 |
Главная |


Алгебраические критерии устойчивости.
|
из
5.00
|
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
Тема 4. УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Диплом, это двадцать минут позора и кусок хлеба на всю жизнь. Временная функция многовариантна, характеристическое уравнение черт знает какого порядка, но система работает устойчиво. Стоит ли подводить под это дело еще и частотный анализ?
Владимир Кузьмин. Новосибирский геофизик Уральской школы. ХХ в.
Ты никогда не будешь достаточно знать, если не будешь знать больше чем достаточно.
Уильям Блейк.
Содержание
Введение.
1. Критерии устойчивости. Понятие устойчивости системы. Условие устойчивости САУ. Алгебраические критерии устойчивости. Критерий Рауса. Критерий Гурвица.
2. Частотные критерии устойчивости. Принцип аргумента. Критерий устойчивости Михайлова. Критерий устойчивости Найквиста.
3. Запас устойчивости систем. Понятие структурной устойчивости. Понятие запаса устойчивости. Анализ устойчивости по логарифмическим частотным характеристикам.
4. Точность систем. Статическая точность. Динамическая точность.
5. Качество систем. Показатели качества систем управления. Показатели качества переходного процесса. Последовательное корректирующее устройство. Параллельное корректирующее устройство. Метод Солодовникова. Программы анализа качества процессов управления.
6. Случайные процессы в системах. Модели случайных сигналов. Фильтрация помех. Фильтр Винера. Частотная характеристика фильтра.
Введение
Важнейшей задачей анализа динамических систем управления является решение вопроса об их устойчивости. Техническое понятие устойчивости систем автоматического управления отражает свойство технической системы не только стабильно работать в нормальных режимах, но и "не уходить вразнос" при отклонении всевозможных параметров системы от номинала и влиянии на систему дестабилизирующих воздействий, т. е. способности системе возвращаться к равновесному состоянию, из которого она выводится возмущающими или управляющими воздействиями. Устойчивость системы - техническое требование в ряду более сложных требований, связанных с показателями качества и точности САУ.
4.1 . КРИТЕРИИ УСТОЙЧИВОСТИ [1, 7, 11, 12].
Понятие устойчивости системы. Система находится в состоянии равновесия, если при отсутствии воздействия на систему возмущающих факторов ошибка регулирования (разность между заданным и фактическим состоянием системы) стремится к нулю. Под устойчивостью понимается способность динамической системы возвращаться в равновесное состояние после окончания действия возмущения, нарушившего это равновесие. Неустойчивая система после воздействия возмущения удаляется от равновесного состояния или начинает совершать вокруг него колебания с нарастающей амплитудой.
|
Рис. 4.1.1. |
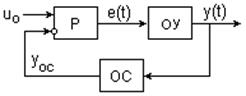
Возникновение неустойчивых (расходящихся) колебаний в системе можно проследить на примере следящей системы с обратной связью (рис. 4.1.1). Допустим, что в установившемся состоянии равновесия при опорном сигнале uo на регуляторе Р выходное состояние объекта управления ОУ равно yуст. Это состояние поддерживается сигналом рассогласования еуст, который формируется в регуляторе Р по разности опорного сигнала и сигнала обратной связи уос-уст, т.е. еуст = uo-уос-уст. В первый момент включения системы в силу инерционности обратной связи уос = 0, а, следовательно, e(t) >> еуст, что вызывает нарастание выходной величины y(t), которая будет стремиться к y(t) >> ууст по крайней мере, до тех пор, пока сигнал обратной связи не начнет уменьшать значение e(t). Однако значительно возросшая величина y(t) через ОС передается на вход регулятора системы и может настолько существенно уменьшить значение e(t), что это может привести к последующему снижению величины выходного сигнала до значений y(t) << ууст, т.е. к возникновению колебательного процесса относительно равновесного состояния. При неблагоприятном соотношении параметров системы колебательный процесс может быть незатухающим и даже расходящимся. Пример такого процесса в концертной акустике хорошо известен – свист из динамиков, если коэффициент обратной связи от динамиков на микрофоны на определенных частотах становится положительным.
Устойчивость линейной системы определяется не характером возмущения, а структурой самой системы. Говорят, что система устойчива "в малом", если определен факт наличия устойчивости, но не определены ее границы. Система устойчива "в большом", когда определены границы устойчивости и то, что реальные отклонения не выходят за эти границы. Соответственно, и задача исследования систем на устойчивость может быть поставлена двояко:
1) устойчива ли система при заданном значении ее параметров;
2) в каких диапазонах можно изменять параметры системы, не нарушая ее устойчивости.
Вторая задача исследования имеет место при наладке и эксплуатации систем автоматического управления.
В соответствии с классическим методом решение дифференциального уравнения для системы ищется в виде:
y(t) = усв(t) + увын(t). (4.1.1)
Здесь усв(t) – свободная составляющая, общее решение однородного дифференциального уравнения с нулевой правой частью:
a0y(n) + a1y(n-1) + ... + an-1y’ + any = 0,
т.е. когда все внешние воздействия сняты, и состояние системы определяются лишь собственной структурой.
Функция увын(t) представляет собой частное решение неоднородного дифференциального уравнения, под которым понимается уравнение с ненулевой правой частью. Физически это означает, что к системе приложено внешнее воздействие u(t). Поэтому вторая составляющая общего решения называется вынужденной. Она определяет вынужденный установившийся режим работы системы при наличии на входе определенного воздействия u(t) или f(t) после окончания переходного процесса.
|
Рис. 4.1.2. |

Можно провести аналогию между САУ и пружиной, колебания которой описываются аналогичным дифференциальным уравнением (рис. 4.1.2). Оттянем пружину, а затем отпустим, предоставив ее самой себе. Пружина будет колебаться в соответствии со свободной составляющей решения уравнения, характер колебаний будет определяться только структурой самой пружины. Если подвесить к пружине груз, то на свободные колебания наложится внешняя сила Р. После затухания колебаний, описываемых только свободной составляющей общего решения, система перейдет в новый установившийся режим, характеризуемый вынужденной составляющей увын = y(t®∞). Если внешнее воздействие само будет изменяться по синусоидальному закону P = Po sin(wt+j), то после затухания переходного процесса система будет совершать вынужденные колебания с той же частотой, что и вынуждающая сила, то есть увын = ymax sin(wt+j).
Только устойчивая система является работоспособной. Основы строгой теории устойчивости динамических систем были разработаны акад. А. М. Ляпуновым в работе «Общая задача об устойчивости движения» (1892 г.). Понятия об устойчивости, вытекающие из этой работы, заключаются в следующем.
Если система описывается линейным дифференциальным уравнением, то ее устойчивость не зависит от величины возмущения. Линейная система, устойчивая при малых возмущениях, будет устойчива и при больших. Нелинейные системы могут быть устойчивы при малых возмущениях и неустойчивы при больших.
 Наглядное представление о системах, устойчивых при малых и неустойчивых при больших возмущениях, дает поведение шара во впадине на рисунке слева. При малых воздействиях на шар и его малых отклонениях не выше края впадины шар возвращается в исходное положение и система шар - поверхность устойчива. При больших воздействиях с отклонением за край впадины шар не возвращается в исходное положение - система неустойчива. Поэтому устойчивость систем исследуется отдельно для случая малых и больших возмущений.
Наглядное представление о системах, устойчивых при малых и неустойчивых при больших возмущениях, дает поведение шара во впадине на рисунке слева. При малых воздействиях на шар и его малых отклонениях не выше края впадины шар возвращается в исходное положение и система шар - поверхность устойчива. При больших воздействиях с отклонением за край впадины шар не возвращается в исходное положение - система неустойчива. Поэтому устойчивость систем исследуется отдельно для случая малых и больших возмущений.
Проблема устойчивости обычно возникает в замкнутых системах из-за влияния обратной связи. Поэтому в дальнейшем устойчивость исследуется на примерах замкнутых систем, хотя методы исследования устойчивости универсальны.
Условие устойчивости САУ. Применительно к сигналам в САУ частное решение для вынужденной составляющей обычно имеет простой вид, не влияющий на устойчивость. Вопрос устойчивости сводится к выяснению устойчивости свободного движения системы и требует анализа характера решения уравнения свободного движения, составленного относительно отклонения выходной величины y(t)от установившегося состояния.
Как известно, передаточная функция любой линейной динамической системы может быть приведена к виду:
W(p) = K(p)/H(p) =
= [b0pm+b1pm-1+…+bm-1p+bm] / [a0pn+a1pn-1+…+ an-1p+an], (4.1.2)
где a и b - постоянные коэффициенты, которые представляют собой вещественные числа и выражаются через конкретные физические параметры элементов системы. Полином К(р) может не содержать членов с оператором р и представлять собой произведение коэффициентов передачи звеньев, образующих систему.
Важнейшим свойством выражения (4.1.2) является условие n≥m, т. е. порядок полинома Н(р) знаменателя передаточной функции не ниже порядка полинома К(р) ее числителя. Это условие вытекает из физических свойств звеньев реальных динамических систем.
Из выражения (4.1.2) передаточной функции системы можно получить дифференциальное уравнение системы в целом, как в разомкнутом, так и в замкнутом состоянии.
Уравнения разомкнутых систем. Если выражение (4.1.2) является передаточной функцией разомкнутой системы, то выражение
u(р) К(р) = y(p) Н(р), (4.1.3)
будет представлять собой операторное уравнение разомкнутой системы (уравнение в изображениях переменных). Положив в (4.1.3) u(p)=0, получим операторное уравнение свободного движения в разомкнутой линейной динамической системе:
y(p) H(p) = 0. (4.1.4)
Переходя в (4.1.4) к оригиналам, т. е. от операторного уравнения к дифференциальному, и обозначив y(t) = х, получаем дифференциальное уравнение свободного движения в разомкнутой линейной динамической системе
a0dnx/dtn + a1 dn-1x/dtn-1 +…+ an-1 dx/dt +an = 0 (4.1.5)
Характеристическим уравнением, соответствующим дифференциальному уравнению (4.1.5), будет
Н(р) = 0, a0pn+a1pn-1+…+ an-1p+an = 0. (4.1.6)
Отсюда следует: приравненный нулю знаменатель передаточной функции разомкнутой линейной динамической системы является характеристическим уравнением, соответствующим дифференциальному уравнению разомкнутой системы. В связи с этим многочлен Н(р)=0 называется характеристическим оператором системы.
Уравнение замкнутых систем. Пусть (4.1.2) является передаточной функцией разомкнутой системы. Для замкнутой системы в силу отрицательной главной обратной связи имеем u(t) = -y(t), и (4.1.3) принимает вид -К(р) y(р) = Н(р) y(р). Операторное уравнение свободного движения в замкнутой системе:
[К(р)+Н(р)]y(р) = 0, (4.1.7)
где К(р), Н(р) - соответственно числитель и знаменатель передаточной функции разомкнутой системы; y(р) — изображение координаты системы в точке ее замыкания.
На основании (4.1.7) можно записать характеристическое уравнение, соответствующее дифференциальному уравнению свободного движения в замкнутой системе
К(р) + Н(р) = 0. (4.1.8)
C учетом того, что Woc(p) = 1, передаточная функция замкнутой системы:
Wзс(p) = W(p)/[1 + W(p)], (4.1.9)
где W(p)=K(p)/H(p) - передаточная функция разомкнутой системы. Или:
Wзс(p) = K(p)/[K(p) + H(p)] = K(p)/Hзс(p). (4.1.9')
На этом основании характеристическое уравнение замкнутой системы можно записать в виде
Hзс(р) = K(p) + H(p) = 0. (4.1.10)
Таким образом, приравненная нулю сумма полинома числителя и полинома знаменателя передаточной функции разомкнутой системы или приравненный нулю полином знаменателя передаточной функции замкнутой системы являются характеристическим уравнением, соответствующим дифференциальному уравнению свободного движения в замкнутой системе.
Корни характеристических уравнений систем могут быть либо вещественными, либо попарно комплексно сопряженными. Решение однородного уравнения выражается через корни характеристического уравнения и коэффициенты перед экспонентами, которые могут быть вычислены через вычеты:
усв(t) =  Сn exp(pnt). (4.1.11)
Сn exp(pnt). (4.1.11)
Условие устойчивости систем по Ляпунову формулируется так: в устойчивой системе свободная составляющая решения уравнения динамики, записанного в отклонениях, должна стремиться к нулю, то есть затухать.
|
Рис. 4.1.3. |
Из формулы (4.1.11) нетрудно вывести условие устойчивости линейных динамических систем: линейная система будет устойчива, если все вещественные корни и все вещественные части комплексных корней характеристического уравнения, соответствующего исходному дифференциальному уравнению свободного движения системы, будут отрицательными, что дает затухающие по экспоненте решения. Если имеются чисто мнимые корни, то в переходном процессе будут гармонические незатухающие компоненты.
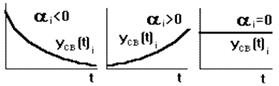
Каждому отрицательному вещественному корню ai соответствует экспоненциально затухающая во времени составляющая усв(t)i, каждому положительному - экспоненциально расходящаяся, каждому нулевому корню соответствует усв(t)i = const (рис. 4.1.3).
|
Рис. 4.1.4. |
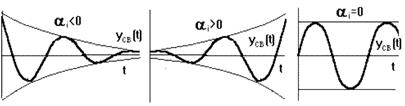
Пара комплексно сопряженных корней с отрицательной вещественной частью определяет затухающие колебания с частотой wi, при положительной вещественной части - расходящиеся колебания, при нулевой - незатухающие (рис. 4.1.4).
|
Рис . 4.1.5. |
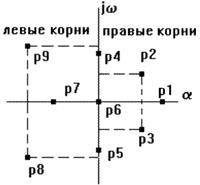
Исходя из расположения на комплексной плоскости, корни с отрицательными вещественными частями называются левыми, с положительными - правыми (рис. 4.1.5). Поэтому условие устойчивости линейной САУ можно сформулировать следующим образом: для того, чтобы система была устойчива, необходимо и достаточно, чтобы все корни ее характеристического уравнения были левыми. Если хотя бы один корень правый, то система неустойчива. Если один из корней равен нулю, а остальные левые, то система находится на границе апериодической устойчивости. Если равны нулю вещественные части одной или нескольких пар комплексно сопряженных корней, то система находится на границе колебательной устойчивости.
Таким образом, исследование устойчивости системы сводится к определению знаков вещественных частей корней характеристического уравнения системы. Но решение уравнений четвертой и более высоких степеней может встречать затруднения. Поэтому применяются косвенные методы анализа устойчивости без определения корней характеристического уравнения, по определенным критериям устойчивости.
Проверку факта отрицательности вещественных частей корней можно выполнять тремя способами:
- вычислив корни непосредственно, с использованием готовых программ;
- связав расположение корней с коэффициентами характеристического уравнения для последующего аналитического исследования;
- судить об устойчивости по частотным характеристикам системы.
Первые два способа называют алгебраическими, последний - частотным. В инженерной практике необходимо иметь эффективные и удобные правила проверки устойчивости. Однако сам по себе критерий устойчивости не обязан быть необходимым и достаточным условием устойчивости системы.
Алгебраические критерии устойчивости.
Необходимое условие устойчивости. Если все корни характеристического уравнения левые (вещественные части всех корней отрицательны), то все коэффициенты уравнения имеют один знак, т.е. все значения an либо больше нуля, либо меньше нуля одновременно. Равенство коэффициентов нулю не допускается (граница устойчивости). Доказательство очень простое и заключается в разложении полинома на простейшие множители. Они могут быть вещественные или комплексно - сопряжённые. Объединим последние в пары и перемножим, при этом в скобках нет ни одного отрицательного числа, а, следовательно, знак всех членов характеристического уравнения будет определяться знаком коэффициента a0. В дальнейшем будем рассматривать только уравнения, где a0 > 0. В противном случае уравнение умножается на -1.
Рассмотренное условие при порядке системы больше 2 является необходимым, но не достаточным условием, и применяется для отсеивания заведомо неустойчивых систем. Необходимые и достаточные условия дают алгебраические критерии Рауса и Гурвица.
Критерий Рауса. Используется в виде алгоритма, по которому заполняется специальная таблица с использованием коэффициентов характеристического уравнения:
1) в первой строке записываются коэффициенты уравнения с четными индексами в порядке их возрастания;
2) во второй строке – аналогично коэффициенты с нечетными индексами;
3) остальные элементы таблицы определяется по формуле: ck,i = ck+1,i-2 - ri ck+1, i-1, где ri = c1,i-2/c1,i-1, i ≥3 - номер строки, k - номер столбца.
4) Число строк таблицы на единицу больше порядка характеристического уравнения.
| ri | i\k | 1 | 2 | 3 | 4 |
| - | 1 | c11 = a0 | c21 = a2 | c31 = a4 | ... |
| - | 2 | c12 = a1 | c22 = a3 | c32 = a5 | ... |
| r3 = c11/c12 | 3 | c13 = c21-r3 c22 | c23 = c31-r3 c32 | c33 = c41-r3 c42 | ... |
| r4 = c12/c13 | 4 | c14 = c22-r4 c23 | c24 = c32-r4 c33 | c34 = c42-r4 c43 | ... |
| ... | ... | ... | ... | ... | ... |
Чтобы система была устойчива, необходимо и достаточно, чтобы коэффициенты первого столбца таблицы Рауса c11, c12, c13,... были положительными. Если это не выполняется, то система неустойчива, а количество правых корней равно числу перемен знака в первом столбце.
Достоинство - критерий прост в использовании независимо от порядка характеристического уравнения. Он удобен для использования на ЭВМ. Его недостаток - малая наглядность, трудно судить о степени устойчивости системы, насколько далеко отстоит она от границы устойчивости.
|
Рис. 4.1.6. |
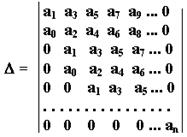
Критерий Гурвица. Гурвиц предложил другой критерий устойчивости. Из коэффициентов характеристического уравнения строится определитель Гурвица D по алгоритму:
1) по главной диагонали слева направо выставляются все коэффициенты характеристического уравнения от a1 до an;
2) от каждого элемента диагонали вверх и вниз достраиваются столбцы определителя так, чтобы индексы убывали сверху вниз;
3) на место коэффициентов с индексами меньше нуля или больше n ставятся нули.
Чтобы система была устойчива, необходимо и достаточно, чтобы все коэффициенты характеристического уравнения и все n главных диагональных миноров матрицы Гурвица были положительны. Число определителей Гурвица равно порядку характеристического уравнения п.
Критерий Гурвица применяют при n ≤ 5. При больших порядках возрастает число определителей, и процесс становится трудоемким. Недостаток критерия Гурвица - малая наглядность. Достоинство - удобен для реализации на ЭВМ.
4.2 . ЧАСТОТНЫЕ КРИТЕРИИ УСТОЙЧИВОСТИ [7, 8, 11].
Частотные методы исследования устойчивости основаны на связи расположения корней характеристического полинома (обозначим его функцией D(р) для любого типа систем) с годографом этого полинома на комплексной плоскости, т.е. с графиком комплексной функции D(jw) при изменении w от 0 до ∞. Это графоаналитические методы, позволяющие по виду частотных характеристик систем судить об их устойчивости. Их достоинство - в простой геометрической интерпретации, наглядности и в отсутствии ограничений на порядок дифференциального уравнения.
Принцип аргумента. Запишем характеристический полином в виде
D(p) = a0 (p-p1) (p-p2)… (p-pn) = 0,
Его корни: pi = ai + jwi = |pi| exp(j arg(pi)), где arg(pi) = arctg(wi/ai) + kp, |pi| - значения модулей корней.
|
Рис. 4.2.1. |
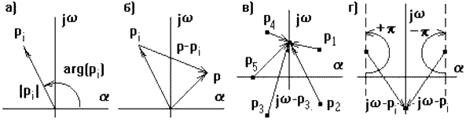
Каждый корень можно изобразить вектором на комплексной плоскости (рис. 4.2.1а), тогда разность p - pi изобразится разностью векторов (рис. 4.2.1б), где p - любое число.
Если изменять значение p произвольным образом, то конец вектора p - pi будет перемещаться по комплексной плоскости, а его начало будет оставаться неподвижным, так как pi - это конкретное неизменное значение. В частном случае, если на вход системы подавать гармонические колебания с различной частотой w, то p = jw, а характеристический полином принимает вид:
D(jw) = a0 (jw - p1) (jw - p2) ... (jw - pn).
При этом концы векторов jw - pi будут находиться на мнимой оси (рис. 4.2.1в). Если менять w от -∞ до +∞, то каждый вектор jw - pi будет поворачиваться относительно своего начала pi на угол +p для левых и -p для правых корней (рис. 4.2.1г).
Характеристический полином можно представить в виде
D(jw) = |D(jw)| exp(j arg(D(jw))),
где |D(jw)| = a0 |jw-p1| |jw-p2| ... |jw-pn|, arg(D(jw)) = arg(jw-p1) + arg(jw-p2) + ... + arg(jw-pn).
Пусть из n корней m - правые, а n-m - левые, тогда угол поворота вектора D(jw) при изменении w от -∞ до ∞ равен
 = (n-m)p - mp,
= (n-m)p - mp,
или при изменении w от 0 до +∞:
 = (n - 2m) (p/2). (4.2.1)
= (n - 2m) (p/2). (4.2.1)
Отсюда вытекает правило: изменение аргумента вектора D при изменении частоты от -∞ до +∞ равно разности между числом левых и правых корней уравнения D(p) = 0, умноженному на p, а при изменении частоты от 0 до +∞ эта разность умножается на p/2.
Это и есть принцип аргумента. Он положен в основе всех частотных критериев устойчивости. Мы рассмотрим два наиболее распространенных критерия: критерий Михайлова и критерий Найквиста.
Критерий устойчивости Михайлова. Так как для устойчивой системы число правых корней m = 0, то угол поворота вектора D(jw) составит
= np/2. (4.2.2)
|
Рис. 4.2.2. |
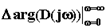
Система будет устойчива, если вектор D(jw) при изменении частоты от 0 до +∞ повернется на угол np/2. При этом конец вектора опишет кривую, называемую годографом Михайлова. Для построения годографа выражение (4.1.6) записывается с заменой p на jw в форме:
a0pn+a1pn-1+…+ an-1p+an = D(jw ) = P(w) + jQ(w),
где P(w) - вещественная часть, как сумма всех членов характеристического уравнения, содержащих j в четных степенях, Q - мнимая часть выражения. Годограф начинается на положительной полуоси при D(0) = an, и, при изменении частоты от 0 до ∞, последовательно проходит против часовой стрелки n квадрантов комплексной плоскости, с уходом в бесконечность в n-ом квадранте (рис. 4.2.2а).
Если это правило нарушается (например, число проходимых кривой квадрантов не равно n, или нарушается последовательность прохождения квадрантов (рис. 4.2.2б)), то такая система неустойчива - это и есть необходимое и достаточное условие устойчивости по критерию Михайлова.
Критерий удобен своей наглядностью и используется, если известно уравнение замкнутой системы. Если кривая проходит вблизи начала координат, то система находится вблизи границы устойчивости и наоборот.
|
Рис. 4.2.3. |
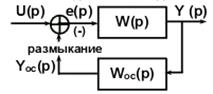
Критерий устойчивости Найквиста. Этот критерий основан на связи свойства устойчивости замкнутой системы с формой АФЧХ разомкнутой устойчивой системы. Разомкнутой системой являются все последовательно соединенные блоки от входа системы до точки замыкания обратной связи (рис. 4.2.3). Исследование разомкнутой системы проще, чем замкнутой, и его можно производить экспериментально.
Передаточная функция Wpc разомкнутой системы:
Wpс(jw) = Kpc(jw)/Hpc(jw),
с углом поворота фазы в соответствии с выражением (4.2.2):
D arg Hрс(jw) = np/2, 0 ≤ w ≤ ∞. (4.2.3)
АФЧХ замкнутой системы описывается выражением:
Wзс(jw)= Wpc(jw) /[1+ Wpc(jw)]. (4.2.4)
Обозначим знаменатель этого выражения через W1(jw):
W1(jw)=1+Wpc(jw)=1+Kpc(jw)/Hpc(jw)=H(jw)/Hpc(jw), (4.2.5)
где H(jw) = Kpc(jw) + Hpc(jw), характеристический полином замкнутой системы при р=jw.
В соответствии со свойствами передаточных функций порядок полинома Н(р) не превышает порядка полинома Hpc(p), т.к. H(p)=Kpc(p)+Hpc(p), а порядок полинома Kpc(p) меньше порядка полинома Hpc(p). Поэтому критерий Михайлова для замкнутой системы соответствует выражению:
D arg H(jw) = (n - 2m) (p/2), 0 ≤ w ≤ ∞. (4.2.6)
где m - число правых корней системы, имеющей в замкнутом состоянии характеристический полином Н(р)=0.
Из (4.2.5) следует:
D arg W1(jw) = D arg H(jw) - D arg Hpc(jw).
C учетом (4.2.3):
D arg W1(jw) = (n - 2m) (p/2) - np/2 = -mp. (4.2.7)
В устойчивой замкнутой системе правых корней в характеристическом уравнении нет, т. е. m=0, а, следовательно, условием устойчивости замкнутой системы будет:
D arg W1(jw) = 0. (4.2.8)
Условие (4.2.8) выполняется только тогда, когда кривая W1(jw) при изменении частоты от 0 до ∞ не охватывает начала координат комплексной плоскости. Действительно, только в этом случае результирующий поворот вектора W1(jw) при изменении w от 0 до ∞ будет равен нулю, так как возрастание угла j(w), обусловленное движением вектора W1(jw) в положительном направлении (против часовой стрелки), будет компенсироваться таким же убыванием j(w), обусловленным движением вектора W1(jw) в отрицательном направлении (по часовой стрелке).
Как видно из (4.2.5), переход на комплексной плоскости от годографа вектора W1(jw) к годографу вектора АФЧХ разомкнутой системы Wpс(jw) осуществляется сдвигом кривой W1(jw) влево на -1, так как Wpc(jw) = W1(jw) -1. С учетом этой операции, получаем следующую формулировку амплитудно-фазового критерия устойчивости Найквиста: линейная динамическая система, устойчивая в разомкнутом состоянии, устойчива и в замкнутом состоянии, если АФЧХ разомкнутой системы Wpс(jw) при изменении частоты от 0 до ∞ не охватывает на комплексной плоскости точку с координатами (-1; j0) (рис. 4.2.4, годограф 2).
|
Рис. 4.2.4. |
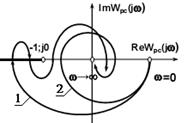
Более общая формулировка критерия Найквиста относится к системам, имеющим так называемую АФЧХ второго рода (рис. 4.2.4, годограф 1), когда Wpс(jw) пересекает (неограниченное количество раз) вещественную ось левее точки Re Wpc(w) = -1. Будем считать положительным переход годографа через вещественную ось, если он совершается сверху вниз, и отрицательным, если он совершается снизу вверх. Для таких годографов критерий Найквиста формулируется в следующем виде: линейная динамическая система, устойчивая в разомкнутом состоянии, устойчива и в замкнутом состоянии, если при изменении частоты от 0 до +∞ разность между числом положительных переходов годографа АФЧХ разомкнутой системы через участок вещественной оси (-1; -∞) и числом отрицательных переходов равна нулю. Из этого условия видно, что система, устойчивая в разомкнутом состоянии и имеющая АФЧХ в форме кривой 1 на рис. 4.2.4, устойчива и в замкнутом состоянии.
|
Рис. 4.2.5. |
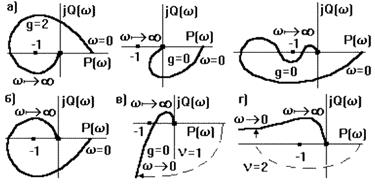
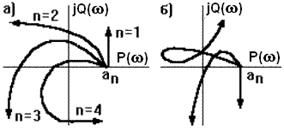
На рис. 4.2.5а приведены АФЧХ разомкнутых САУ, устойчивых в замкнутом состоянии, на рис. 4.2.5б - замкнутая САУ неустойчива.
На рис. 4.2.5в и 4.2.5г показаны АФЧХ разомкнутых астатических САУ, соответственно устойчивых и неустойчивых в замкнутом состоянии. Их особенность в том, что АФЧХ при w ® 0 уходит в бесконечность. В этом случае при использовании критерия Найквиста ее мысленно замыкают на вещественную ось по дуге окружности бесконечно большого радиуса.
Критерий Найквиста нагляден. Он позволяет не только выявить, устойчива ли система, но и, в случае, если она неустойчива, наметить меры по достижению устойчивости.
4.3 . ЗАПАС УСТОЙЧИВОСТИ СИСТЕМ [7].
Понятие структурной устойчивости. Астатическая система может быть неустойчивой по двум причинам: неподходящий состав динамических звеньев и неподходящие значения параметров звеньев.
Системы, неустойчивые по первой причине, называются структурно неустойчивыми. Это означает, что изменением параметров системы нельзя добиться ее устойчивости, нужно менять ее структуру.
|
Рис. 4.3.1. |
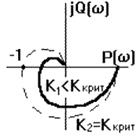
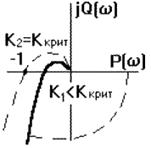
Например, если система состоит из любого количества инерционных и колебательных звеньев, она имеет вид, показанный на рис. 4.3.1. При увеличении коэффициента усиления системы K каждая точка ее АФЧХ удаляется от начала координат, пока при некотором значении Ккрит АФЧХ не пересечет точку (-1, j0). При дальнейшем увеличении K, система будет неустойчива. И, наоборот, при уменьшении K такую систему, в принципе, можно сделать устойчивой, поэтому ее называют структурно устойчивой.
Если система астатическая, то n - порядок астатизма, равен количеству последовательно включенных интеграторов. При ее размыкании характеристическое уравнение системы имеет нулевые корни, поэтому при w®∞ АФЧХ стремится к ∞ (рис. 4.2.5в и 4.2.5г). Например, пусть Wр(p) = K/(p(Tp+1)), тогда АФЧХ разомкнутой системы:
W(jw) =  = P(w) + jQ(w).
= P(w) + jQ(w).
|
Рис. 4.3.2. |
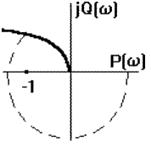
Так как порядок знаменателя больше порядка числителя, то при w®0 имеем P(w)®∞, Q(w)® -j∞. Подобная АФЧХ представлена на рис. 4.3.2. Так как АФЧХ терпит разрыв, трудно сказать, охватывает ли она точку (-1,j0). В этом случае пользуются следующим приемом: если АФЧХ терпит разрыв, уходя в бесконечность при w®0, ее дополняют мысленно полуокружностью бесконечного радиуса, начинающейся на положительной вещественной полуоси и продолжающейся до АФЧХ в отрицательном направлении. После этого можно применить критерий Найквиста. Как видно из рисунка, система, имеющая одно интегрирующее звено, является структурно устойчивой.
|
Рис. 4.3.3. |
Если система имеет два интегрирующих звена (порядок астатизма 2), ее АФЧХ уходит в бесконечность во втором квадранте (рис. 4.3.3). Например, пусть Wр(p) = K/(p2 (Tp+1)), тогда АФЧХ системы:
W(jw) =  = P(w) + jQ(w).
= P(w) + jQ(w).
При w®0 имеем P(w)® -∞, Q(w)® j∞. Такая система не будет устойчива ни при каких значениях параметров, то есть она структурно неустойчива.
Структурно неустойчивую систему можно сделать устойчивой, включив в нее корректирующие звенья (например, дифференцирующие) или изменив структуру системы, например, с помощью местных обратных связей.
Понятие запаса устойчивости. В условиях эксплуатации параметры системы по тем или иным причинам могут меняться в определенных пределах (старение, температурные колебания и т.п.). Эти колебания параметров могут привести к потере устойчивости системы, если она работает вблизи границы устойчивости. Поэтому стремятся спроектировать систему так, чтобы она работала вдали от границы устойчивости. Степень этого удаления называют запасом устойчивости.
|
Рис. 4.3.4. |
Согласно критерию Найквиста, чем дальше АФЧХ от критической точки (-1, j0), тем больше запас устойчивости. Различают запасы устойчивости по модулю и по фазе.
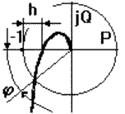
Запас устойчивости по модулю характеризует удаление годографа АФЧХ разомкнутой системы от критической точки в направлении вещественной оси и определяется расстоянием h от критической точки до точки пересечения годографом оси абсцисс (рис. 4.3.4).
Запас устойчивости по фазе характеризует удаление годографа от критической точки по дуге окружности единичного радиуса и определяется углом j между отрицательным направлением вещественной полуоси и лучом, проведенным из начала координат в точку пересечения годографа с единичной окружностью.
|
Рис. 4.3.5. |
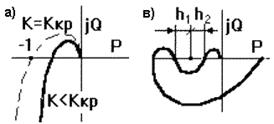
Как уже отмечалось, с ростом коэффициента передачи разомкнутой системы растет модуль каждой точки АФЧХ и при некотором значении K = Kкр АФЧХ пройдет через критическую точку (рис. 4.3.5а) и попадет на границу устойчивости, а при K > Kкр замкнутая система станет неустойчива. Однако в случае АФЧХ типа 1 (рис. 4.2.4) (получаются из-за наличия внутренних обратных связей) не только увеличение, но и уменьшение K может привести к потере устойчивости замкнутых систем (рис. 4.3.5в). В этом случае запас устойчивости определяется двумя отрезками h1 и h2, заключенными между критической точкой и АФЧХ.
|
Рис. 4.3.6. |
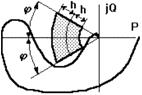
Обычно при создании системы задаются требуемыми запасами устойчивости h и j, за пределы которых она выходить не должна. Эти пределы выставляются в виде сектора, вычерчиваемого вокруг критической точки, в который АФЧХ разомкнутой системы входить не должна (рис. 4.3.6).
|
Рис. 4.3.7. |
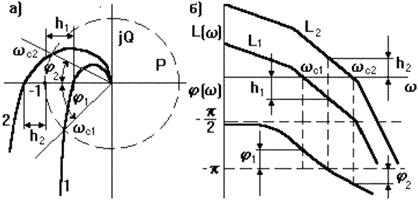
Анализ устойчивости по ЛЧХ. Оценку устойчивости по критерию Найквиста удобнее производить по ЛЧХ разомкнутой системы. Очевидно, что каждой точке АФЧХ будут соответствовать определенные точки ЛАЧХ и ЛФЧХ.
Пусть известны частотные характеристики двух разомкнутых систем (1 и 2), отличающихся друг от друга только коэффициентом передачи K1 < K2. Пусть первая система устойчива в замкнутом состоянии, вторая нет (рис. 4.3.7).
Если W1(p) - передаточная функция первой системы, то передаточная фу
|
из
5.00
|
Обсуждение в статье: Алгебраические критерии устойчивости. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы