 |
Главная |


Форматы двоичных кодов на примере 4-разрядного ЦАП
|
из
5.00
|
| Код | Шкала | ±5 В | Смещен. двоичный код | Дополнительный код | Знак/модуль |
| 7 | FS+ –LSB | 4,375 | 1111 | 0111 | 0111 |
| 6 | FS+ –2LSB | 3,750 | 1110 | 0110 | 0110 |
| 5 | 5LSB | 3,125 | 1101 | 0101 | 0101 |
| 4 | 4LSB | 2,500 | 1100 | 0100 | 0100 |
| 3 | 3LSB | 1,875 | 1011 | 0011 | 0011 |
| 2 | 2LSB | 1,250 | 1010 | 0010 | 0010 |
| 1 | 1LSB | 0,625 | 1001 | 0001 | 0001 |
| 0 | 0 | 0,000 | 1000 | 0000 | 0000/1000 |
| –1 | –1LSB | –0,625 | 0111 | 1111 | 1001 |
| –2 | –2LSB | –1,250 | 0110 | 1110 | 1010 |
| –3 | –3LSB | –1,875 | 0101 | 1101 | 1011 |
| –4 | –4LSB | –2,500 | 0100 | 1100 | 1100 |
| –5 | –5LSB | –3,125 | 0011 | 1011 | 1101 |
| –6 | –6LSB | –3,750 | 0010 | 1010 | 1110 |
| –7 | FS-+LSB | –4,375 | 0001 | 1001 | 1111 |
| –8 | FS- | –5,000 | 0000 | 1000 |

|
| Рис. 3. Графики биполярного выходного напряжения для двух форматов управляющего кода |
Всё сказанное выше касалось цифро-аналоговых преобразователей, имеющих идеальную характеристику преобразования, для которой все значения сигнала на выходе строго соответствуют числу на входе. Реальные ЦАПы обладают погрешностями, наиболее существенные из которых описаны ниже.
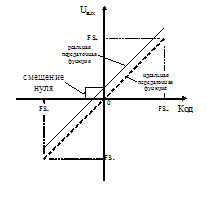
Ошибка смещения нуля и коэффициента преобразования. Этот вид ошибок наглядно продемонстрирован на рис. 4. Смещение нуля – напряжение на выходе ЦАПа, когда на вход подается код, соответствующий нулевому напряжению. Выражается в процентах от полной шкалы или LSB.
|
| Рис. 4. Ошибка смещения нуля и коэффициента преобразования для биполярного ЦАП |
Ошибка коэффициента преобразования определяет, насколько наклон характеристики преобразования отличается от заявленного значения. Может выражаться в процентах отклонения от идеального значения или в величине ошибки на полной шкале преобразователя в единицах LSB. Эти два вида погрешностей в тех случаях, когда ошибки превышают один квант, могут быть уменьшены, если «неточный ЦАП» предварительно прокалибровать более точным устройством.
Интегральная нелинейность.
Интегральную нелинейность измеряют как максимальное отклонение от прямой линии, соединяющей крайние точки шкалы. Иногда применяют менее жёсткий метод, проводя прямую так, чтобы отклонения стали знакопеременными и уменьшились («метод наилучшей прямой»). Интегральную нелинейность специфицируют либо в количестве квантов, либо в процентах от полной шкалы (рис. 5).
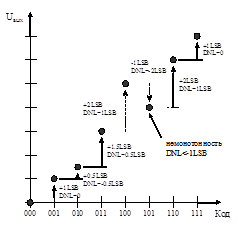
Дифференциальная нелинейность.
Если предыдущие нелинейности характеризовались в пределах всей шкалы преобразователя, то дифференциальная нелинейность – это локальная характеристика. В идеальном случае при изменении цифрового кода на 1 аналоговый сигнала также должен измениться на 1 LSB, однако реально имеет место неравномерность шагов. Дифференциальная нелинейность определяется как максимальное отклонение величины кванта от его среднего по шкале значения. Выражается в LSB (рис. 6).

|
| Рис. 5. Интегральная нелинейность биполярного ЦАП |
Динамические характери стики.
Наиболее важной динамической характеристикой цифро-аналоговых преобразователей является время установления, которое специфицируется как интервал от момента смены кода до момента установления выходного сигнала с ошибкой, равной половине LSB. Для измерения времени установления код изменяют от минимального до максимального значения и наоборот.
Как правило, в каждом ЦАПе имеют место в той или иной степени все ошибки. Их совокупное влияние приводит к некоторой результирующей погрешности, максимальная величина которой может быть вычислена как сумма отдельных ошибок. Такую результирующую погрешность называют абсолютной ошибкой.
|
| Рис. 6. Дифференциальная нелинейность ЦАП |
В реальных системах чаще всего абсолютная ошибка не столь существенна. Например, ошибка коэффициента преобразования может быть учтена в последующих элементах тракта управления. Более важными тогда могут оказаться нелинейности устройства.
Довольно часто при описании возможностей ЦАПа подменяют понятие «погрешность» термином «точность». Так, например, вместо того, чтобы сказать «погрешности 0,1 %» часто говорят, что точность 0,1 %. Хотя это и не совсем корректно, но весьма распространено.
Типы цифро-аналоговых преобразователей
Наиболее наглядно функционирование цифро-аналоговых преобразователей можно продемонстрировать на примере классических схем их построения: ЦАПа с весовыми резисторами, так называемого R‑2R‑преобразователя, и ЦАПа на основе широтно-импульсной модуляции (ЦАП-ШИМ).
ЦАП с весовыми резисторами.

|
| Рис. 7. ЦАП с весовыми резисторами |
Схема ЦАПа представлена на рис. 7. Она образована N‑резисторами (по количеству разрядов) и таким же количеством «перекидных» переключателей. Величина резистора каждого разряда отличается от соседнего в 2 раза. Если на цифровые входы всех разрядов поданы нули, то резисторы подключены к «земле». Поступление «1» на цифровой вход разряда подключает к резистору источник опорного напряжения. Нетрудно убедиться, что напряжение на выходе ЦАПа будет изменяться по двоичному закону в соответствии с поданным кодом.

|
| Рис. 8. ЦАП R-2R |
Подобная схема построения очень проста, однако применяется крайне редко и в самых неточных устройствах, так как требования к согласованию резисторов и погрешности, вносимые сопротивлением ключа, не позволяют достигать разрядности более 6 бит.
ЦАП R-2R
В значительной степени недостатки схемы с весовыми резисторами преодолены в ЦАПе R‑2R (рис. 8). Свойством данной лестничной схемы является то, что при добавлении нового звена ее импеданс не изменяется, а вклад предыдущих звеньев уменьшается в 2 раза. Подключая, в соответствии с двоичным кодом, резисторы к верхнему или нижнему потенциалу, получают требуемое напряжение.
Ввиду того, что в данной структуре используются всего два номинала резисторов, точность их согласования получается намного лучше. Найдены также и способы уменьшения влияния сопротивлений ключей. В результате этот тип преобразователя позволяет достигать 16‑разрядной точности, хотя основная область его применения 8–12‑разрядные устройства.
Следует отметить, что данный тип преобразователя широко применяется для построения быстродействующих ЦАПов со временем установления 10–50 нсек.
ЦАП–ШИМ
Если не требуется высокое быстродействие, зато необходима высокая точность, часто применяется преобразователь на основе широтно-импульсной модуляции (рис. 9). Этот тип ЦАПа содержит минимум аналоговых элементов и хорошо реализуется в технологиях цифровых интегральных схем, что и объясняет его широкое использование в медленных прецизионных системах (например, системы питания магнитов в ускорителях, томографах и т. п.).
Основой устройства является узел, преобразующий с помощью цифровых методов управляющий код в длительность импульса (генератор код‑скважность). Частота следования импульсов поддерживается с высокой стабильностью. Полученный широтно‑модулированный сигнал управляет коммутатором, подключающим к выходному фильтру на время, определяемое длительностью импульса, +Uref а в отсутствие импульса ‑Uref.

|
| Рис. 9. ЦАП на основе широтно‑импульсной модуляции |
Таким образом, среднее значение полученной импульсной последовательности может изменяться с очень малым квантом, за счёт чего и достигается высокая разрядность. Назначение фильтра низких частот на выходе – получение из последовательности импульсов среднего напряжения с приемлемым уровнем пульсаций.
Данная схема имеет высокую степень линейности преобразования и разрядность 16–20 бит. Основной недостаток – низкое быстродействие, задаваемое постоянной времени фильтра.
В заключение обратим внимание на важный элемент, присутствующий во всех схемах цифро-аналоговых преобразователей, – источник опорного напряжения, задающий максимальный выходной сигнал преобразователя. Именно это напряжение преобразуется во внутренних цепях устройства и в итоге оказывается на выходе. Поэтому качество работы ЦАПа определяется не только его внутренней структурой, но и качеством опорного источника (стабильностью, реакцией на изменение нагрузки и т. п.).
Контрольные вопросы
1. Вычислите вес младшего разряда в ЦАПе с весовыми резисторами для случая бесконечной нагрузки и нагрузки с сопротивлением r . Покажите результаты преподавателю.
2. Что такое смещения нуля и ошибка масштаба?
3. Что такое дифференциальная нелинейность?
4. Что такое нелинейность (интегральная нелинейность)?
5. Что такое время установления?
6. Отличается ли время установления ЦАП R-2R и ЦАП ШИМ?
Аналого-цифровые преобразователи
Аналого-цифровой преобразователь (АЦП) – устройство, преобразующее входной аналоговый сигнал в эквивалентный ему код.

|
| Рис. 10. Передаточная характеристика идеального АЦП и ошибка квантования |
Процедуру преобразования аналоговых сигналов в цифровые отсчёты можно разбить на два этапа. Сначала аналоговый сигнал подвергается процедуре дискретизации, в результате чего непрерывная функция заменяется последовательностью мгновенных значений сигнала, полученных в равноотстоящие моменты времени. Затем производится квантование этих мгновенных значений по уровню. Результатом является последовательность кодов в заданные моменты времени. Для некоторых типов АЦП процедура дискретизации заменяется интегрированием в промежутках между равноотстоящими моментами времени. Тогда квантованию подвергаются не мгновенные выборки сигнала, а его средние значения и результатом являются коды средних значений, отнесённых к соответствующим моментам времени.
При аналого-цифровом преобразовании возникает погрешность преобразования, так как аналоговый сигнал, принимающий бесконечное множество значений, заменяется на цифровой, имеющий их конечное множество. В идеальном случае погрешность преобразования не превышает ±1/2 кванта (LSB). Передаточная характеристика идеального АЦП и ошибка квантования показаны на рис. 10. Ошибка квантования может рассматриваться как шум, вносимый при преобразовании. Известно, что среднеквадратичное значение этого специфического шума, названного шумом квантования, равно  .
.
Характеристики аналого-цифровых преобразователей
Аналого-цифровые преобразователи – более сложные устройства, чем ЦАПы, и для профессионалов – разработчиков средств автоматизации эти приборы снабжаются широким комплексом параметров. В данном разделе описываются всего несколько характеристик, применение которых в практической работе весьма эффективно и в большинстве случаев достаточно для уверенной ориентации в многообразии аналого-цифровой аппаратуры.
Первое, что следует уяснить, выбирая средство преобразования аналог – код, какому типу АЦП следует отдать предпочтение. Известно четыре типа аналого-цифровых преобразователей, принципиально отличающиеся по структурным решениям и принципам работы:
1. АЦП поразрядного уравновешивания.
2. «Считающие» АЦП.
3. Высокопроизводительные АЦП.
4. Σ∆‑АЦП.
Позже будут приведены сравнительные характеристики всех 4-х типов. Также для интересующихся студентов подробности архитектурных решений этих преобразователей, особенности их работы и применений приведены в приложении.
Далее обратимся к основным параметрам АЦП. Возможности АЦП во временной области определяются его производительностью или темпом постановки отсчётов (в англоязычной литературе – Sampling Rate). Производительность преобразователя – это количество отсчётов в секунду, обеспечиваемое им на выходе. Распространение получила англоязычная единица измерения, обозначаемая как kSPS, MSPS, GSPS (kilo-Samples per Second, Mega-Samples per Second, Giga-Samples per second). Величина, обратная производительности, задаёт интервал между отсчётами. Допустимая величина интервала между отсчётами (и производительность) определяется способами обработки и восстановления сигнала из произведённых аналого-цифровым преобразователем отсчётов. Чем сложнее алгоритм восстановления по дискретным отсчётам исходного сигнала, тем больше возможен интервал между ними.
Перейдём к характеристикам, позволяющим понять, насколько точно цифровые отсчёты АЦП соответствуют значениям сигнала. Если слово данных на выходе АЦП имеет n двоичных разрядов, то числовые отсчёты могут принимать значения от 0 до 2 n-1. Как отмечено выше, теоретический предел отличия значения сигнала и его цифрового эквивалента, т. е. ошибка ε, вызванная преобразованием, не превышает
ε  ,
,
где A – шкала преобразования, LSB – дискретность преобразования по амплитуде. Таким образом, разрядность АЦП отражает его потенциальную возможность с точки зрения погрешности преобразования и также относится к основным характеристикам. Чаще всего реальная достигаемая погрешность превышает теоретическое значение. Факторы, определяющие погрешность преобразования в код, будут рассмотрены ниже.
Очень часто отождествляют понятие разрядности и разрешающей способности АЦП. Действительно, для выходного кода, принимающего 2 n (0 ÷ 2n-1) значений, величина  может быть названа разрешающей способностью, однако для реальных измерений под разрешающей способностью правильнее понимать вносимый шум. Шум преобразователя может заметно превышать один квант. Для его оценки используют характеристику, называемую SNR ( S ignal to Noise Ratio ), определяя её как
может быть названа разрешающей способностью, однако для реальных измерений под разрешающей способностью правильнее понимать вносимый шум. Шум преобразователя может заметно превышать один квант. Для его оценки используют характеристику, называемую SNR ( S ignal to Noise Ratio ), определяя её как  , где Signal – это среднеквадратичное значение синусоиды с амплитудой, равной половине шкалы преобразователя
, где Signal – это среднеквадратичное значение синусоиды с амплитудой, равной половине шкалы преобразователя  , а Noise – среднеквадратичное значение шума (в некоторых случаях используют более жёсткую оценку, принимая за шум его величину от пика до пика).
, а Noise – среднеквадратичное значение шума (в некоторых случаях используют более жёсткую оценку, принимая за шум его величину от пика до пика).
Известна формула, позволяющая вычислить реальную, или, как её чаще называют, эффективную разрядность, если известно SNR:
 ,
,
где ENOB – Effective Number Of Bits – широко применяемая аббревиатура для обозначения эффективной разрядности, а SNR выражено в децибелах.
Таким образом, существенным фактором, описывающим погрешность преобразования в код, является эффективная разрядность. Эта комплексная характеристика отражает влияние сразу нескольких источников ошибок: шума квантования, дифференциальной нелинейности, шумов внутренних узлов тракта преобразования. Причём если известна зависимость эффективной разрядности от частоты, то это понятие учитывает и динамические погрешности.
Для описания возможностей АЦП важны ещё три параметра: сдвиг нуля, ошибка масштаба и нелинейность характеристики преобразования. По воему смыслу эти характеристики аналогичны обсуждавшимся выше при рассмотрении ЦАПов.

|
| Рис. 11. Дифференциальная нелинейность АЦП |
Описание динамических характеристик аналого-цифровых преобразователей часто выделяют в отдельный раздел. Для лучшего понимания функционирования АЦП также поступим и мы, хотя ещё раз следует подчеркнуть, что для практических целей такая комплексная характеристика, как эффективная разрядность и её частотная зависимость, оказывается более удобной и понятной, чем анализ нескольких отдельных динамических характеристик.
Выше упоминался такой важный параметр, как производительность, который в полной мере можно отнести к группе динамических параметров.
Далее следует упомянуть зависимость масштаба преобразования от частоты. Это эквивалент широко применяемой в линейных схемах амплитудно‑частотной характеристики. Частотная зависимость масштаба преобразования определяется как поведение в диапазоне рабочих частот АЦП амплитуды восстановленного из цифровых данных синусоидального сигнала.
Динамическая дифференциальная нелинейность также является существенной характеристикой. Остановимся на ней подробнее. Характеристика преобразования с различными значениями дифференциальной нелинейности показана на рис. 11. Приемлемым считается уровень статической нелинейности менее ±0,5 LSB. Как правило, при оцифровке быстроменяющихся сигналов неравномерность «ступенек» характеристики возрастает и дифференциальная нелинейность достигает предельного значения ±1 LSB, что приводит к пропуску кодов.

|
| Рис. 12. Влияние джиттера на результат измерения |
Апертурная дрожь является ещё одним параметром, определяющим качество преобразования быстроменяющихся сигналов. Апертурная дрожь, или Jitter – это дрожание момента взятия отсчёта. На рис. 12 показано, каким образом шум по времени приводит к шуму по амплитуде.
Два последних параметра – динамическая дифференциальная нелинейность и Jitter – являются определяющими для значения эффективной разрядности в полосе рабочих частот, так как именно они описывают два основных источника шума в преобразовании аналог – код.
Теперь, когда дано определение основным характеристикам АЦП, можно обратиться к сравнению 4-х известных типов АЦП. В табл. 2 представлены их основные свойства.
Подводя итог данному разделу, ещё раз подчеркнём, что для оценки адекватности средств аналого-цифрового преобразования решаемой задаче достаточно осознать следующее:
1. Правильно ли выбран тип (архитектура) АЦП?
2. Достаточно ли производительности АЦП для качественного восстановления сигнала по имеющимся отсчётам?
3. Удовлетворяет ли задаче ошибка кодирования, равная  ?
?
4. Какую ошибку вносит смещение нуля и надо ли её компенсировать при обработке?
5. Какова погрешность масштаба преобразования в полосе частот сигнала?
Контрольные вопросы
1. Как вычислить отношение сигнал шум (SNR) в дБ?
2. Что такое эффективная разрядность АЦП для переменного сигнала?
3. Докажите, что шум квантования идеального АЦП всегда равен .
Практические задания
1. Проверьте соединение кабелем точного 16-разрядного АЦП модуля NI-PXI-6251 с ЦАП, установленным в терминальном модуле. Напишите программу для измерения передаточной характеристики ЦАП. Программа должна выводить графики передаточной характеристики и аналоговых ошибок выходного сигнала ЦАПа. Определите ошибки нуля, масштаба, интегральную и дифференциальную нелинейности (для более наглядного определения дифференциальной нелинейности можно построить гистограмму).
2. Проверьте соединение кабелем точного 16-разрядного ЦАП модуля NI-PXI-6251 с АЦП, установленным в терминальном модуле. Напишите программу для измерения характеристики преобразования АЦП терминального модуля. Программа должна выводить графики передаточной характеристики и ошибок АЦП. Определите ошибки нуля, масштаба и интегральную нелинейность.
3*. Напишите программу, которая позволит измерить эффективную разрядность АЦП терминального модуля в статике. Определите значение эффективной разрядности.
Приложение
Аналого‑цифровые преобразователи
Работы по созданию аналого-цифровых преобразователей были начаты в 20-х годах прошлого века. Эти работы были инициированы необходимостью изготовления помехоустойчивых телефонных линий связи на дальние расстояния. Первое описанное и запатентованное аналого-цифровое устройство использовалось для 5-битового кодирования сигнала в факсимильном аппарате и было сделано на электромеханических элементах. Полностью электронный АЦП (до 50-х годов аналого-цифровые преобразователи носили аббревиатуру PCM – Pulse Code Modulators: импульсно-кодовые модуляторы) появился заметно позднее – в 1937 г.
Переход на аналого-цифровую аппаратуру в системах связи резко активизировался во время Второй мировой войны в связи с разработкой систем кодирования речи и секретной телефонией. Только две классические работы Найквиста и известный доклад Котельникова были опубликованы до 1939 г. [1,4,5]. В остальном на 1945–1955 гг. приходится пик изобретений в области теоретических основ, структурных решений и принципов построения аналого-цифровых преобразователей.
Правда, промышленная реализация большинства этих предложений стала возможна заметно позднее – с развитием элементной базы электроники и появлением полупроводников. К 1970 г. в основном были найдены и опробованы архитектуры всех известных сегодня типов АЦП, хотя их схемотехнические и технологические решения являются предметом постоянного усовершенствования.
Существуют четыре типа аналого-цифровых преобразователей, кардинально отличающиеся по принципам преобразования и архитектурным решениям: АЦП на основе метода поразрядного уравновешивания, «считающие» АЦП, высокопроизводительные АЦП и ΣΔ-преобразователи.
Аналого-цифровые преобразователи на основе метода поразрядного уравновешивания (другое название – АЦП последовательного приближения; SAR-ADC: Successive Approximation Register ADC) в течение десятилетий остаются основным и наиболее используемым преобразовательным устройством среди всех типов АЦП. Хорошо сбалансированный по таким трудно совместимым показателям, как разрядность/быстродействие, технологическая сложность/разрядность, потребляемая мощность/быстродействие, этот преобразователь почти всегда рассматривается первым кандидатом для использования в большинстве разработок.
|
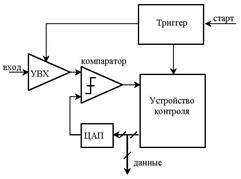
| Рис. П1. Структурная схема АЦП поразрядного уравновешивания |
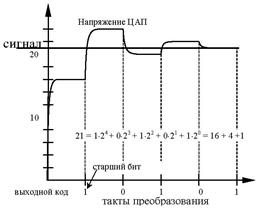
Этот принцип применительно к преобразовательным устройствам был предложен в 1946 г. Прототип устройства был сделан на лампах и всего лишь продемонстрировал правильность принципа. На рис. П1 показана структурная схема, поясняющая принцип работы аналого-цифрового преобразователя. Уравновешивание начинается с запоминания мгновенного значения сигнала (выборки сигнала; предположим, Х = 21) в устройстве выборки хранения (УВХ = SHA – Sample & Hold Amplifier). На первом такте компаратор сравнивает значение сигнала с напряжением ЦАПа, равным Eref/2, где Eref – шкала преобразователя. Если сигнал больше напряжения ЦАПа, то в старший разряд выходного регистра записывается 1, а напряжение ЦАПа так и остаётся равным Eref/2 (оставляем Х = 16). На следующем такте к нему добавляется Eref/4, происходит новое сравнение (с Х = 16 + 8) и компаратор определяет значение очередного разряда (= 0, оставляем Х = 16 + 0) и т. д., пока все разряды не будут определены. Понятно, что для N‑разрядного преобразования необходимо N тактов. На рис. П2 представлена временная диаграмма, откуда становится понятным, почему одно из названий алгоритма – последовательное приближение.
Параметры АЦП в первую очередь определяются свойствами цифро-аналогового преобразователя: быстродействием и точностью его работы, а также – качеством работы устройства выборки‑хранения и компаратора. В современных АЦП поразрядного уравновешивания, выполненных по технологии с переключаемыми конденсаторами, устройство выборки-хранения и ЦАП совмещены. За счёт высокого качества современных фотолитографических процессов удаётся выдержать двоичное соотношение разрядов ЦАПа, образованных конденсаторами, до значений 1/218. Поэтому разрядность современных АЦП поразрядного уравновешивания, выполненных по технологии с переключаемыми конденсаторами, достигает 18 при времени преобразования 1,2 мкс.
|
| Рис. П2. Временная диаграмма работы SAR ADC. В процессе преобразования напряжение ЦАПа всё точнее приближается к входному |
«Считающие» преобразователи обязательно содержат счётчик, а выходной код получается в результате подсчёта импульсов, частота или количество которых определяются входным сигналом.
Наиболее известным и распространённым представителем этого типа преобразователей является АЦП, использующий классический метод двухтактного интегрирования. Первые работы, в которых предлагался этот метод, относятся к 1957–60 гг. В СССР метод предложен в 1960 г. В. Г. Беляковым и Е. В. Добровым [2]. Так же, как метод поразрядного уравновешивания, является фундаментом для всех универсальных АЦП. Так, метод двухтактного интегрирования и его модификации являются основой для построения прецизионных медленных АЦП и цифровых вольтметров.
Структурная схема устройства показана на рис. П3, а диаграмма, поясняющая принцип действия, – ниже на этом же рисунке. Метод двухтактного интегрирования основан на преобразовании входного сигнала во временной интервал. Сначала входное напряжение подключается через ключ SW1 к входу интегратора на время Т. После окончания интегрирования входного сигнала к входу интегратора подключается опорное напряжение противоположной полярности по отношению к интегралу от входного сигнала. Компаратором фиксируется момент времени tХ, когда величина напряжения на выходе интегратора достигнет начального (нулевого) значения. Из условия равенства зарядов на емкости  , получим
, получим
 ,
,

|

|
| Рис. П3. Структурная схема АЦП двухтактного интегрирования и временная диаграмма его работы при постоянном входном напряжении |
Таким образом, результат интегрирования зависит только от величины опорного напряжения и времени его интегрирования и не зависит от величины номиналов резистора R и емкости С, что, собственно, и даёт возможность добиться высокой точности от такого преобразователя. Если входное напряжение постоянно (Vin = const), то, используя один и тот же тактовый генератор для организации интервала Т и подсчёта tx, можно исключить требование к стабильности частоты тактового генератора:
 →
→  , откуда
, откуда
 ,
,
где N – количество тактов на этапе интегрирования, Nx – измеренное значение, τ – длительность такта. Как видно, результат не зависит от τ.
Есть и ещё одно привлекательное качество АЦП двухтактного интегрирования – эффективное подавление высокочастотных и сетевых помех. Можно получить формулу, описывающую выходной сигнал интегратора при подаче на его вход синусоидального сигнала с амплитудой E 0 и частотой F:
 ,
,
где Т – время интегрирования.
Нетрудно заметить, что с ростом частоты сигнала амплитуда на выходе падает, как 1/ F, и, кроме того, при F = k / T (k = 1,2,…) обращается в 0. Таким образом, если время интегрирования сделать кратным периоду сети, то будет достигнуто отмеченное выше подавление сетевых помех.

|
| Рис. П4. Частотная зависимость амплитуды выходного сигнала интегратора с временем интегрирования Т |
Частотная зависимость амплитуды выходного сигнала интегратора показана на рис. П4. Именно этим обстоятельством объясняется широкое применение этих устройств в прецизионных системах питания электрофизических установок. Следует учесть также и относительно небольшие аппаратные затраты для построения интегрирующего АЦП, в результате чего аналоговая часть может быть сделана гальванически изолированной, «плавающей». Вследствие этого появляется возможность организации многоканальных, прецизионных измерительных систем с территориально разнесёнными источниками сигналов, что весьма актуально на крупных физических комплексах, а также при измерениях магнитных полей с помощью датчиков Холла.
Интегрирующие АЦП широко используются для измерения постоянных или медленно меняющихся напряжений и токов и являются основой прецизионных вольтметров. Кроме того, интегрирование входного сигнала в данном типе преобразователя даёт возможность применить его для измерения постоянных магнитных полей с помощью перемещаемых катушек.
Второй, хорошо известный преобразователь из группы «считающих АЦП» – это устройство, преобразующее напряжение в частоту (Voltage-to-Frequency Converter – VFC). Его работа также основана на интегрировании сигнала, вследствие чего он хорошо измеряет «зашумлённые» сигналы и может быть сделан достаточно точным. Наиболее известны два схемотехнических решения преобразования напряжения в частоту: управляемый током мультивибратор (current‑steering multivibrator) и преобразователь с уравновешиванием заряда (charge‑balance converter).

|
| Рис. П5. Блок-схема преобразователя с уравновешиванием заряда |
Более точным является второй тип преобразователя напряжения в частоту. Его блок-схема показана на рис. П5. Входной сигнал подаётся на интегратор и при достижении им порога, с конденсатора отбирается строго определённый заряд, определяемый генератором тока и длительностью его подключения. Входной сигнал интегрируется без пауз, таким образом, заряд не теряется, что даёт возможность увеличивать разрядность при удлинении времени счёта. В современных устройствах длительность подключения генератора тока задаётся цифровым одновибратором (precision one-shot), поэтому и точность, и разрешающую способность удаётся довести до уровня 18 бит.
Есть два важных качества преобразователей напряжение‑частота, которые крайне полезны в физических приложениях. На первое мы уже обращали внимание – возможность увеличения разрядности при увеличении времени счёта. Это свойство активно используется в магнитометрах (Fluxmeters), измеряющих сигналы с перемещаемых в магнитном поле катушек, поскольку позволяет достигать времени интегрирования/перемещения в десятки секунд.
И второе, важное в физических применениях, свойство – это лёгкость гальванической изоляции преобразователя напряжение‑частота. Действительно, потребляемая мощность всего несколько милливатт, малые габариты, хорошие точностные характеристики, передача выходного кода по одному проводу делают незаменимыми преобразователи напряжение‑частота в высоковольтных системах.
К высокопроизводительным АЦП с некоторой долей условности можно отнести преобразователи, производительность которых превышает 10 MSPS. Тем самым из данного типа исключаются АЦП поразрядного уравновешивания и будут рассматриваться более производительные архитектуры.
Однако, прежде чем приступить к рассмотрению высокопроизводительных схем, остановимся на свойствах и некоторых особенностях элемента, присутствующего во всех обсуждаемых типах АЦП. Этот элемент – компаратор, выставляющий на выходе значения логических «0» или «1» в зависимости от разности напряжений на входах. При рассмотрении предыдущих типов АЦП интуитивно предполагалось, что компаратор выполняет эту функцию мгновенно. Такой подход был вполне оправдан, поскольку в рассмотренных выше АЦП существенными являются быстродействие элементов, определяющих точность ЦАПов, ключей, усилителей и только в последнюю очередь компаратора. В высокопроизводительных схемах быстродействие компаратора должно учитываться, так как его динамические характеристики оказывают определяющее влияние на параметры преобразователя.
Вначале остановимся на простейших функциях и свойствах компаратора. Компаратор представляет собой усилитель с дифференциальным входом, большим коэффициентом усиления, позволяющим достигнуть высокой разрешающей способности, и формирователем выходных уровней. Если сигнал на входе ниже порога Vref, выход принимает значение «0», если выше – то «1», поэтому компаратор является аналого-цифровым преобразователем с разрядностью 1 бит.
Так как от компаратора требуется и большой коэффициент, и высокое быстродействие, к чему стремятся разработчики, схема становится неустойчивой в линейном режиме, т. е. при значениях сигнала, близких к порогу Vref или равных ему.
Первый способ преодоления проблемы – введение небольшой положительной обратной связи, т. е. гистерезиса. Этот приём широко распространён, однако он не позволяет достигнуть предельной, по сравнению с шумами, разрешающей способности, поскольку последняя не может превышать величины гистерезиса.

|
| Рис. П6. Структурная схема параллельного 3-битового АЦП |
Второй способ – снижение коэффициента усиления до уровня устойчивой работы и включение полной (100 %) положительной обратной связи через некоторое время после начала сравнения. Такой приём был предложен в 1972 г. сотрудником фирмы AMD Джеймсом Джайлсом и положен в основу широко известного компаратора АМ685 [3]. Именно таким образом выполняется большинство современных быстродействующих, точных компараторов, получивших название «компаратор-защёлка» (latched comparators), или стробируемый компаратор.
Такие компараторы применяются в одном из наиболее быстродействующих преобразователей – параллельных АЦП (Flash ADC). Рассмотрим структурную схему параллельного 3-битового АЦП, показанную на рис. П6.
Входной сигнал подаётся параллельно на все компараторы, а опорные напряжения разнесены друг от друга на величину младшего разряда с помощью лестничного делителя. Значения выходов компараторов образуют так называемый «термометрический» код, который затем преобразуется в двоичный. Для получения N‑разрядного кода необходимо 2N-1 ко
|
из
5.00
|
Обсуждение в статье: Форматы двоичных кодов на примере 4-разрядного ЦАП |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы