 |
Главная |


Online-программирование.
|
из
5.00
|
Это программирование непосредственно на месте установки робота, с помощью самого робота. К данному способу относятся два метода Teach-In и Playback.
1.4 .1.1 Метод Teach-In.
При Teach-In методе (сокращенно Teachen) движение робота в пространстве к заданному участку производится управляющей консолью (в виде джойстика или кнопок). В большинстве случаев, в самом роботе (в 1-ю ось) заложена система координат, связанная в свою очередь посредством кинематической цепи с самой удалённой точкой робота (например, 6-й осью у 6-ти осевого робота). Таком образом местоположение и ориентация всех осей и предполагаемого инструмента робота в пространстве всегда известны.
Достигнутое местоположение (пункт) запоминается контроллером робота, и выполняется до тех пор, пока робот не выполнит все требуемые операции. Совокупность таких пунктов, определяет траекторию самостоятельного движения робота. Каждый пункт имеет определенное количество изменяемых параметров, скорость движения и углового вращения, точность, конфигурацию осей.
1.4 .1.2 Метод Playback.
Робот посредством человека, в ручную, обводится по траектории предполагаемого движения, которая в последствии в точности повторяется роботом. Этот метод часто применяется при программирование роботов для лакирования и покраски.
К недостаткам Online - программирования относится то, что во время программирования, не может быть речи о производственном процессе. Такое программирование не обеспечивает высокой точности обработки и конечно не очень удобно для каких-либо изменений.
1.4 .2 Offline программирование
Данный вид программирования производится на обыкновенном компьютере; без непосредственного участия робота. Тем самым дает возможность программирования робота без остановки производственного процесса.
Текстовое программирование (Описание течения программы языком программирования). Это, по сути дела, написание логики программы (последовательность траекторий, опрос периферийных устройств, коммуникация с обслуживающим персоналом и конечно техника безопасности). Изготовленная таким образом программа загружается тем или иным способом (дискета или сетевое соединение) в контроллер робота, проходит тест на ошибки, программа корректируется и в принципе готова к использованию.
1.5 Достоинства использования промышленных роботов.
1. достаточно быстрая окупаемость
2. исключение влияния человеческого фактора на конвейерных производствах, а также при проведении монотонных работ, требующих высокой точности;
3. повышение точности выполнения технологических операций и, как следствие, улучшение качества;
4. возможность использования технологического оборудования в три смены, 365 дней в году;
5. рациональность использования производственных помещений;
6. исключение воздействия вредных факторов на персонал на производствах с повышенной опасностью;
2. Описание промышленного робота IRB 2400.
2.1 Структура робота IRB 2400.
Робот состоит из двух главных частей, как показано на рисунке 1.



Рисунок 2.1 Робот IRB 2400.
2.2 Манипулятор.
Манипулятор оборудован двигателями переменного тока, которые имеют электромеханические тормоза. Тормоза блокируют двигатели, когда робот является недействующим в течение больше чем трех минут.
2.3 Контроллер робота.
|
|
 Подобный блок программирования используется для ручного ввода рабочих положений робота. Также у него есть функции для проверки всей запрограммированной последовательности перемещений, после того как она введена. Компактный, модульный контроллер является составной частью системы робота. Он содержит ЦП и мощную электронику для питания и управления роботом. Контроллер используется для управления манипулятором и обеспечивает оптимальную работу и функциональные возможности.
Подобный блок программирования используется для ручного ввода рабочих положений робота. Также у него есть функции для проверки всей запрограммированной последовательности перемещений, после того как она введена. Компактный, модульный контроллер является составной частью системы робота. Он содержит ЦП и мощную электронику для питания и управления роботом. Контроллер используется для управления манипулятором и обеспечивает оптимальную работу и функциональные возможности.
Рисунок 2.2 Внешний вид контроллера робота.
2.3.1 Электронный блок.
Весь контроль и управляющая электроника, кроме платы последовательных измерений, которая расположена в манипуляторе, собраны в контроллере.

Рисунок 2.3 Расположение электронных панелей и блоков за передней дверцей.
Блок управления включает следующие части:
1. Плата управления роботом содержит элементы, используемые, для управления движением манипулятора и обработки информации.
2. Плата памяти - содержит дополнительную оперативную память 6, 8 и 16 MB.
3. Материнская плата - содержит память RAM на 4 MB и управляет системой робота.
4. Дополнительные платы – платы связи, содержащие кругообороты для сети Network и коммуникации через bas-шину.
5. Блок питания преобразует входное напряжение в 4 регулируемых и защищенных от короткого замыкания напряжения для различных плат.
6. Модуль связи преобразует трехфазное переменное напряжение в постоянное напряжение.
Плата последовательных измерений (в манипуляторе) собирает данные исполняющего устройства и передает их последовательно плате управления роботом. Плата последовательных измерений питается батареей так, чтобы информация не была потеряна в случае отключения питания.
2.4 Компьютерная система
Материнская плата и плата управления роботом - центр обработки данных. Они обладают всеми функциями, требуемыми для создания, выполнения и хранения программы робота. Они также содержат функции для координации и регулировки движения осей.
На рисунке 6 показано, как центр обработки данных связан с другими блоками.
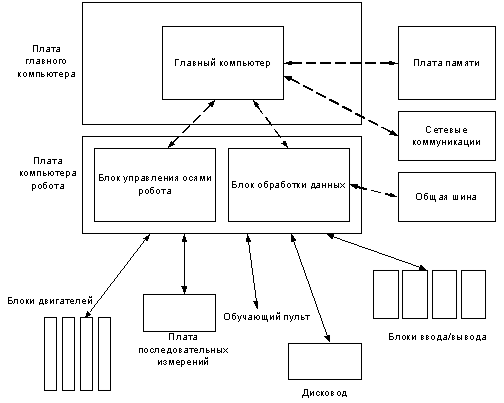
Рисунок 6. Интерфейсы компьютерной системы робота IRB 2400.
Главный компьютер осуществляет сбор информации, поступающей с блока обработки данных и от других компьютеров сети Network. На блок обработки данных поступают сигналы :
§ от пульта управления. Управление производится оператором вручную при программировании робота и при корректировке программ.
§ с дисковода. На дискетах хранится рабочие программы робота, которые при запуске системы необходимо подгружать в оперативную память робота.
§ с блоков ввода/вывода, на которые поступают сигналы с датчиков, необходимых для корректной и безопасной работы робота, а в свою очередь с блоков ввода/вывода на периферийные устройства поступают сигналы о готовности систем робота к выполнению поставленных задач.
На основе полученной и обработанной информации главный компьютер формирует управляющие сигналы, которые через блок управления осями робота и с учетом заданной программы осуществляет запуск двигателей соответствующих осей. Контроль выполнения программ осуществляется с помощью платы последовательных измерений.
2.5 Сравнение робота IRB 2400.
Надежный - Длительный период безотказной работы
IRB 2400 - самый популярный промышленный робот в мире (более чем 14 000 установленных роботов этого типа на сегодняшний день). Надежная, крепкая конструкция и использование минимального количества компонентов дают высокую надежность и большие интервалы между сервисным обслуживанием.
Быстрый - Короткое время циклов
Благодаря уникальной системе контроля движения компании АББ, робот оптимизирует ускорения достигая минимально-возможное время рабочих циклов.
Точный - Постоянное качество деталей
Лучшие в своем классе: точность следования заданному пути и позиционная повторяемость ( 0.06 мм).
Мощный – Максимальное использование
Варианты грузоподъемности 5 -16 кг. Радиус дейстия 1.810 м.
Защищенный – Работа под воздействием тяжелых условий внешней среды
Классифицированный как IP 67, с возможностью мойка паром, с классом "чистой комнаты" - 100 и опцией “Foundry Plus”.
Универсальный – Легкая внедряемость в производство
Весь модельный ряд имеет возможность установки как на полу так и на потолке
Список используемой литературы.
1. Сварочные роботы. В. Геттерт, Г. Герден, X. Гюттнер и др.; Под ред.
Г. Гердена; Пер. с нем. Г. Н. Клебанова, Д. Г. Тесменицкого.— М.:
Машиностроение, 1988.—288 с: ил.
2.Банов М.Д., Казаков Ю.В., Козулин М.Г. - Сварка и резка материалов. М.-
2000
|
из
5.00
|
Обсуждение в статье: Online-программирование. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы