 |
Главная |


Поляризованные электромагнитные реле
|
из
5.00
|
Поляризованными называют электромагнитное реле, у которого направление перемещения якоря зависит от направления тока в катушке реле, т.е. полярности входного напряжения, что достигается взаимодействием двух магнитных потоков: рабочего Фр, образованного катушкой, и поляризованного Ф0, создаваемого постоянным магнитом. Магнитопроводы поляризованных реле конструируются по дифференциальной или мостовой схеме.
Поляризованное реле с дифференциальной схемой представлено на рисунке 1.18, а. Постоянный магнитный поток Ф0 от постоянного магнита 5 в этом реле разветвляется в магнитопроводе на два потока: Ф1 и Ф2. Реле имеет две одинаковые рабочие обмотки 4 и 7, соединенные последовательно. При симметричном положении якоря значения потоков Ф1 в воздушном зазоре δ1 и Ф2 в воздушном зазоре δ2 одинаковы. В зависимости от полярности подводимого напряжения в одном воздушном зазоре, например δ2, результирующий ток увеличивается: Фδ2 = Ф2 + Фр, а в другом, δ1, - уменьшается: Фδ1 = Ф1 + Фр. В результате этого якорь 6 реле перебрасывается в правую сторону, замыкая контакты 2 и 3.
При подачи на рабочие обмотки напряжения другой полярности увеличивается результирующий поток в зазоре δ1 и уменьшается в зазоре δ2. Якорь реле перебрасывается влево, замыкая тем самым контакты 1 и 2. поляризованное реле с мостовой схемой магнитопровода представлено на рисунке 1.18,б.
Принцип действия поляризованных реле с мостовыми схемами магнитопровода аналогичен принципу действия реле с дифференциальной схемой. Однако в связи с тем, при мостовой схеме магнитопровода магнитная цепь для потока Фр рабочей обмотки выполнена отдельно от цепей Ф1 + Ф2 потоков, создаваемых постоянным магнитом, поляризованные реле с мостовыми схемами магнитопроводов имеют более высокую стабильность параметров и устойчивость к внешним механическим воздействиям.
Поляризованные реле могут настраиваться в зависимости от положения неподвижных контактов и натяжения (сжатия) пружин, воздействующих на якорь (на рисунке 1.18 пружины не показаны), на двухпозиционную, двухпозиционную с преобладанием какого-либо состояния реле или трехпозиционную работу. Пружины с двух сторон воздействуют на якорь, стремясь удерживать его в нейтральном (среднем) положении. Если натяжение пружин слабое и неподвижные контакты расположены симметрично относительно нейтрали, то при снятии напряжения с рабочей обмотки реле за счет потока Ф1 или Ф2 постоянного магнита 5 остается в том же положении, в котором он находился до снятия напряжения. Следовательно, остаются замкнутыми соответствующие контакты реле (например, контакты 1 –2 на рисунке 1.19, а).

Рисунок 1.18 – Электромагнитные поляризованные реле
В этом случае механическое усилие пружин 4, стремящиеся возвратить якорь в нейтральное положение, что меньше тягового усилия от потока постоянного магнита, стремящегося удержать якорь реле в притянутом положении. При подаче на рабочую обмотку реле напряжения противоположной полярности якорь реле сразу перебрасывается в противоположное крайнее положение, размыкая контакты 1 – 2 и замыкая контакты 2 – 3. при снятии напряжения контакты 2 – 3 останутся замкнутыми.

Рисунок 1.19 – Настройка работы поляризованного реле
Таким образом, якорь реле занимает только два устойчивых положения (позиции): крайнее левое (замкнуты контакты 1 – 2) или крайнее правое (замкнуты контакты 2 – 3).
Если неподвижный контакт, например 1, установить с той же стороны относительно нейтрали, что и второй неподвижный контакт 3 (рисунок 1.19, б), то тяговое усилие от потока Ф1 (потоки показы только на рисунке 1.19, а) постоянного магнита, стремящиеся удержать якорь реле в крайнем левом положении, будет намного меньше тягового усилия от потока Ф2 постоянного магнита, стремящегося удержать якорь в крайнем правом положении. В результате этого при соответствующем выборе жесткости пружины 4 при снятии напряжения с рабочей обмотки реле его якорь от воздействия тягового усилия от потока Ф2 всегда устанавливается и удерживается в крайнем положении.
Таким образом, при такой настройке поляризованного реле его якорь занимает два положения: крайнее левое положение (замкнуты контакты 1 – 2) при подаче на рабочую обмотку реле напряжения соответствующей полярности или крайнее положение (замкнуты контакты 2 – 3) при подаче на рабочую обмотку напряжения противоположной полярности, а также при снятии напряжения с рабочей обмотки (приоритет замыкания контактов 2 – 3).
Если при симметричном положении контактов 1 и 3 относительно нейтрали выбрать пружину большей жесткости, обеспечивающей превышение механического усилия над тяговым усилием от потоков постоянного магнита в крайних положениях якоря, то при снятии напряжения с рабочей обмотки реле его якорь будет устанавливаться в нейтральное положение при разомкнутых контактах реле, рисунок 1.19, в.
В этом случае поляризованное реле обеспечивает трехпозиционную работу6 1) замкнуты контакты 1 – 2 при подаче на рабочую обмотку постоянного напряжения соответствующей полярности; 2) замкнуты контакты 2 – 3 при подаче на рабочую обмотку постоянного напряжения противоположной полярности; 3) разомкнуты все контакты при снятии напряжения с рабочей обмотки.
Контакты поляризованных реле допускают коммутационные токи 0,2 – 1 А; время срабатывания 1 – 5 мс.

Рисунок 1.20 – Поляризованное реле типа РП-7
Отечественной промышленностью выпускаются поляризованные реле различных типов и с различной настройкой контактов. Например, реле типа РП-4 – двухпозиционное (с нейтральной настройкой); реле типа РП-5 – трехпозиционное; рели типа РП-7 – двухпозиционное с преобладанием.
На рисунке 1.20 показано поляризованное реле типа РП-7, состоящее из катушки 1, полюсных наконечников 2, якоря 3, контактных пружин с подвижными контактами 4, неподвижных контактов 5, магнитопровода 6, керамической колодки 7 со штырьковыми выводами, что позволяет быстро включать реле в рабочую схему, вставляя его в соответствующую соединительную колодку.
Реле времени
При создании релейных схем автоматического управления различными технологическими процессами, а также машинами и агрегатами необходимо осуществлять замедление (задержку) срабатывания или отпускания после подачи на его вход командного сигнала.
Эту функцию выполняют релейные преобразовательные устройства, называемые реле времени. Реле времени, как правило, имеют элементы, посредством которых осуществляется регулируемая перенастройка выдержки времени в широких пределах. Все реле времени можно подразделить на – электромагнитные, моторные, электронные.
Электромагнитное реле времени с пневматической задержкой представляет собой устройство, состоящее из приводного механизма электромагнитного типа и пристроенного пневматического механизма задержки. Пневматическое реле времени РВП-72 имеет выдержку времени 0,2 – 180 с и предназначены для использования в цепях переменного тока напряжением 127 и 220 В. Выдержка времени получается за счет медленного натекания воздуха в камеру с регулируемым сечением отверстия. Эти реле имеют разные наборы контактов: замыкающие, размыкающие с выдержкой времени при замыкании или размыкании, а также наборы мгновенного срабатывающих контактов.
Пневматическое реле времени, рисунок 1.21 имеет электромагнит 1 и пневматическую приставку с микропереключателем 2. Герметическая камера 3 пневматической приставки сообщается с атмосферой через узкое отверстие 4. Камера 3 перегорожена эластичной плоской мембраной 5, выполненной из резины. Мембрана соединена со штоком 6, который опирается на якорь электромагнита 1.
При подаче управляющего сигнала якорь электромагнита 1 втягивается. Шток 6, лишенный опоры, под действием пружины 11 медленно опускается вниз по мере заполнения полости приставки воздухом через отверстие 4. В конце хода штока рычаг 8 производит переключение контактов микропереключателя 2. возврат реле в исходное положение происходит при снятии входного сигнала с электромагнита под действием пружины 9. При этом воздух пневматической камеры мгновенно вытесняется через обратный клапан 7. возврат контактов реле, следовательно, происходит без задержки времени. Для регулировки выдержки времени реле используют винт 10, изменяющий сечение дросселирующего отверстия 4.
Моторное реле времени. Для получения больших выдержек времени (десятки минут и часы) используют электродвигательные (моторные) реле времени. Моторные реле времени в своей основе имеет специальный низкоскоростной двигатель и редуктор с большим передаточным числом, на валу редуктора. Механизм реле времени, рисунок 1.22 состоит из редуктора 1, диска времени 2, имеющего несколько зубцов, контактов 3, включенных в цепь катушек электромагнитов или пускателей производственной машины, и катушки 4 паузного механизма 5. Диск времени, вращаясь с заданной скоростью, своими зубцами замыкает контактную группу 3 и включает электродвигатель производственного механизма или другие технологические установки. При помощи концевого выключателя размыкается цепь механизма 5. механизм реле приводится в действие синхронным двигателем. Выдержка времени создается вследствие замедления, получаемого в редукторе двигателя, и дополнительного редуктора, установленного в реле.

Рисунок 1.21 - Пневматическое реле времени с электромагнитом
По такому принципу работает реле времени РВТ-1200 с пределами регулирования 1 – 20 мин, погрешностью выдержки времени ±0,5 сек. Оно имеет пять независимых по времени цепей срабатывания. Подобные реле чаще всего применяют для задания программы автоматического управления каким-либо процессом, поэтому их часто называют также программными.

Рисунок 1.22 – Моторное реле времени
На рисунке 1.23 приведена схема моторного реле времени РВТ-1200. при замыкании ключа К синхронный двигатель с редуктором начинает вращаться. Одновременно возбуждается электромагнит ЭМ и сцепляет зубчатые колеса Z1и Z2. На одной оси с колесом Z1 закреплены профильные шайбы (кулачки), одна из которых показана на рисунке. Двигатель начинает вращать профильные шайбы в направлении, указанном стрелкой, натягивая при этом пружину F2.Как только уступ выреза профильной шайбы S подойдет к выступу рычага С, рычаг под действием пружины F3 повернется, размыкая контакты 1 – 2 в цепи двигателя СД и замыкая контакты 3 – 4 выходной цепи реле. Другие профильные шайбы на оси колеса Z1 должны быть установлены на меньшие независимые выдержки времени и замыкать (или размыкать) каждая свои, также не показанные на схеме контакты внешних цепей.

Рисунок 1.23 – Принципиальная схема моторного реле времени
При размыкании контактов 1 – 2 двигатель СД останавливается, а все профильные шайбы остаются в том положении, которого они достигли до тех пор, пока ключ SA замкнут. При размыкании SA сцепляющий электромагнит ЭМ отпустит якорь, и пружина F1 расцепит колеса Z1 и Z2. Профильные шайбы под действием пружины F2 повернутся назад до упора А. При этом контакты окажутся вновь в исходном положении, и реле времени готово к новому включению. Положение шайб на оси колеса Z1 определяет время замедления срабатывания данного контакта. Оно (установка времени) может быть установлено с помощью шкалы, градуированной в минутах и секундах.
Реле времени с электромагнитным приводом типа ЭВ-100 на постоянном токе показано на рисунке 1.24. По имеющейся в реле шкале может задаваться выдержка времени замыкающих и проскальзывающих контактов. Реле этого типа могут создавать выдержки времени от 0,1 до 20 сек, и имеют три разновидности исполнения контактов.
При подаче напряжения на обмотку 7 электромагнита цилиндрический плунжер 6 втягивается, сжимая возвратную пружину, при этом освобождается рычаг 5 сцепления с часовым механизмом. Часовой механизм 4 под действием встроенной в нем пружины 1 начинает вращаться, обеспечивая равномерное движение стрелки с подвижным контактом 3, который через заданный промежуток времени вызывает замыкание неподвижных контактов 2, закрепленных на контактной колодке. Выдержка времени задается поворотом контактной колодки 2 против соответствующей цифры на шкале.
Выпускают также аналогичные реле на переменном токе типа ЭВ-200.

Рисунок 1.24 – Реле времени ЭВ-100
Электронные (полупроводниковое) реле времени (ЭРВ), обычно в своих схемах используют различные полупроводниковые элементы (чаще всего транзисторные) и конденсаторы, время разряда или заряда которых и определяет выдержку времени, рисунок 1.25.
В исходном положении внешний управляющий контакт К замкнут и на базу транзистора VT1 подан отрицательный потенциал источника питания GB. Транзистор открыт, при этом потенциал базы транзистора VT2 будет положительным по отношению к его эмиттеру и будет закрыт. В результате выходное реле KV будет отключено. В исходном положении конденсатор С будет заряжен с показанной на рисунке полярностью своих обкладок.
 |
Рисунок 1.25 – Схема устройства электронного реле времени
Команда на начало отсчета времени подается при размыкании внешнего управляющего контакта К. после этого начинается разряд конденсатора С через резистор R2 и переход эмиттер – база транзистора VT1. В конце разряда транзистор VT1 закроется, что приведет к появлению на базе транзистора VT2 отрицательного потенциала. Оно откроется, по обмотке реле KV начнет протекать ток, оно сработает и переключит свои контакты. Отсчет времени закончится.
Выдержка времени такого реле определяется временем разряда конденсатора С, которое зависит от величины его емкости и сопротивления резистора R2. Регулируя эти величины, можно устанавливать требуемые выдержки времени реле. Выпускаемые электронные реле времени обеспечивают выдержку времени от 0,1 с до 10 мин.
Маятниковое механическое реле времени рисунок 1.26 состоит из электромагнита с втяжным якорем 1, который при подаче входного сигнала перемещает тягу 2 и, сжимая пружину 3, стремится переместить рычаг с зубчатым сектором 4 справа налево. Но спусковое зубчатое колесо 5 со скобой 6 может поворачиваться за каждое качение маятника 7 только на один зуб, благодаря чему скорость перемещения зубчатого сектора ограничивается. После этого как все зубцы сектора 4 выйдут из зацепления с храповым колесом 8, сработает микропереключатель 9.
При снятии выходного сигнала с электромагнита 1 сектор 4 быстро возвращается в исходное положение под действием веса якоря электромагнита 1 сектор 4 быстро возвращается в исходное положение под действием веса якоря электромагнита 1 и усилия пружины 3. Микропереключатель выключается без задержки времени. Таким образом, обеспечивается задержка времени только при срабатывании реле, но не при отпускании.
Грубая настройка времени срабатывания регулируется винтом 10, ограничивающим длину зацепления сектора 4 с храповым колесом 8. Точная настройка времени регулируется перемещением груза маятника 7. Маятниковое реле обеспечивает выдержку времени до десятков секунд.

Рисунок 1.26 – Маятниковое реле времени с электромагнитом
Специальные виды реле
Наряду с наиболее распространенными реле электромагнитного типа в системах автоматики находят применение и реле других типов, в которых тяговое усилие, необходимое для переключения контактов, создается не с помощью электромагнита. К такой группе реле относятся реле с магнитоуправляемыми контактами, магнитоэлектрические, электродинамические и индукционные реле.
Реле с магнитоуправляемыми контактами, называемые герконами (герметизированные контакты), рисунок 1.27 представляют собой стеклянную ампулу, заполненную инертным газом, а также азотом и водородом или из которой выкачан воздух (вакуумный геркон), в которую впаяны тонкие упругие ферромагнитные пластинки, выполняющие одновременно роль контактов, упругих элементов и части магнитопровода.
Управляются герконы внешним магнитным полем, которое создается катушкой обтекаемой током, или постоянным магнитом. Под действием магнитного поля концы пластин притягиваются, замыкая коммутируемую цепь. При исчезновении поля пластины вследствие силы упругости расходятся, рисунок 1.27, а. Для уменьшения переходного сопротивления контактов на концы пластин-контактов наносится слой серебра, золота, родия или других благородных металлов. Этот слой выполняет также роль немагнитной прокладки, не допускающей залипания контактов.

Рисунок 1.27 – Реле с магнитоуправляемыми контактами
Герконы обладают большим сроком службы с числом срабатываний, достигающим 106 – 109. Благодаря малому расстоянию между контактами и малой инерционности пластинок-контактов реле с магнитоуправляемыми контактами – сравнительно быстродействующие элементы tср = 0,5 ÷ 2.0 мс.
Промышленность выпускает разнообразные магнитоуправляемые контакты-герконы с замыкающими, размыкающими и переключающими контактами рисунок 1.27, а – в, а также реле с магнитоуправляемыми контактами, внутри катушки может находиться один или несколько герконов, рисунок 1.27, г.
Реле на магнитоуправляемых контактах предназначены для использования в схемах автоматики в качестве промежуточных реле, реле защиты и запоминающих элементов. Реле промежуточные РПГ и РПГ-2 (миниатюрные) имеют большие функциональные возможности и повышенную надежность благодаря использованию контактов на герконах КЭМ-1. Реле с магнитной памятью РМГ применяют в схемах автоматики в качестве элементов памяти.
Магнитоэлектрические реле. Принцип действия магнитоэлектрического реле основан на взаимодействии магнитного поля постоянного магнита с током, протекающим по обмотке, выполненной в виде поворотной рамки.
Магнитоэлектрическое реле, рисунок 1.28 состоит из постоянного магнита 1, между полюсными наконечниками которого находится цилиндрический стальной сердечник 2. В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиальное направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 3 с обмоткой из тонкого провода, к которой подводится ток по спиральным пружинам из фосфористой или оловянно-цинковой бронзы. Эти пружины создают противодействующий момент, стремящийся установить рамку с обмоткой таким образом, чтобы ее плоскость была направлена по оси полюсов магнита 1. При пропускании тока I по обмотке реле на рамку с обмоткой действует вращающий момент, заставляющий ее поворачиваться вокруг оси в направлении, определяемом полярностью тока. Жестко закрепленный на рамке подвижный контакт 4 замыкается с одним из неподвижных контактов 5 или 6.
Сила, действующая на проводник длиной l, обтекаемой током I и помещенный в магнитное поле с индукцией В, определяется на основании закона Ампера:
F = BlI. (16.1)
На рамку длиной l, шириной а, с числом витков ω действует вращающий момент
 . (16.2)
. (16.2)

Рисунок 1.28 – Магнитоэлектрическое реле
Для конкретного реле Blaw = K = const, следовательно,
Mир = KI. (16.3)
Из уравнения (16.3) видно, что при неизменных конструктивных параметрах реле и заданном токе I в его обмотке вращающий момент имеет постоянное значение.
В то же время противодействующий момент, создаваемый закручивающимися токопроводящими пружинами, пропорционален углу закрутки, т.е. углу поворота рамки. Поскольку направление поворота рамки определяется направлением тока в обмотке, магнитоэлектрическое реле является поляризованным и может быть выполнено трехпозиционным.
По сравнению с другими электромеханическими реле магнитоэлектрическое реле является наиболее чувствительным, оно срабатывает при мощности управления в доли милливатта. Усилие на контактах магнитоэлектрического реле невелико (порядка 10-2 Н и менее), поэтому для повышения надежности контакты выполняются из платины и платинородиевого сплава. При резком изменении усилия маломощные контакты быстро изнашиваются, поэтому магнитоэлектрические реле используются обычно в схемах, где сигнал постоянного тока меняется медленно. По своему быстродействию они уступают нейтральным магнитным реле.
Электродинамические реле. Принцип действия электродинамического реле основан на взаимодействии двух катушек с током, одна из которых подвижна, а другая неподвижна. От магнитоэлектрического реле электродинамическое реле отличается тем, что индукция в рабочем зазоре создается не постоянным магнитом, а неподвижной катушкой на сердечнике, т.е. электромагнитным способом. От электромагнитного реле электродинамическое реле отличается тем, что тяговое усилие воздействует не на стальной якорь, а на подвижную катушку.
Устройство электродинамического реле показано на рисунке 1.29 на магнитопровод 3 надета неподвижная катушка 2, обтекаемая током I2. между полюсными наконечниками магнитопровода находится цилиндрический стальной сердечник 4. В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиальное направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 1 с обмоткой из тонкого провода, к которой подводится ток I1 по спиральным пружинам, создающим противодействующий момент, стремящийся установить плоскость рамки 1 вдоль оси полюсных наконечников.
При подаче управляющего тока I1 в обмотку рамки 1 она будет поворачиваться в зазоре между полюсными наконечниками и сердечником. Жестко закрепленный на рамке подвижный контакт 5 замыкается с одним из неподвижных контактов 6 и 7.
Сила, действующая на проводники рамки электродинамического реле, определяется законом Ампера. Следовательно, будут справедливы уравнения (16.1) и (16.2) . однако входящая в эти уравнения индукция. В не постоянна, а определяется намагничивающей силой, создаваемой катушкой 2 с током I2:
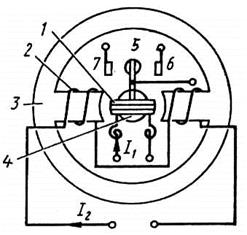
Рисунок 1.29 – Электродинамическое реле
В = I2 w2 /(Rм sδ), (16.4)
где Rм – магнитное сопротивление на пути магнитного потока возбуждения; sδ – площадь поперечного сечения рабочего воздушного зазора.
Подставляя (16.4) в (16.2) и выразив через постоянный коэффициент К сочетание всех неизменных конструктивных и обмоточных данных реле, получим уравнение для вращающего момента электродинамического реле:
Mвр = K I1 I2. (16.5)
Из (16.5) видно, что направление поворота рамки зависит от направления токов в обеих обмотках реле, т.е. оно будет положительным при одинаковых направлениях токов и отрицательным при разных направлениях.
При работе реле на постоянном токе и питании его неизменным по значению и направлению током возбуждения I2 электродинамическое реле (как и магнитоэлектрическое) является поляризованным и трехпозиционным. В зависимости от направления управляющего тока I1 замыкается пара контактов 6 – 7 или 6 – 8, а при отсутствии тока I1 контакт 6 находится в среднем, незамкнутом, положении.
Однако в отличии от магнитоэлектрического реле электродинамическое может работать при питании переменном током. В этом случае на рамку воздействует переменный магнитный поток, а направление поворота определяется средним за период значением вращающего момента
Mвр. ср. = K I1 I2 cosφ, (16.6)
где I1 и I2 – действующие значения токов в обмотках; φ – угол сдвига фаз между токами.
Из (16.6) следует, что электродинамическое реле реагирует на фазу входного сигнала, т.е. его можно использовать как реле сдвига фаз, срабатывающее при определенном значении φ. Это же реле может реагировать и на мощность переменного или постоянного тока. В этом случае на одну из обмоток подается ток, а на другую – напряжение цепи.
При последовательном соединении обмоток I1 =I2 = I вращающий момент
Mвр. = K I2,(16.7)
Т.е. зависимость тягового усилия от тока будет аналогична электромагнитному нейтральному реле.
К недостаткам электродинамических реле следует отнести их большие габариты и вес.
Индукционные реле. Принцип действия индукционных реле основан на взаимодействии переменных магнитных потоков с токами, индуцированными этими потоками.

Рисунок 1.30 – Индукционное реле скорости
Рассмотрим принцип действия индукционного реле скорости. Реле скорости (РКС) механически соединяется с валом электродвигателя механизма скорость, которого требуется контролировать. РКС работает аналогично асинхронному двигателю и устроено следующим образом. Ротор реле, рисунок 1.30 представляет собой постоянный магнит 1, соединенный с помощью валика с валом двигателя. Постоянный магнит помещен внутри алюминиевого цилиндра 2, имеющего обмотку в виде беличьей клетки. Цилиндр может поворачиваться вокруг оси валика 0 на небольшой угол, и переключать при этом с помощью упора 6 контакты 5 и 7. При неподвижном двигателе упор занимает среднее положение, и контакты реле находятся в «нормальном» положении. При вращении двигателя и тем самым магнита 1 уже при небольших скоростях на цилиндр 2 начинает действовать вращающий момент, под действием, которого он поворачивается и обеспечивает с помощью упора 6 воздействует на контакты 5 или 7, вызывая их замыкание с контактами 4 или 8. При скорости двигателя, близкой к нулю, цилиндр возвращается в среднее положение и контакты 5 или 7 переходят в свое «нормальное» состояние. Величина скорости, при которой переключаются контакты реле, определяется положением настроечных винтов 9, т.е. регулированием натяжения пружины.
Реле контроля скорости удобно использовать при автоматизации процесса торможения, когда требуется обеспечивать отключение двигателя от сети после снижения его скорости до нуля.
Реле счета импульсов. Реле счета импульсов позволяет отсчитывать наперед заданное количество импульсов и передавать команду на исполнительные механизмы после отработки этих импульсов. С помощью этого реле осуществляется строгая цикличность в управляемом процессе.
Основным элементом реле счета импульсов является шаговый искатель (распределитель). Шаговый распределитель прямого хода, рисунок 1.31, а, состоит из электромагнита 1 и якоря с храповым колесом 3. При повороте якоря вокруг оси собачка 6 под действием пружины 7 зацепляется за зуб храпового колеса 3 и поворачивает его вал на одно деление зуба, перемещаясь до упора 5. поворот вала вызывает перемещение контактных щеток 2 по контактным (ламельным) рядам. По окончании действия импульса собачка 6 возвращается под действием пружины 8 в исходное положение. Собачка 4 препятствует обратному повороту храпового колеса. При подаче очередного импульса в электромагнит вал искателя прямого хода поворачивается на одно деление зуба, а щетки перемещаются на следующую ламель и т.д. Обычно в искателях бывает от трех до восьми ламельных рядов.

а – прямого хода; б – обратного хода
Рисунок 1.31 – Кинематическая схема шаговых распределителей
Распределитель обратного хода, рисунок 1.31, б, отличается от первого лишь тем, что якорь снабжен движущейся пружиной 8, обладающей достаточной упругостью для создания усилия, необходимого для перемещения щеток. При притяжении якоря собачка 6 скользит по зубьям храпового колеса 3, не входя с ними в зацепление, и заводится пружиной 8. После отключения обмотки электромагнита пружина 8, двигая собачку 6, поворачивает храповое колесо на один зуб.
На рисунке 1.32 приведен общий вид шагового искателя.

1 – статор с ламелями; 2 – движущая собачка; 3 – скользящие контакты; 4 – ротор с храповым колесом; 5 – барабан; 6- обмотка электромагнита; 7 – контактная группа; 8 - якорь
Рисунок 1.32 – Шаговый искатель ШИ-17
Фотоэлектрические реле состоят из фотоэлемента (воспринимающего элемента), усилителя и выходного электромеханического реле. Фотоэлемент преобразует падающий на него световой поток в изменении сопротивления или ЭДС.
Фотореле применяют в системах автоматического контроля и регулирования различных величин и параметров (температуры, уровня, размеров и т.д.), изменение которых приводит к изменению светового потока. На рисунке 1.33, а приведена схема фотореле с фоторезистором BLR и электромагнитным реле К1 и К2, которая срабатывает при освещении BLR. В цепь фоторезистора включено слаботочное реле постоянного тока К1 выполняющее функции промежуточного усилителя и управляющее более мощным выходным реле К2. При затемнении BLR его сопротивление велико, поэтому ток в цепи катушки реле К1 имеет малую величину и реле К1 отключается, а следовательно и отключается выходное реле К2.
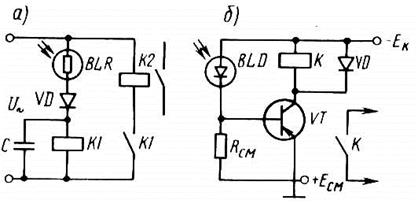
Рисунок 1.33 – Схемы фотореле на фоторезисторе (а) и фотодиоде (б)
Фоторезисторы имеют малые габаритные размеры и массу, высокую чувствительность и надежность. Однако они более инерционны, чем другие фотоэлементы. При использовании в фотореле в качестве выходных элементов электромеханических реле, время срабатывания которых значительно, инерционность фоторезисторов не имеет существенного значения. В то же время фоторезисторы имеют большую мощность рассеяния, что позволяет получать простые и надежные схемы фотореле.
В схеме фотореле с фотодиодом, рисунок 1.33, б в качестве промежуточного усилителя используют полупроводниковый усилитель на транзисторе VT , в коллекторную цепь которого включена катушка выходного реле К. При затемнении фотодиода BLD, включенного в цепь в непроводящем направлении, его сопротивление велико и, следовательно, транзистор VT заперт. Выходное реле при этом обесточено и сигнал на выходе отсутствует. При освещении фотодиода его сопротивление в непроводящем направлении уменьшается во много раз, что обуславливает возникновение тока в цепи базы. Транзистор отпирается, и возникающий ток в цепи коллектора обеспечивает срабатывание выходного реле и появление сигнала на выходе. Диод VD защищает транзистор VT от перенапряжений при его запирании. Фотодиоды, как и все полупроводниковые элементы, достаточно надежны, имеют малые размеры и большую чувствительность, чем фоторезисторы и другие фотоэлементы.
|
из
5.00
|
Обсуждение в статье: Поляризованные электромагнитные реле |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы