 |
Главная |


Задание для курсовой работы
|
из
5.00
|
а) Определить минимальные значения интервалов 0…t1, 0…t2,при которых обеспечивается заданное время выключения тиристоров.
б) При найденных значениях t1 и t2 определить:
Тпп-время переходного процесса при включении схемы;
fмакс-максимальную частоту работы схемы;
P(f=fmin), P(f=fmax)-активные мощности, потребляемые от источника питания Е на частоте fmin и fmax;
IН(f=fmin), IН(f=fmax)-действующие значения тока нагрузки на частоте fmin и fmax.
в) На одном рисунке построить графики зависимостей i(t), ua(t), v(t), x(t) при установившемся режиме и частоте f=fmax/2.
г) Дополнительное задание:
Исследование аварийных режимов
Промоделировать работу схемы в случае короткого замыкания нагрузки. Изобразить на графике временные диаграммы i(t),uс(t)
Оценить и описать изменения в работе схемы при плавном уменьшении емкости С.
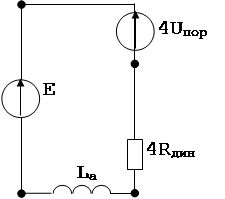
Составление математической модели
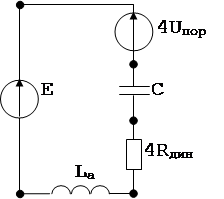
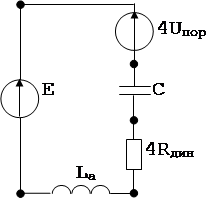
Тиристоры во включенном состоянии можно моделировать цепью из последовательно включенных источника напряжения Uпор и сопротивления Rдин
| ||||||||
 | ||||||||
 | ||||||||
 | ||||||||
В выключенном состоянии тиристор можно моделировать большим сопротивлением или разрывом.
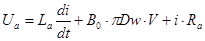
При составлении уравнений электрической части в качестве уравнения обмотки якоря вибратора следует использовать выражение:
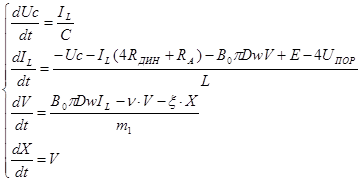
Математическая модель:
а) промежуток t1…t2:
 :
:
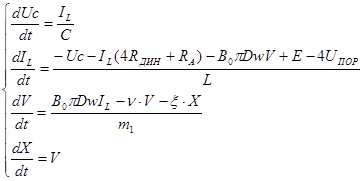
 б) промежуток t2…t3:
б) промежуток t2…t3: 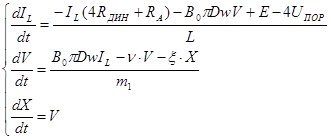
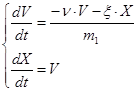
в) промежуток t3…t5(условие переключения IL=0)
г) промежуток t5…t6(IL=0;Uc=const):
Для отрицательной полуволны знаки указаны в скобках
Методика расчета искомых параметров и характеристик
Для решения систем дифференциальных уравнений математической модели применяли формулы численного интегрирования Рунге-Кутта четвертого порядка, которые имеют вид:
Xi+1=Xi+(K1+2K2+2K3+K4)/6,
Где:
К1=h×f[ti,Xi];
K2=h×f[ti+h/2, Xi+K1/2];
K3=h×f[ti+h/2, Xi+K2/2];
K4=h×f[ti+h, Xi+K3];
h-шаг интегрирования.
а) составляем программу, которая рассчитывает параметры IL, Uc, X, V на каждом шаге интегрирования. Задаем значения t1 и t2 при которых обеспечивается заданное время выключения тиристоров 50мкс (t3…t4; t5…t6).
б) при найденный значениях t1 и t2 определили:
время переходного процесса как время от начала включения схемы до установившихся значений параметров;
действующие значения тока нагрузки на частоте fmin и fmax находим по формуле прямоугольников, которая при достаточно малом шаге интегрирования дает требуемую точность вычислений
активные мощности, потребляемые от источника питания Е на частоте fmin и fmax, по формуле Р=Е×Iд
Алгоритм программы и программа расчета
|
из
5.00
|
Обсуждение в статье: Задание для курсовой работы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы