 |
Главная |


Выбор микроконтроллера
|
из
5.00
|
Введение
Микропроцессорные и информационно-управляющие системы, в настоящее время, стали одним из наиболее дешевых и быстрых способов обработки информации. Практически ни одна область современной науки и техники не обходиться без использования их.
В настоящее время всё острее встают проблемы безопасности. Практика показывает, что наибольшее число аварийных ситуаций возникает из-за ошибочных действий человека. В связи с этим большое значение имеет применение в системах управления технических средств позволяющих полностью автоматизировать этот процесс. Развитие микропроцессорных и информационно-управляющих систем позволило перейти на качественно новую элементную базу, которая в свою очередь повысила скорость и качество выполнения операций.
В течении четырех лет, начиная с 1976 г., фирмой INTEL разрабатывалось получившее широкое распространение семейство 8-и разрядных однокристальных микроконтроллеров с программным управлением MCS-48.
Вычислительные возможности первых однокристальных микроЭВМ были исчерпаны уже к началу 80-х гг. Встала задача разработки новых микроконтроллеров, обладающих расширенными функциональными ресурсами. Среди предложенных новых архитектур однокристальных микроЭВМ следует выделить 8-и разрядную архитектуру семейства микроконтроллеров MCS-51, предложенного фирмой INTEL в 1981 г. Она удовлетворяет всем требованиям, представляемым к однокристальным микроконтроллерам, и является наиболее применяемой.
Однако к настоящему времени значительную часть мирового рынка микропроцессорных средств составляет другой вид однокристальных контроллеров - это т.н. периферийные интерфейсные контроллеры или PIC. Они представляют собой высокопроизводительные БИС, в которые интегрированы помимо цифровых устройств (собственно микроконтроллера) также и аналоговые - это различные АЦП, компараторы, модули сравнения ШИМ и т.д. Это делает данные устройства чрезвычайно популярными у производителей «интеллектуальных» устройств.
Исходя из вышеперечисленного, разрабатываемая нами система управления барокамерой будет обладать следующими свойствами:
· Простота в установке, наладке и эксплуатации;
· Небольшие габариты;
· Небольшая стоимость;
· Обработка системой различных аварийных ситуаций;
Возможность получения информации о состоянии установки и технологического процесса с помощью ЭВМ.
Разработка аппаратного обеспечения
Функциональная схема микропроцессорной системы управления
Функциональная схема системы управления представлена на рисунке 1.
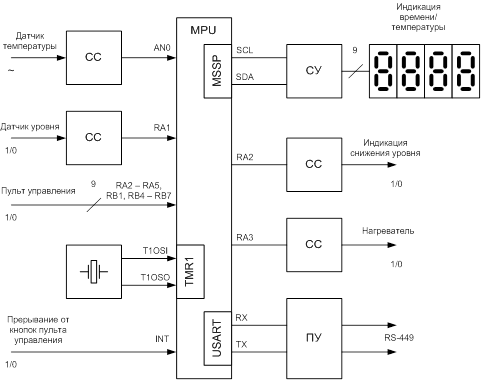
Рисунок 1 - Функциональная схема системы управления
На рисунке представлена функциональная схема системы управления, на которой указаны подключения к микроконтроллеру всех датчиков. При необходимости при подключении датчиков, для согласования сигналов, использовались схемы сопряжения (СС). Кроме того на схеме указано подключение к микроконтроллеру 4-х 7-сегментных светодиодных индикаторов через схему управления (СУ), подключенную к шине I2C и согласование микроконтроллера с интерфейсом RS-449. Также на схеме показаны все выходные сигналы, используемые для управления различными устройствами.
Выбор элементной базы
Выбор микроконтроллера
Таблица 1 - Наименование линий ввода / вывода микроконтроллера
| Датчики | Исполнительный механизм | Прочее | Тип линии |
| 1 (температуры) | - | - | Аналоговая |
| 1 (уровня) | - | - | Цифровая |
| - | 1 (нагреватель) | - | Цифровая |
| - | - | 9 (клавиатура) | Цифровая |
| - | - | 1 (прерывание от клавиатуры) | Цифровая |
| - | - | 2 (выводы тактового генератора таймера TMR1) | Цифровая |
| - | - | 2 (I2C) | Цифровая |
| - | - | 1 (индикация снижения уровня) | Цифровая |
| - | - | 2 (USART) | Цифровая |
Для обработки информации со всех датчиков и для управления всеми устройствами необходимо 20 линий ввода / вывода.
Контроллер должен иметь следующие периферийные модули:
1. Модуль АЦП для обработки сигнала от датчика температуры;
2. EEPROM память данных для хранения установок времени и температуры.
. Модуль USART для обеспечения возможности передачи данных из EEPROM во внешнее устройство.
. Модуль MSSP для управления индикаторами по шине I2С.
. Таймер TMR1 с отдельным генератором для формирования секундных импульсов.
. Таймер TMR2 для формирования временных задержек при опросе состояния кнопок.
В данной МПС используется микроконтроллер PIC16F873. Этот контроллер содержит все необходимые периферийные модули и имеет 22 линии ввода / вывода. Назначение выводов следующее:
RA0/AN0 - вход АЦП обработки сигнала от датчика температуры;
RC6/TX - выход передатчика USART;
RC7/RX - вход приемника USART;
RC0/T1OSO - выход генератора таймера TMR1;
RC1/T1OSI - вход генератора таймера TMR1;
RC3/SCL - шина синхронизации интерфейса I2C;
RC4/SDA - шина данных интерфейса I2C;
RB0/INT - вход прерываний по нажатию кнопок клавиатуры;
RA1 - RA5, RB1, RB4 - RB7 - цифровые порты ввода / вывода.
Микроконтроллеры семейства PIC имеют очень эффективную систему команд, состоящую всего из 35 инструкций. Все инструкции выполняются за один цикл, за исключением условных переходов и команд, изменяющих программный счетчик, которые выполняются за 2 цикла. Один цикл выполнения инструкции состоит из 4 периодов тактовой частоты. Каждая инструкция состоит из 14 бит, делящихся на код операции и операнд (возможна манипуляция с регистрами, ячейками памяти и непосредственными данными).
Высокая скорость выполнения команд в PIC-контроллерах достигается за счет использования двухшинной гарвардской архитектуры вместо традиционной одношинной Фон-Неймановской. Гарвардская архитектура основывается на наборе регистров с разделенными шинами и адресным пространством для команд и для данных. Набор регистров означает, что все программные объекты, такие как порты ввода / вывода, ячейки памяти и таймер, представляют собой физически реализованные аппаратные регистры.
|
из
5.00
|
Обсуждение в статье: Выбор микроконтроллера |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы