 |
Главная |


Б. Для систем, отрабатывающих ступенчатые входные воздействия в опти-мальном переходном режиме
|
из
5.00
|
Методические указания
к курсовому проектированию по дисциплине
"Техническая механика"
для студентов специальностей
“Информационно-измерительная техника"
Киев 2000 г.
Методические указания к курсовому проектированию по дисциплине
"Техническая механика" для студентов специальностей “Информационно-измерительная техника" /Сост. В. А. Бойко, В. C. Детлинг. - Киев: НТУУ КПИ. 2000.
1 ОБЩИЕ МЕТОДИЧЕСКИЕ УКАЗАНИЯ
1.1 Цель курсового проектирования
Курсовой проект по курсу "Техническая механика" является первой самостоятель-ной комплексной работой студентов в процессе подготовки к инженерной деятельности. Цель курсового проекта - систематизировать и закрепить теоретические знания, полу-ченные при изучении курсов "Инженерная графика", "Физика", "Химия", "Математика", "Техническая механика", приобрести навыки проектирования новых изделий (в част-ности электромеханических устройств с учетом современных требований); использова-ния справочной литературы, стандартов, единых норм и расценок; разработки тексто-вой и графической документации; подготовки к выполнению курсовых проектов по профилирующим предметам.
Курсовой проект выполняется на основании технического задания, выдаваемого руководителем проекта.
1.2. Содержание и объем курсового проекта
В процессе работы над курсовым проектом студенты рассчитывают основные параметры заданного механизма и разрабатывают его конструкцию. Конструкторская документация проекта состоит из пояснительной записки (15-20 страниц), принципиа-льной кинематической схемы, сборочных чертежей устройства и сборочной единицы, рабочих чертежей 5-8 нестандартных деталей (вала, зубчатого колеса, шкалы, пружи-ны, стакана, стойки и т.п.).
Пояснительная записка в общем случае должна содержать следующее разделы:
Введение.
Назначение и область применения проектируемого изделия.
Техническая характеристика изделия.
Описание и обоснование выбранной конструкции.
Расчеты, подтверждающие работоспособность и надежность конструкции:
расчет мощности и выбор электродвигателя;
расчет кинематических параметров (определение общего передаточного отношения и передаточных отношений ступеней);
расчеты на прочность;
расчеты кинематической точности и погрешности мертвого хода;
выбор материалов и покрытий;
определение критериев конструктивного качества и экономической эффектив-ности конструкции.
Конкретный перечень конструкторской документация, подлежащей обязательной разработке, указывается в техническом задании на курсовой проект.
1.3. Оформлениедокументации проекта
Вся графическая и текстовая документация проекта должна оформляться в полном соответствии с требованиями Единой системы конструкторской документации (ЕСКД) и СТП КПИ 2.001-83 "Курсовые проекты. Требования к оформлению документации".
2. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ДЛЯ ПРИВОДОВ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ МАЛОЙ МОЩНОСТИ
Исходные данные
1 Назначение электропривода, общая характеристика режима работы электродви-гателя, специальные требования.
А. Приводы специализированных устройств (магнитофоны, МТЛ устройств ЭВМ, печатающие машины и др.). Режим работы и требования к электродвигателю опреде-ляются специальными техническими условиями.
Б. Нерегулируемые приводы исполнительных механизмов управления, операцион-ных механизмов и технологических устройств, механизмов дистанционного управления. Режим работы двигателя длительный или повторно-кратковременный, нерегулируемый по частоте вращения, реверсивный или нереверсивный.
В. Нерегулируемые приводы приборов времени, программных устройств, МТЛ са-мопишущих приборов и др. Режим работа двигателя длительный или повторно-кратко-временный с постоянной стабилизированной частотой вращения, нереверсивный.
Г. Приводы следящих систем управления (приводы РЛС, графопостроителей, ма-нипуляторов, привод стабилизации положения корпусов и др.). Режимработы длитель-ный или повторно-кратковременный реверсивный, регулируемый по частоте вращения.
2. Характеристика источника питания двигателя: для постоянного тока – напряже-ние и допускаемые токи нагрузки; для переменного - напряжение, частота и вид сети (однофазная, трехфазная).
3. Конструктивные требования:
способ крепления двигателя;
количество выходных концов вала ротора;
наличие встроенных элементов (тахогенератор, редуктор и др.).
4. Функциональные требования: допускаемое изменение частоты вращения, способ регулирования, время переходного процесса, характеристика режима работа следящей системы и входных сигналов.
5. Эксплуатационные требования: срок службы; температура внешней среды; тре-бования устойчивости к линейным ускорением, вибрации, к ударным перегрузкам, к изменениям атмосферного давления и влажности.
6. Характеристика внешней нагрузки: числовое значение или закон изменения ста-тического момента нагрузки; скорости и ускорения вала нагрузки.
2.2 Выбор серии электродвигателей
По исходным данным выбирают серии двигателей переменного или постоянного тока, соответствующих требованиям пп. 1 и 2 группы привода (А, Б, В или Г) (см. под-разд. 2.1), используя каталоги или ограничительные перечни, например таблице 2.1.
Из группы серий и типов выбирают двигатели, удовлетворяющие требованиям
пп. 1-5 исходных данных, сравнивая требования с паспортными характеристиками конк-ретных типов двигателей. В первую очередь отбирают серии, соответствующие напря-жению питания, частоте сети и требуемой постоянной времени (для следящих систем), затем, учитывая степень обязательности, выбирают серии и типы, удовлетворяющие требованиям к конструкции, сроку; службы и устойчивости к климатическим и механи-ческим воздействиям.
Сравнительные характеристики некоторых серий двигателей приведены в таблицах 2.2 и 2.3. Если исходные требования перечнем серий одной группы не могут быть удов-летворены, используют серии нижестоящих групп в таблице 2.1: группу Б, например, можно дополнить перечнем групп В или Г.
Таблица 2.1-Перечень электродвигателей предпочтительного применения
| Группа | Общая характеристика | Серии или типы электродвигателей | ||
| переменного тока | постоянного тока | |||
|
А | Специальные
| для аппаратуры магнитной записи | ЭДГ; типы: АД-5; АДТ-6; АДТ-1,6 КД-3,5 КДП-6-4; ДК-16; КД-б-4 | ДКС; ДКМ типы: Д16-06; ВДС-02 МД-0,35-2ООО-9 |
| интегрирующие | ИД-1; ИД-2; ИД-9 | ДИ-6-1500А | ||
| для потенциомет-рических систем | РД-09 | СЛ-267; СЛ-367 | ||
| Б | Нерегулируемые
| общего при-менения Редук-торн. двигатели со встроенным редуктором | УАД; АОЛБ; АОЛ | Дв. авиац. Д-100; МА Ред.:МКМ; МСВ; МС-160; МФА; ДР-1; 5Р, МН или ЭДН |
| В | со стабилизиро-ванной частотой вращения | Г; ДСР; ДСГ; ДСА; ДСМ; ДСДР; ДСД; типы: СД-09; ЭГ-10 | ДПР; ДПМ в исп. Н3; ДРВ; ДП в исп. Цр, | |
| Г | Управляемые общего применения в следящих системах | АДП; ДИД; ЭМ; ДКМ; АД; ДМ; АДИ; ДАД; АСМ; с тахоге-нераторами АДТ; ДГ; СМА; СМБ | ДПМ; ДПР; ДП, СЛ, ДП, СД, ПЯ, | |
Таблица 2.2-Электродвигатели постоянного тока
| Характеристикипараметры | Серии электродвигателей | |||||||||||
| Д | ДРВ | СД | ДПМ | ДПP | МИГ | ДА | ||||||
| Напряжение питания В,
| < 6 | + | - | - | - | + | - | - | ||||
| 6 | - | - | - | - | + | - | - | |||||
| 12 | - | - | - | + | + | + | - | |||||
| 27 | + | + | + | + | + | + | + | |||||
| 60 | - | + | + | - | - | - | - | |||||
| 110 | - | - | - | - | - | - | - | |||||
| Номиналь ная мощно-сть, Вт | от | 0,1 | 0,1 | 8,0 | 0,5 | 0,3 | 10 | 2,0 | ||||
| до | 200 | 300 | 150 | 14 | 80 | 600 | 600 | |||||
| Электромехани-ческая постоян-ная времени,мс | 25… 100 | 15...100 | 11...150 | 45..90 | 12..20 | 1,3…8.5 | 30….160 | |||||
| С регулятором скорости | - | + | - | +/- | +/- | - | - | |||||
| С редуктором | - | - | - | - | - | - | - | |||||
| С тахогенер. | - | - | - | - | +/- | +/- | - | |||||
| С 0В"Лев" и "Пр | - | - | - | - | - | - | + | |||||
| С тормозной муфтой | - | - | - | - | - | - | +/- | |||||
| Кол. концов вала | 1/2 | 1 | 1 | 1/2 | 1/2 | 1/2 | 1 | |||||
| С фланцевым креплением | + | + | + | - | + | + | + | |||||
| С креплением по диаметру | + | - | - | + | + | - | + | |||||
| Последовательно-го возбуждения | + | - | - | - | - | - | + | |||||
| Параллельного возбуждения | + | + | + | - | - | - | - | |||||
| С постоянным магнитом | + | - | - | + | + | + | - | |||||
| Срок службы, тыс. ч, макс. | 1,5 | 1,5 | 0,5 | 1,0 | 3,0 | 0,5 | ||||||
| Устойчивость | к линейн. ускор | 35 | 15 | 15 | 50 |
100 |
35 | |||||
| к вибрационным нагрузкам | 12 | 10 | 10 | 10 | 10 | 15 | ||||||
| К ударным нагрузкам | 35 | 10 | 35 | 50 | 50 | 35 | ||||||
| К внешн. температу-рам, °С: | Å | 85 | 85 | 60 | 60 | 60 | 85 | |||||
| ; | 60 | 60 | 60 | 60 | 60 | 60 | ||||||
| К влажности, % | 98 | 98 | 98 | 98 | 98 | 98 | ||||||
| К внешнему атмосферному давлен, кПа | 2,5-150 | 2,5-150 | 2,5-200 | 50- 200 | 50- 300 | 2,5- 150 | ||||||
2.3. Выбор типоразмера двигателя и передаточного отношения редуктора
Энергетические, кинематические и динамические показатели привода зависят одновременно от характеристик двигателя и от параметров редуктора. Оптимальный ва-риант сочетания типоразмера двигателя, структуры редуктора и его передаточного отно-шения устанавливается, на основании энергетического, кинематического и динамиче-ского расчета системы ДВИГАТЕЛЬ-РЕДУКТОР-НАГРУЗКА. Для приводов группы А методика такого расчета разрабатывается применительно к конкретному виду привода.
Таблица 2.3 Электродвигатели переменного тока
| Характеристи-ки, параметры | Серия єлектродвигателей | |||||||||||||
| АДП | АДТ | ДИД | ДГ | ЭМ | ДKM | АД | Г | ДСД | ДСР | |||||
| Видпита-ния | 1-фазн. 3-фазн. | + | + | + | + | + | + | + | + | + | + | |||
| - | - | - | - | - | - | - | + | - | - | |||||
| Частота, Гц | 50 400 500 1000 | + | - | - | - | - | - | - | + | + | + | |||
| + | + | + | + | + | + | + | + | - | - | |||||
| + | + | - | - | - | - | - | - | - | - | |||||
| + | - | + | + | - | - | - | - | - | - | |||||
| Напряжениепитания, В | 36- 40 110
220 | + | + | + | + | + | + | + | + | - | - | |||
| + | + | - | - | 115 | - | - | - | 127 | - | |||||
| + | - | - | - | - | - | - | - | + | + | |||||
| Номинальная мощность, Вт | 2,1 -62 | 0,3 -13 | 0,1 –10 | 0,1 –5,0 | 0,4 -50 | 0,2-60 | 0,3–3,5 | 1,0 -40 | * | 0,2–0,3 | ||||
| Эл.-мех. пост. времени, мс | 6-82 | 22-500 | 26-160 | 50-290 | 15-170 | 15-150 | 10-20 | 30-50 | ||||||
| Синхронные | - | - | - | - | - | - | - | + | + | + | ||||
| С редуктором | - | - | - | - | +/- | - | - | +/- | + | + | ||||
| С тахогенерат. | - | + | - | + | - | - | - | - | - | - | ||||
| Кол. концов вала | 1/2 | 1 | 1 | 1 | 1/2 | 1 | 1/2 | 1 | 1 | 1 | ||||
| С фланцевым креплением | - | - | + | + | + | + | - | + | + | + | ||||
| С креплением по диаметру | + | + | - | - | - | - | + | + | - | + | ||||
| Срок службы, тыс. часов max | 2 | 2 | 1 | 1,5 | 1 | 1 | 1 | 5 | 1 | 10 | ||||
| Устойчивость | К лин. ускор. | 25 | 25 | 8 | 15 | 15 | 15 | 8 | 8 | |||||
| К вибрациям | 12 | 12 | 5 | 5 | 5 | 5 | 3,5 | 3,5 | ||||||
| К ударам | 15 | 7 | 4 | 4 | 12 | 4 | 3 | 3 | ||||||
| К внеш-ним тем-перату-рам,°С | Å | 70 | 60 | 100 | 100 | 80 | 80 | 70 | 50 | 50 | 60 | |||
| Q | 50 | 40 | 60 | 60 | 60 | 60 | 50 | 60 | 40 | 40 | ||||
| к влажности отн, % | 98 | 98 | 98 | 98 | 98 | 98 | 98 | 98 | 98 | 98 | ||||
| к внешнему атмосфер-ному давле-нию. кПа | 2,5… 150 | 2,5… 150 | 2,5… 150 | 2,5… 150 | 2,5… 150 | 2,5… 150 | 2,5… 150 | 2,5… 150 | 2,5… 200 | 2,5… 150 | ||||
Примечание. Для параметров устойчивости указаны максимальные значения по сериям двигателей. Виброуотойчивость - для частот 200...300 Гц.
х Номинальная мощность двигателей ДСД около 12 мкВт.
2.3.1 Неуправляемый привод (группы Б и В)
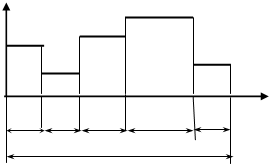
Основная нагрузка привода - постоянный и переменный во времени (рисунок 1) статический момент Тн.с(t)на выходном валу редуктора в режиме нормируемого или не-нормируемого по времени переходного процесса в периоды пуска или изменения нагру-зочного момента.
 Тн Т4
Тн Т4
Т1 Т3
Т2 Т5
t1 t2 t3 t4 t5
t∑
Рисунок 2.1- График изменения статического момента нагрузки.
Исходный кинематический параметр - средняя или номинальная угловая скорость на выходном валу редуктора -wн, рад/с.
Переходный процесс может быть ограничен временем tп ,с или предельным угло-вым ускорением вала нагрузки eн, рад/с2, при этом должен быть задан момент инерции нагрузки Iн, кг×м2.
В качестве рабочего режима двигателя принимается номинальный, для чего на его обмотки необходимо подавать номинальное напряжение, а передаточное отношение редуктора принимают
iр= ωдв /ωн, (2.1)
где ω дв - номинальная угловая скорость двигателя, который надлежит выбрать в следующем порядке.
1.Определить эквивалентный статический момент сопротивления на валу редук-тора, H·м:
 , (2.2)
, (2.2)
где Ti среднее значение момента в интервале i (см. рисунок 2.1);
ti- продолжительность интервала, c.
При постоянном значении момента Tнc принимают . Тэ = Tнс .
2. Определить необходимую мощность двигателя, Вт:
Nдв = Тэ· ωн· кн / ηр , (2.3)
где кн - коэффициент запаса: 1,05... 1,1 - если нет ограничений по времени пере-ходного процесса; 1.2...2,2 - при заданном времени разгона; при этом чем больше мо-мент инерции нагрузки, тем больше следует брать запас по мощности;
ηр - ориентировочное значение КПД редуктора: 0,7...О,9 - для простого цилинд-рического, планетарного или волнового; 0,4...О,7 - для червячного.
3. Выбрать типоразмеры двигателей, номинальная мощность которых равна Nдв или несколько больше. Если время разгона ограничено значением tn, отбирают двигате-ли, электромеханическая постоянная времени которых меньше τ0=tn/6. Для приводов с длительном режимом работы предпочтение отдают двигателям с большим сроком служ-бы и хорошим КПД, для повторно-кратковременного режима - высокоскоростным.
4. Определить передаточное отношение редуктора по уравнению (2.1). После раз-работки кинематической схемы редуктора и геометрического расчета его элементов выбранный двигатель необходимо проверить:
по номинальной мощности, используя неравенство
Nном ≥Тэ · ωдв / ηр · iр, (2.4)
где ηр - расчетное значение КПД редуктора;
по пусковому моменту, чтобы
Тп ≥ Тнсп / (iр ηр) + (Ірот + Ір +Ін/і2р)∙( ωдв /tn), (2.5)
где Тнсп - наибольший статическиймомент нагрузки при пуске, Н∙м;
Ірот - момент инерции ротора двигателя, кг∙м2;
Ір - момент инерции редуктора, приведенный к валу двигателя, кг∙м2;
по времени разгона, чтобы
tр = 3∙ (Ірот + Ір +Ін/і2р) ∙ ωдв/ (Тп - Тсп) ≤ t n , (2.6)
гдеТсп - статический момент нагрузки при пуске, приведенный к валу двигателя Н∙м: Тсп = Тнсп/(iр ηр).
2.3.2 Следящий привод. Группа Г
В следящем приводе вал нагрузки через редуктор поворачивается по сигналам управления, поступающим от усилителей следящей системы. Привод, т.е. двигатель и редутор, являясь исполнительной частью следящей системы должен обеспечивать на нагрузочном валу необходимые статические и динамические характеристики (переме-щения, скорость и ускорение) в соответствии с требованиями оптимального переход-ного процесса либо в точности, повторяя закон изменения управляющего сигнала. В этих условиях выбор передаточного отношения редуктора играет решающую роль. Оптимальное значение передаточного отношения зависит от выбора критерия оптими-зации (обеспечение максимального ускорения вала нагрузки, получение минимальной мощности двигателя или наименьшего пускового момента), а также от соотношения статического и динамического моментов.
Внешняя нагрузка следящего привода характеризуется статическим моментом Тнс, моментом инерции Ін, а внутренняя - статическим моментом сопротивления в редук-торе, учитываемым через КПД ηр, приведенным моментом инерции редуктора Ір, момен-том инерция ротора Ірот электродвигателя.
Для воспроизведения входного сигнала двигатель должен обеспечивать необходи-мую угловую скорость ротора ω(t) = ωн(t)∙iр при соответствующих значениях вращаю-щего момента двигателя, равного моменту всех сил сопротивления, т.е. значениям
T(t) = Тнс /(iр ηр) + Ін· εн(t)/ ір + (Ірот + Ір) ∙ір · εн (t) (2.7)
и достаточную плавность слежения: приведенный к валу двигателя момент статической нагрузки не должен превышать 5...1O % значения пускового момента электродвигателя, а, следовательно, передаточное отношение редуктора должно удовлетворять неравен-ству
ір ≥ γ ∙ Тнс /Tп, (2.8)
где γ - коэффициент плавности следящей системы, а мощность двигателя в номи-нальном режиме - неравенству
Nном≥ γ ·Тнс · ωн max /2 (2.9)
Для систем высокой точности с погрешностями установок угла 0,0002...О,001 рад принимают γ = 10...20; при погрешностях по углу установки 0,002...0,007 рад можно принимать γ= 5...10.
Приведенные методы выбора параметров следящего привода не являются общими, а применяются для условий, указываемых в наименовании методики и во вводной части кним.
А. Для режимов с совпадающими во времени значениями ωнmax и εнmax.
Методика применима для систем, отрабатывающих сигналы вида
1) θ = ω0t; ωнmax =ωн =ω0; ε = 0
2) θ = ω0t + ε0 t2 /2;ωнmax=ωн=ω0 + ε0 tmax ; εнmax = ε0
3) θ = θ0 (1-e-αt ); ωнmax= ωнmax= θ0 · w; |ε|нmax = θ0 ·w2
4) θ = w0·t3+ w1·t2 + w2·t; ωнmax=Ò; εнmax = Ö
5) θ =2 θ0 t2 / tn2; ωнmax=2 θ0 / tn; |ε|нmax = 2 θ0 / tn2
используемые в приводах РЛС, вычислительных механизмах, приводах управления и др., основной режим работы которых - продолжительные или часто повторяющиеся пе-риоды работа с максимальной мощностью, т.е. работа двигателя в номинальном режиме.
Методика выбора электродвигателя
1. Отобрать двигатели, быстродействие которых, с
τ = Ірот · ωном / Тном (2.10)
меньше требуемого
τ = ωнmax / εнmax , (2.11)
где ωном - номинальная угловая скорость двигателя, рад/c;
Tном- номинальный момент на валу двигателя, Н∙м;
ωнmax -заданная максимальная угловая скорость вала нагрузки, рад/с;
εнmax - заданное максимальное угловое ускорение нагрузки, рад/с2.
2. Определить полную мощность нагрузки, Вт:
N∑ = (Tнс / η′р+ Iн εнmax) ∙ωнmax (2.12)
где Tнс - статический момент нагрузки, Н∙м;
η′р - ориентировочное значение КПД редуктора (см. формулу (2.3);
Iн - момент инерции нагрузки, кг ∙ м2.
3. Выбрать значения коэффициента плавности и установить соотношение нагрузок:
Tнс ≥ Iн∙ εнmax / (0,5∙ γ-1) (2.13)
Если Tнс больше правой части неравенства (13), выбор параметров привода выполняют по пп.4-8, если меньше - по пп. 9-12.
4. Определить относительное передаточное отношение
αск ≥  (2.14)
(2.14)
5. Определить необходимую номинальную мощность двигателя, Вт:
Nном 0 = (1+ α2ск)·N∑ (2.15)
и необходимый динамический коэффициент, Н∙м/с2:
Кдо=  (2.16)
(2.16)
6. Выбрать двигатель, у которого
Nном ≥ Nном 0 и Кд =  (2.17)
(2.17)
7. Определить оптимальное значение передаточного отношения редуктора
 (2.18)
(2.18)
8.. Если двигатель пришлось выбрать с большим запасом по мощности или Кд, проверить возможность применения передаточного отношения
при котором обеспечивается максимальное быстродействие. Его можно принять при выполнении условий:
 ;
;
 .
.
9. Необходимая мощность двигателя, Вт:
Nном 0 = 1,5∙ N∑. (2.20)
и необходимый динамический коэффициент, Н∙м/с2,
Кдо= 4,5∙ N∑∙ εнmax / ωнmax. (2.21)
10. Выбрать двигатель, для которого соблюдаются условия:

11. Определить оптимальное значение передаточного отношения редуктора из условия
 (2.22)
(2.22)
Если условие (2.22) не соблюдается, принять 
После выполнения геометрического расчета редуктора следует проверить двига-тель по тепловому режиму (для двигателей постоянного тока - обязательно):
Тном / Тср.кв.≥(1…1,08), где
 (2.23)
(2.23)
Б. Для систем, отрабатывающих ступенчатые входные воздействия в опти-мальном переходном режиме
(εнmax и ωнmax совпадают во времени)
Режим используется в системах дистанционного управления, в устройствах ввода данных, блоках сравнения и согласования и др.
Заданы: значения входного воздействия (угол перестановки) Θ, рад; время пере-ходного процесса t, с; момент инерции нагрузки Iн, кг·м2, статический момент нагрузки Т, Н·м; коэффициент плавности, принимаемый γ = 10...20.
Методика выбора электродвигателя,
1. Определить параметры оптимального переходного процесса:
максимальное угловое ускорение при пуске εнп = 5,02∙ θн/t2п;,
расчетную угловую скорость ωнmax = 3,6 ∙θн/tп.
2. Определить соотношение нагрузок:
 . (2.24)
. (2.24)
Если Тнс больше правой части неравенства (2.24), выбор параметров привода вы-полняют согласно пп.3-5 (ниже), если меньше - используют методику А (пп. 2; 9…11).
3. Определить динамические характеристики привода:
 (2.25)
(2.25)
 (2.26)
(2.26)
4. Выбрать двигатель, для которого
 и
и 
Предпочтение следует отдавать быстроходным двигателям сноминальной часто-той вращения ротора 6000 об/мин и более.
5. Определить оптимальное передаточное отношение редуктора
 . (2.27)
. (2.27)
В.- Для систем, отрабатывающих гармонический сигнал вида θ = θ0∙ sinωat.
Заданы: θ0 - амплитуда сигнала, рад; круговая частота,ωa= 2π/t, рад/с; Iн, кг∙м2;
Тнс, Н∙м; γ = 20...10, ηр.
Требование: применять двигатели с линейной или с линеаризуемой механической характеристикой (см. таблица 2.1, группа Г).
Методика выбора электродвигателя.
Определить характеристики управления по выходу:
Максимальная расчетная угловая скорость нагрузки:
 (2.28)
(2.28)
Нормальное угловое ускорение нагрузки:
 . (2.29)
. (2.29)
Нормальная угловая скорость нагрузки:
 (2.30)
(2.30)
2. Определить соотношение нагрузок:
 . (2.31)
. (2.31)
Если заданный статический момент Тнс больше динамического (правая часть не-равенства (2.31)), выбор параметров привода выполняют по пп.3-5, если меньше - по пп.6…9
3. Определить необходимые динамические характеристики двигателя  (2.32)
(2.32)
 . (2.33)
. (2.33)
4. Выбрать двигатель, для которого
 ;
;  .
.
5. Определить оптимальное значение передаточного отношения редуктора:
 . (2.34)
. (2.34)
6. Определить необходимую мощность двигателя, Вт:
 . (2.35)
. (2.35)
7. Выбрать двигатель, у которого Nном≥ Nном 0.
8. Определить оптимальное по быстродействию передаточное отношение редук-тора:
 (2.36)
(2.36)
9. Проверить условие обеспечения заданной максимальной угловой скорости: 
Если условиене выполняется, передаточное отношение редуктора
 (2.37)
(2.37)
Запас по скорости следует принимать тем больше, чем больше относительное зна-чение статической нагрузки.
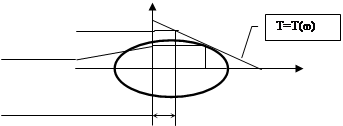 На рисунке 2.2 изображена нагрузочная характеристика привода
На рисунке 2.2 изображена нагрузочная характеристика привода  в поле механической характеристики двигателя
в поле механической характеристики двигателя  при гармоническом входном сигнале. ω
при гармоническом входном сигнале. ω
ір ∙ωнmax
ω A= ір ∙ωн A
ТТ T
 Т
Т
Рисунок 2.2
По относительному расположению значений  и
и  можно определить необходимое значение коэффициента запаса:
можно определить необходимое значение коэффициента запаса:
 (2.38)
(2.38)
3. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ОТНОШЕНИЙ В ЗУБЧАТЫХ МЕХАНИЗМАХ. С ЦИЛИНДРИЧЕСКИМИ И КОНИЧЕСКИМИ КОЛЕСАМИ.
3.1. Общее передаточное отношение механизма определяется по формуле:
 , (3.1)
, (3.1)
где  - общее передаточное отношение;
- общее передаточное отношение;
nдв - частота вращения вала заданного или выбранного электродвигателя, об/мин,
nвых - частота вращение выходного вала механизма, об/мин.
Значение nвых определяется на основании технического задания. При этом возмож-ны следующие варианты:
1. Значение nвых задано непосредственно в техническом задании.
2. Задана угловая скорость выходного ωвых рад/с:
 . (3.2)
. (3.2)
3.Задано время движения выходного вала tp, с. При отом угол поворота выходного вала  , либо задан либо может бытьназначен из конструктивных соображений. То
, либо задан либо может бытьназначен из конструктивных соображений. То
|
из
5.00
|
Обсуждение в статье: Б. Для систем, отрабатывающих ступенчатые входные воздействия в опти-мальном переходном режиме |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы