняло знак. Это может быть достигнуто путем переключения знака опорного напряжения на входе ЦАП или использование специальных схем, устанавливаемых на выходе.
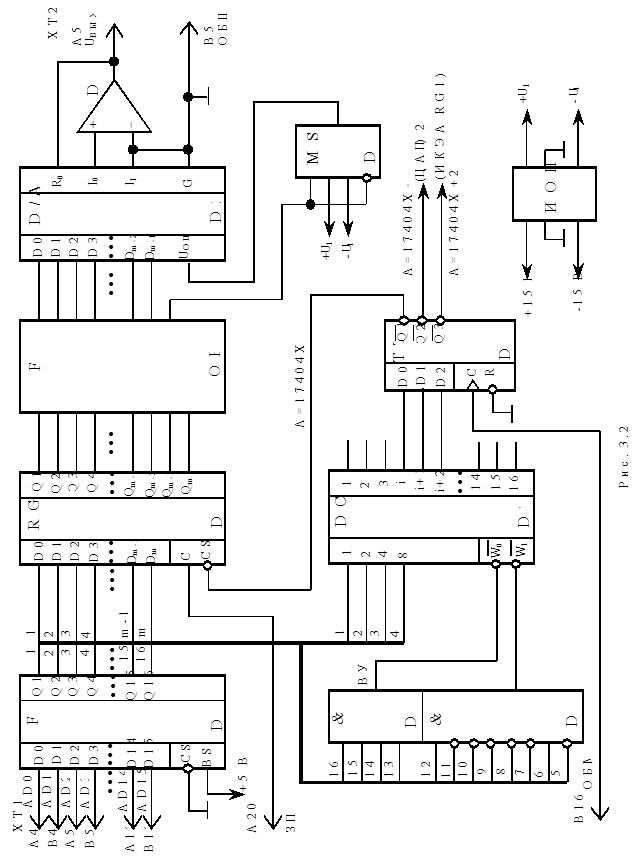
В режиме двукратного умножения весь диапазон входных кодов разбивается пополам за счет соответствующего включения самого ЦАП. При этом разрядность входного кода уменьшается ровно вдвое. На это стоит обратить внимание при построении аппаратной части преобразователя. Для глубоко регулируемых приводов входной код, преобразуемый в напряжение имеет значительную разрядность. В этом случае необходимо использовать специализированные схемы ЦАП [5]. Пример подключения ЦАП к каналу микроЭВМ показан на функциональной схеме рис. 3.2.
В ее состав входит буферный регистр памяти D2, соответствующей разрядности. Регистр имеет входы управления для выбора микросхемы (CS) и записи (С). Выбор микросхемы осуществляется по адресу, формируемому на выходе элемента D8. Все выходы буферного регистра подключены к ЦАП через оптронные развязки, которые обеспечивают гальваническую развязку СЧПУ от периферийных устройств. Это способствует повышению ее надежности и помехозащищенности. Необходимо выбрать тип оптронов и рассчитать параметры сопротивлений. Одним из разрядов регистра D2 используется для передачи информации о знаке. Выход этого разряда подключается к соответствующим входам мультиплексора D9, обеспечивающего переключение знака опорного напряжения на входе ЦАП D3. Микросхема D4 преобразует выходной ток ЦАП
в напряжение. В качестве ЦАП может использоваться преобразователь с встроенными регистрами и дополнительными каналами управления
|
3.3.2. Узел связи с аналоговыми датчиками
для преобразования аналоговых сигналов в код используются аналогово-цифровые преобразователи (АЦП) [5].
Как для ЦАП так и для АЦП основными характеристиками, определяющими возможность их использования в конкретной СЧПУ является разрядность и время преобразования.
В курсовом проекте будем считать, что АЦП предназначен для контроля некоторого параметра контура адаптации, то есть на его выходе присутствует сигнал, изменяющийся в пределах ±10 В.
В этом случае разрядность может быть определена по зависимости (3.7). допустимое время преобразования можно определить на основании частоты среза системы wс, аналогично, как и для ЦАП по (3.9).
Схемное решение АЦП аналогично ЦАП. Отличие заключается в направлении передачи информации и дополнительных сигналах управления [5]. При вычерчивании принципиальных схем необходимо учитывать тип шины СЧПУ, характер процедуры обмена информацией процессора с периферией, назначение и возможные режимы работы всех используемых в устройстве микросхем.
3.3.3. Узел связи с датчиком обратной связи.
Измерительная система состоит из ДОС и преобразующего устройства. В качестве ДОС в станкостроении используются самые различные датчики. В курсовом проекте использованы три типа датчиков: фотоимпульсный типа ВЕ-51 (ВЕ-178) и инуктивные-сельсин типа БС-155 и вращающийся трансформатор типа ВТ. Сельсин может работать в нескольких режимах. В курсовом проекте будем предполагать, что он используется в фазовом режиме при этом выходной сигнал определяется
 (3.10)
(3.10)
где j - сдвиг фазы выходного напряжения относительно опорного напряжения  ; w - частота изменения опорного сигнала.
; w - частота изменения опорного сигнала.
В фазовом режиме имеет место линейность преобразования угла поворота датчиков µ в фазовый сдвиг выходного напряжения j. Коэффициент преобразования ДОС
 (3.11)
(3.11)
Измерительная система должна обеспечивать:
требуемую точность измерения, что определяется единицей дискреты;
преобразование фазного сдвига в код;
абсолютное перемещение во всем диапазоне.
В проекте следует:
определить передаточное число приборного редуктора;
определить частоты заполнения фазы и сопоставить функциональную схему преобразования фаза-код, предложить алгоритм подсчета числа оборотов датчика, т.е. абсолютного перемещения;
обосновать принцип формирования питающего напряжения ДОС;
составить измерительную схему измерительной системы, определить коды констант, емкость цифровых устройств с учетом служебных кодов, время формирования кода абсолютного перемещения;
составить электрическую принципиальную схему измерительной системы, которая должна содержать схему дешифрации адреса, схемы преобразователя фаза-код (ПФК), записи ДОС и др., привести описание схемы.
Требуемая величина единицы дискреты (D) обуславливается ценой оборота ДОС (ОД) и числом делений фазы (q). В зависимости от шага ходового винта (hВ) ДОС сочленяется с ним непосредственно или через приборный редуктор с передаточным числом i.
 ; (3.12)
; (3.12)
Рекомендуется принять шаг винта (hВ) из ряда 5, 8, 10, 15, 20 мм. Далее по заданию из справочной литературы определяются все основные характеристики ДОС. Преобразование фазовый сдвиг- код целесообразно осуществлять с помощью время импульсного ПФК. Принцип его основан на преобразовании фазного сдвига во временной интервал. Который заполняется импульсами частотой fr и организует их счет
fr = fДОС × q (3.13)
где fДОС – частота изменения питающего напряжения ДОС.
(Для БС 155 принять fДОС = 400¼1000 Гц).
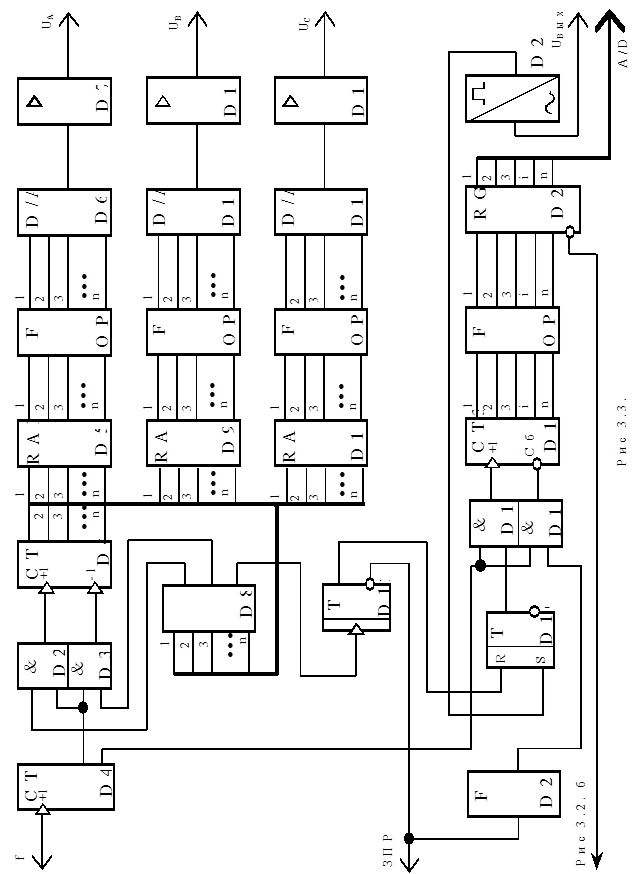
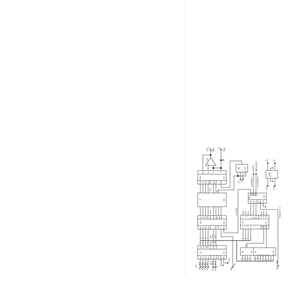
Для питания ДОС необходимо реализовать трехфазное напряжение со сдвигом 1200.В качестве примера рассмотрим схемное решение измерительной системы с ДОС типа сельсин рис. 3.3.
Схема содержит формирователи трех синусоидальных напряжений сдвинутых относительно друг друга на 1200 (D5, D6, D7, OP1, D9, D10, D11, D13, D14, D15, OP13), подаваемых на обмотки питания сельсина. Каналы идентичны и отличаются лишь тем, что в элементах D5, D9, D13 (ПЗУ) записаны коды синусоид, сдвинутых на 1200. Для формирования значения синуса во всех четырех квадрантах используется устройство управления D8. Выходной сигнал с ДОС поступает через формирователь D21 на триггер D16. Время его открытого состояния соответствует фазовому сдвигу сигнала с ДОС относительно опорного сигнала. Этот интервал заполняется частотой fr с делителя частоты D1. Таким образом, код в счетчике D19 является кодом фазового сдвига. Далее этот код переписывается через оптронную развязку ОР4 в буферный регистр D20 и с него считывается процессором. Формирование абсолютного перемещения осуществляется программным способом.
Необходимо разработать принципиальную схему дешифрации адреса устройства ПФК и схему управления ей.
|
Алгоритм определения абсолютного отсчета основан на суммировании текущего кода фазы К j , кода константы L, соответствующего одному обороту датчика. При n оборотах датчика код соответствующий абсолютному перемещению равен
N j = K j + n L (3.14)
Константа одного оборота L = log2 q .
Для формирования сигнала поворота ротора ДОС на ОДИН оборот и направления движения используется последовательность измерений L1 < L2 < ¼ < Li < L. Причем Li < L.
На основании анализа очередности достижения кодом фазы K j значений Li делается заключение о направлении перемещения и завершении одного оборота. Как правило, L1 = 0, Ln = L. При движении в прямом направлении происходит изменение кодов в очередности L1 , L2 , L3 ¼ Ln , L1 , L2 ¼ Причем переход Ln L1 соответствует завершению оборота.
При движении в обратном направлении Ln , Ln-1 , ¼ L3 , L2 , L1 , Ln , Ln-1 то есть переход L1 Ln соответствует завершению оборота в другом направлении.
Время формирования текущего значения измеряемых координат t
t = t0 + tАП + tР , (3.15)
где t0 - время получения кода фазы с датчика, с;
tАП – время задержки в аппаратной части измерительной системы;
tР – время расчета абсолютного перемещения.
В первом приближении для оценки можно считать t0 = 1/ fДОС
Однако с целью разделения интервалов измерения и считывания информации целесообразно
 (3.16)
(3.16)
Задержка аппаратной части определяется на основании принципиальной схемы измерительной системы и временем необходимым процессору на обслуживание прерывания (tАП » 25 мкс). Время расчета tР – определяется сложностью алгоритма расчета и необходимой разрядностью. В расчетах можно принять tР = 0,5 ¼2 мс. Необходимо обеспечить, чтобы при максимальной скорости перемещения за t не происходило полного оборота ДОС, т.е.
 (3.17)
(3.17)
В противном случае происходит потеря информации в цепи ДОС и ее разрыв.
Для фотоимпульсного датчика необходимо определить передаточное число приборного редуктора
I = OД / hB (3.18)
Разрядность первичного счетчика импульсов необходимо определить из такой характеристики ДОС, как число импульсов на оборот (%). Разрядность счетчика определяется из зависимости
 (3.19)
(3.19)
Принципиальная схема интерфейса должна содержать кроме реверсивного счетчика схему определения направления перемещения, дешифратор адреса, буферный регистр и канал запроса на прерывание от нуль метки датчика. Схема интерфейса показана на рис. 3.4., в ней для упрощения схемного решения не предусмотрено увеличение разрешающей способности ДОС путем Удвоения или учетверения числа импульсов с датчика.
Следует отметить, что в микропроцессорном комплекте серии К1801 имеется специальная БИС К1801ВП1-015, предназначенная для связи процессора с фотоимпульсными датчиками, решающая все перечисленные выше задачи.
3.3.4. Узел связи с электроавтоматикой станка
На основании результатов, полученных в 3.1., проектируется интерфейс на соответствующее число входов и выходов. При разработке принципиальной схемы для упрощения задачи необходимо указать на ней дешифратор адреса, два буферных регистра по 8 разрядов на входные и выходные сигналы, оптронные развязки на входах и выходах. Будем предполагать, что на выходах реализуется М – функция, на входах подключаются конечные выключатели.
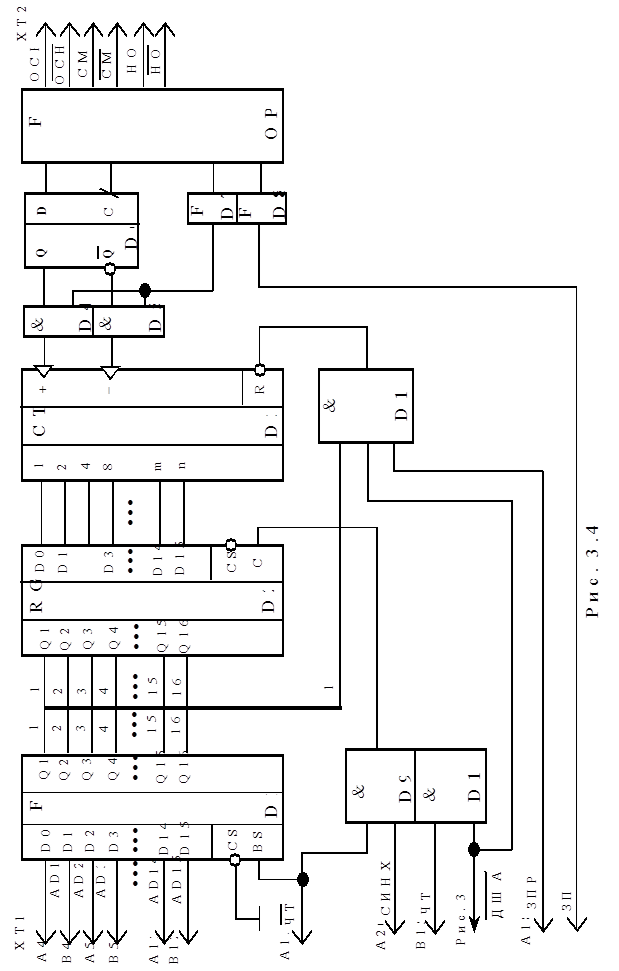
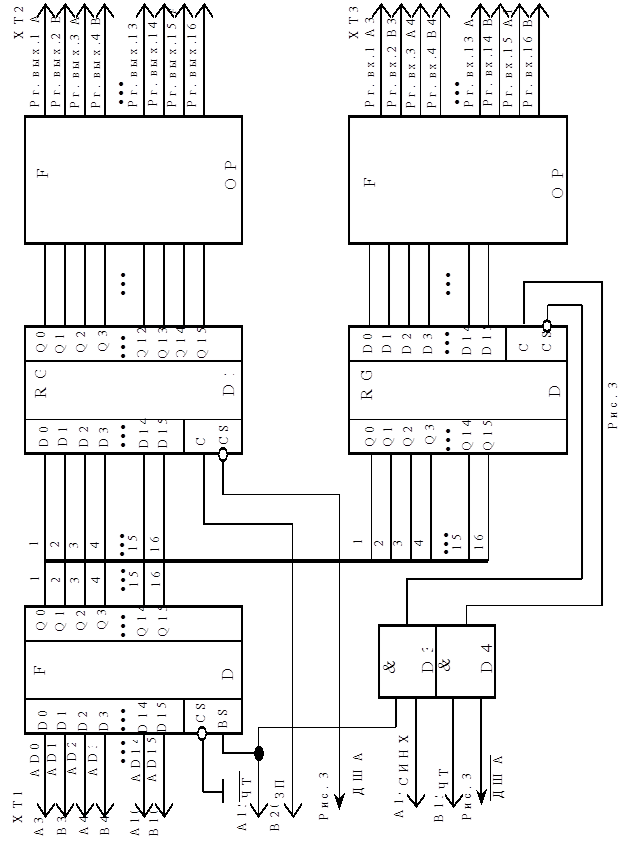
Схема интерфейса показана на рис. 3.5. Расчет выходной оптронной развязки производить на напряжение 24 В и ток не менее 200 mA, расчет входной оптронной развязки производить на напряжение 24 В и ток не более 15 mA.
3.5. Алгоритмы интерполяции.
Алгоритм интерполяции координирует движения приводов по осям станка.
Существует ряд алгоритмов, решающих эту задачу. Для обеспечения управления приводами подач с высокой скоростью применяют метод покодовой интерполяции, при котором выдаваемая на управление информация содержит приращение по координатам за некоторое время t. На высоких скоростях эти приращения существенно больше величины дискреты, однако информация поступает с частотой, намного превышающей пропускную способность привода.
Можно выделить два способа реализации алгоритмов покодовой интерполяции: непосредственный с расчетом приращений по исходным формулам и косвенный, согласно которому приращения получаются в результате приведения исходных формул к определенному виду.
Примером косвенного способа является реализация алгоритмов' покодовой интерполяции с использованием метода оценочной функции с переменным шагом и представлением данных в разрядности слова процессора. Эти алгоритмы могут быть использованы не только в процессе интерполяции, но и при расчете эквидистанты, скорости перемещения по координатам и при других расчетах, требуемых для получения геометрической информации.
Алгоритмы реализуют следующую функцию для линейной интерполяции:  , где хК и уК - координаты конечной точки интерполируемого отрезка прямой;
, где хК и уК - координаты конечной точки интерполируемого отрезка прямой;  и
и  - приращения координат за время t (рис. 2.1, а). Для круговой интерполяции по часовой стрелке
- приращения координат за время t (рис. 2.1, а). Для круговой интерполяции по часовой стрелке  и
и  - соответственно в первой и второй половинах первого квадранта; здесь х0 и у0 - координаты точки дуги окружности, от которой рассчитываются очередные приращения по координатам (рис. 2.1, б). Следует отметить, что до обращения к алгоритму определяется перемещение по ведущей оси ( или
- соответственно в первой и второй половинах первого квадранта; здесь х0 и у0 - координаты точки дуги окружности, от которой рассчитываются очередные приращения по координатам (рис. 2.1, б). Следует отметить, что до обращения к алгоритму определяется перемещение по ведущей оси ( или  ) в зависимости от заданной скорости и времени t, а окончание отработки перемещений в заданном кадре контролируется вне алгоритма.
) в зависимости от заданной скорости и времени t, а окончание отработки перемещений в заданном кадре контролируется вне алгоритма.
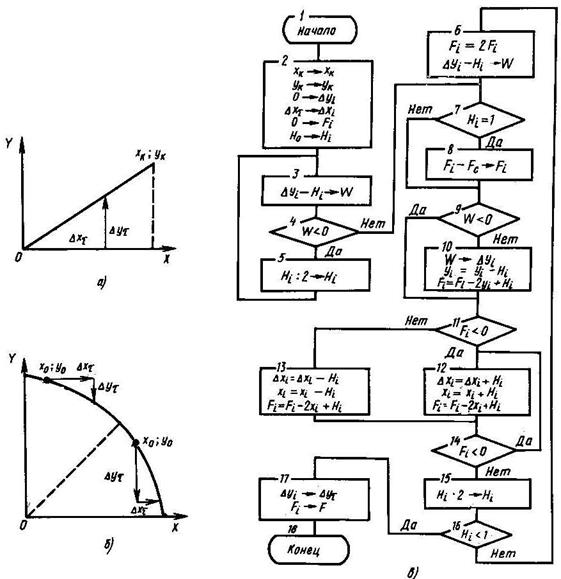
Рис.1 Линейная (а) и круговая (б) покодовая интерполяция и алгоритм (в) покодовой круговой интерполяции в первом полуквадранте; во вотором полуквадранте изменяется содержимое блока 10 (  ;
; 
 ;
;  ); блока 12 (
); блока 12 (  ;
;  ;
;  ); блока 13 (
); блока 13 (  ;
;  ;
;  )
)
Алгоритм линейной интерполяции реализует зависимость  ; в нем использована оценочная функция вида
; в нем использована оценочная функция вида  , где Hi — шаг интерполяции в i-м цикле; xi , yi - координаты текущей точки в i - м цикле.
, где Hi — шаг интерполяции в i-м цикле; xi , yi - координаты текущей точки в i - м цикле.
Алгоритм работает следующим образом. По заданному  (остаток перемещения по оси Х; при i = 0
(остаток перемещения по оси Х; при i = 0  ) выбирается такой шаг Hi , чтобы выполнялось условие
) выбирается такой шаг Hi , чтобы выполнялось условие  . Далее делается шаг по оси Х величиной Hi, рассчитывается значение
. Далее делается шаг по оси Х величиной Hi, рассчитывается значение  и анализируется Fi . Если
и анализируется Fi . Если  , то делается шаг Hi в положительном направлении оси Y, а если
, то делается шаг Hi в положительном направлении оси Y, а если  , то шаг в отрицательном направлении, и рассчитываются значения
, то шаг в отрицательном направлении, и рассчитываются значения  впервом случае и
впервом случае и  во втором случае.
во втором случае.
Шаги Hi по оси Y делаются до тех пор, пока выполняется условие Fi < 0.. Если оно не выполняется, т. е. , то происходит переход к следующему циклу, для которого рассчитывается  и
и  . При
. При 
 , и процесс прекращается.
, и процесс прекращается.
В начале отработки алгоритма Fi = 0. Промежуточная точка траектории, определяемая приращениями  и
и  , в общем случае не лежит на прямой, заданной координатами
, в общем случае не лежит на прямой, заданной координатами  и
и  , поэтому конечное значение
, поэтому конечное значение  . Во избежание накопления ошибки при последовательных вычислениях значений , запоминается конечная величина Fi, полученная в предыдущем цикле вычислений, и добавляется к текущему значению Fi следующего вычисления.
. Во избежание накопления ошибки при последовательных вычислениях значений , запоминается конечная величина Fi, полученная в предыдущем цикле вычислений, и добавляется к текущему значению Fi следующего вычисления.
Величина начального шага выбирается исходя из характеристик привода.
Аналогично работает алгоритм при круговой интерполяции.
В первом полуквадранте решается уравнение вида  по оценочной функции
по оценочной функции  . Ведущей координатой является Y. Во втором полуквадранте решается уравнение вида
. Ведущей координатой является Y. Во втором полуквадранте решается уравнение вида  и ведущей является координата X. При этом изменяется содержание трех блоков алгоритма по рис. 2.1.
и ведущей является координата X. При этом изменяется содержание трех блоков алгоритма по рис. 2.1.
Порядок работы блоков следующий. В блоке 2 исходные данные  ,
,  ,
,  , ,
, ,  и
и  вводятся в рабочие ячейки. Начальный шаг Hi выбирается в блоках 3, 4 и 5. На этом работа вспомогательной части алгоритма заканчивается, и происходит переход к основной части, причем в ячейке W сохраняется значение
вводятся в рабочие ячейки. Начальный шаг Hi выбирается в блоках 3, 4 и 5. На этом работа вспомогательной части алгоритма заканчивается, и происходит переход к основной части, причем в ячейке W сохраняется значение  .
.
3.6.Канал адаптивного управления.
Адаптивное управление подразумевает приспосабливание объекта к изменяющимся условиям функционирования. Современные системы ЧПУ обладают огромными вычислительными мощностями и большим быстродействием. Они способны реализовать такое управление в режиме реального времени. Для механической обработки это в частности означает поддержание условий резания в оптимальных границах при изменении порой случайным образом таких факторов, как припуск, механические характеристики обрабатываемого материала, состояние режущего инструмента, технологической системы и т. д. Нет однозначного критерия оценки условий в зоне резания. Наиболее информативным параметром в этом плане вероятно является температура в зоне резания. Однако её прямое измерение сопряжено с большими техническими трудностями (малая величина- единицы милливольт, большое зашумление и т. д.). В связи с этим наиболее часто используют некоторые косвенные параметры. К ним относят силы резания, мощность и ток потребляемые приводами подачи и главного движения, уровень вибраций в технологической системе и т. д.. В качест
|
из
5.00
|
Обсуждение в статье: к курсовому проекту по курсу |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы