 |
Главная |


Разработка программного обеспечения МПС
|
из
5.00
|
Описание алгоритма работы устройства
Описание алгоритма работы главной программы main ().
При включении питания микроконтроллер начинает выполнение программы с функции main () в ней описаны команды инициализации контроллера: настройка АЦП, настройка таймера, конфигурация портов на ввод и на вывод, разрешение прерываний от порта В и таймера 0. Далее микроконтроллер зацикливается при помощи бесконечного цикла while (1).
Схема алгоритма обработки прерываний от таймера 0
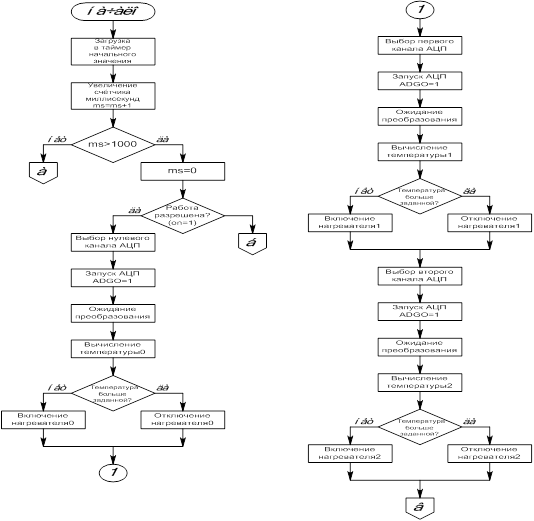

Схема алгоритма записи данных на LCD -дисплей

Схема алгоритма проверки готовности LCD -дисплея и чтения информации с него

Листинг программы
#include <pic.h>
#define uchar unsigned char
#define uint unsigned int
#define PORTBIT (adr, bit) ((unsigned) (&adr)*8+ (bit))bit RS @ PORTBIT (PORTC, 6);bit RW @ PORTBIT (PORTC, 5);bit E @ PORTBIT (PORTC, 4);on[5], s=5;ms, tzK, tzC, t0, t1, t2, t3, t4;
// ПаузаWait (uchar kk)
{(kk-);
}
// Читаем из индикатораReadInd(void)
{DATA;=0x0F; // на ввод 4 мл бита порта=1;
E=1;
DATA=(PORTC&&0x0F)<<4; // считываем 4 ст. бита
E=0;
E=1;
DATA=DATA||(PORTC&&0x0F); // считываем 4 мл бита
E=0;
RW=0;
return(DATA);
}
// Записываем в индикатор код
void WriteInd (uchar Dann)
{stDann, mlDann;=Dann&&0xF0; // старшие тетрады=Dann&&0x0F; // младшие тетрады=0;=0;=PORTC&&0xF0; // очищаем 4 мл бита порта С=PORTC||stDann; // передаём 4 ст бита=1;
E=0;
PORTC=PORTC&&0xF0; // очищаем 4 мл бита порта С
PORTC=PORTC||mlDann; // передаём 4 мл бита
E=1;
E=0;
TRISC=0x0F;
}
// Проверка готовности индикатора
void Check(void)
{
uchar DATA; // описали переменную DATA типа uchar
RS=0;
{=ReadInd();<<=1;
}
while(CARRY); // если бит переноса равен 1, то индикатор не готов
}WriteData (uchar kod)
{(20);();
RS=1;
WriteInd(kod); // записать в индикатор код
}
void WriteCommand (uchar kod)
{
Wait(20); // пауза (20 машинных циклов)
Check(); // проверить состояния индикатора
RS=0;
WriteInd(kod); // записать в индикатор код
RS=1;
}
// Вывод на дисплей
void Display(void)
{
WriteCommand(0x01); // (00000001) очистка экрана
// первая строка
WriteData(0x54); // (01010100) T(0x3D); // (00111101)=(0x30+tzC/1000); // тысячи(0x30+tzC % 1000/100); // сотни(0x30+tzC % 100/10); // десятки(0x30+tzC % 10); // единицы(0x2F); // (00101111) знак «/»(0x30+t[0]/1000); // тысячи(0x30+t[0]%1000/100); // сотни(0x30+t[0]%100/10); // десятки(0x30+t[0]%10); // единицы(0x2F); // (00101111) знак «/»(0x30+t[1]/1000); // тысячи(0x30+t[1]%1000/100); // сотни(0x30+t[1]%100/10); // десятки(0x30+t[1]%10); // единицы
// вторая строка
WriteData(0x27); // (00100111) знак «'» (градусы)
WriteData(0x43); // (01000011) C(0x30+t[2]/1000); // тысячи(0x30+t[2]%1000/100); // сотни(0x30+t[2]%100/10); // десятки(0x30+t[2]%10); // единицы(0x2F); // (00101111) знак «/»(0x30+t[3]/1000); // тысячи(0x30+t[3]%1000/100); // сотни(0x30+t[3]%100/10); // десятки(0x30+t[3]%10); // единицы(0x2F); // (00101111) знак «/»(0x30+t[4]/1000); // тысячи(0x30+t[4]%1000/100); // сотни(0x30+t[4]%100/10); // десятки(0x30+t[4]%10); // единицы(s==0) WriteCommand(0x8A); // (10001010) на 1ю стр. 11 поз.(s==1) WriteCommand(0x8F); // (10001111) на 1ю стр. 16 поз.(s==2) WriteCommand(0xC5); // (11000101) на 2ю стр. 6 поз.(s==3) WriteCommand(0xCA); // (11001010) на 2ю стр. 11 поз.(s==4) WriteCommand(0xCF); // (11001111) на 2ю стр. 16 поз.(s==5) WriteCommand(0x0C); // (00001100) курсор выключенWriteCommand(0x0E); // курсор включен
}
// Увеличение заданной температуры
void Up(void)
{++;(tzK>5000) tzK=5000;=tzK-273;
}
// Уменьшение заданной температуры
void Down(void)
{-;(tzK<300) tzK=300;=tzK-273;
}
// Обработка прерываний
interrupt INTR()
{
if (T0IF) // запрос прерывания от таймера
{
TMR0=0x84; // (10000100) загрузка в таймер начального значения
ms++; // отсчёт миллисекунд
if (ms>1000) // если миллисекунд больше 1000
{ms=0; // обнуление
if (on[0]) // если разрешено управление первым нагревателем
{
CHS0=0; CHS1=0; CHS2=0; // выбираем 1-й канал АЦП
ADGO=1; // запускаем АЦП
while (ADGO); // ждем пока АЦП закончит преобразование
t[0]=(ADRESL+ADRESH*256)*5000/1023; // вычисляем температуру
if (t[0]>tzK) RB0=0;
else RB0=1;
}
if (on[1]) // если разрешена работа вторым нагревателем
{=1; CHS1=0; CHS2=0;=1;(ADGO);[1]=(ADRESL+ADRESH*256)*5000/1023;(t[1]>tzK) RB1=0; else RB1=1;
}
if (on[2]) // если разрешена работа третьим нагревателем
{=0; CHS1=1; CHS2=0;=1;(ADGO);[2]=(ADRESL+ADRESH*256)*5000/1023;(t[2]>tzK) RB2=0; else RB2=1;
}
if (on[3]) // если разрешена работа четвертым нагревателем
{=1; CHS1=1; CHS2=0;=1;(ADGO);[3]=(ADRESL+ADRESH*256)*5000/1023;(t[3]>tzK) RB3=0; else RB3=1;
}
if (on[4]) // если разрешена работа пятым нагревателем
{=0; CHS1=0; CHS2=1;=1;(ADGO);[4]=(ADRESL+ADRESH*256)*5000/1023;(t[4]>tzK) RB4=0; else RC7=1;
}
Display();
}
T0IF=0; // сброс флага запроса прерывания от таймера
}
if (RBIF) // запрос прерывания от клавиатуры
{ // прерывание от клавиатуры(! RB7) {on[s]=! on[s]; t[s]=0;}(! RB6) Up();(! RB5) Down();(! RB4) {s=s+1; if (s>5) s=0;}=0; // сброс флага запроса прерывания от клавиатуры
Display();}
} // конец обработки прерываний
void main(void)
{TRISB=0xF0; // (11110000) конфигурация порта на ввод
TRISC=0; // конфигурация порта на вывод
WriteCommand(0x28); // (00101000)
WriteCommand(0x0С); // (00001100)
WriteCommand(0x06); // (00000110)
ADCON0=0x41; // (01000001) включение модуля АЦП, частота Fosc/8;
ADCON1=0x82; // (10000010) // включаем 5 каналов АЦП
while (1);}
Заключение
микроконтроллер электронагреватель полимер управление
При выполнении данного проекта была изучена архитектура микроконтроллера PIC16F876 фирмы Microchip и построена на его основе микропроцессорная система управления электронагревателями печи обработки полимеров. При этом также был изучен текстовый жидкокристаллический дисплей WH1602A-YYK-CP фирмы Winstar и встроенный в него контроллер HD44780. Приобретены навыки программирования микропроцессорных систем и построения на их основе устройств сбора и обработки информации. Так же был изучен кросс-компилятор HI-TECH С for Microchip PIC v7.85.
|
из
5.00
|
Обсуждение в статье: Разработка программного обеспечения МПС |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы