 |
Главная |


Предварительная подготовка включает выбор маршрута, подготовку исходных данных для движения и ориентирование машины на начальной точке маршрута. 1 страница
|
из
5.00
|
Маршрут движения выбирают по карте с учетом проходимости местности, ее защитных и маскировочных свойств. Расстояния между точками поворота могут быть 5 - 10 км при движении днем и 3 - 5 км при движении ночью. Вариант оформления маршрута на карте показан на рис.

Рис. Оформление маршрута на карте для выдерживания направления движения по
Гирополукомпасу.
Магнитные азимуты направлений движения между точками поворота определяют по карте с точностью до 1  (около 0-20), а расстояния – до 1 мм в масштабе карты. При движении по холмистой местности и в горах в измеренные по карте расстояния вводят поправку за рельеф. При отсутствии карты экипаж готовит (или получает) при наобходимости схему маршрута с исходными данными. На схеме отмечают промежуточные ориентиры, труднопроходимые участки и различные препятствия.
(около 0-20), а расстояния – до 1 мм в масштабе карты. При движении по холмистой местности и в горах в измеренные по карте расстояния вводят поправку за рельеф. При отсутствии карты экипаж готовит (или получает) при наобходимости схему маршрута с исходными данными. На схеме отмечают промежуточные ориентиры, труднопроходимые участки и различные препятствия.
Если маршрут состоит из одного звена (при преодолении реки по дну, движении в атаку и т.п.), направление движения может быть определено непосредственно на местности с помощью магнитного компаса.
Ориентирование машины на начальной точке маршрута включает определение магнитного азимута ее продольной оси и установку этого угла на курсовой шкале гирополукомпаса. Его чаще всего выполняют с помощью магнитного компаса. На расстоянии 40 - 50 м от машин определяют компасом магнитные азимуты направлений вдоль ее бортов (рис.).
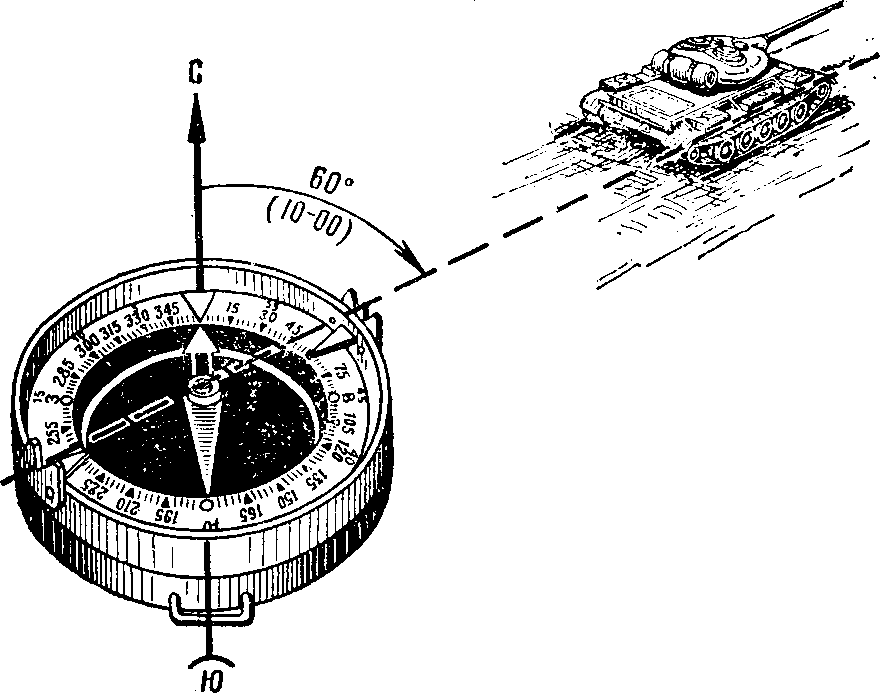
Рис. Ориентирование машины с помощью компаса на исходном и промежуточных
пунктах маршрута
За окончательную величину принимают среднее значение из двух измерений. Полученный магнитный азимут продольной оси машины устанавливают на курсовой шкале прибора при включенном гирополукомпасе. Затем машину медленно поворачивают так, чтобы указатель отсчета установился против отсчета на курсовой шкале, равного значению магнитного азимута направления движения на первом участке маршрута.
Начальное ориентирование машины может быть выполнено по линейному ориентиру, направлению на ориентир и Полярной звезде.
По линейному ориентиру машину ориентируют следующим образом. На исходной точке машину устанавливают вдоль линейного ориентира. При отсчете на угломерном устройстве 0-00 - (30-00) машину медленно поворачивают до тех пор, пока центральная марка прицепа (перекрестие) не будет направлена точно вдоль линейного ориентира. При таком положении машины на шкале гирополукомпаса устанавливают заранее определенное по карте значение магнитного азимута (дирекционного угла) направления линейного ориентира. После этого, машину медленно поворачивают, пока указатель отсчета не установится на курсовой шкале против значения магнитного азимута (дирекционного угла) направления движения.
По направлению на ориентир машину ориентируют так же, как и по линейному ориентиру. При отсчёте на башенном угломере 0-00 (или 30-00) постепенным поворотом машины совмещают центральную марку прицела (или перекрестие визирного устройства) с направлением на ориентир. Затем на курсовой шкале гирополукомпаса устанавливают значение заранее определённого по карте магнитного азимута или дирекционного угла направления на этот ориентир.
По Полярной звезде машину ориентируют так же, как и по направлению на ориентир. Для этого замечают естественный или выставляют искусственный ориентир в направлении проектирования Полярной звезды на линию горизонта. При отсчёте 0-00 (или 30-00) по башенному угломеру добиваются совмещения центральной марки прицела (или перекрестия визирного устройства) с направлением на ориентир. На курсовой шкале гирополукомпаса устанавливают значение магнитного склонения, которое определяется по карте, затем машину медленно поворачивают до тех пор, пока на курсовой шкале на установится отсчёт, равный магнитному азимуту направления движения. Если движение совершают по дирекционным углам, то вначале на курсовой шкале устанавливают отсчет, равный сближению меридианов или нулю, когда сближение меридианов меньше одного градуса.
Точность начального ориентирования машины по компасу и Полярной звезде при тщательном выполнении приемов составляет около 3 . При определении магнитных азимутов (дирекционных углов) по карте и ориентированию машины по линейному ориентиру и направлению на ориентир точность начального ориентирования машины около 1 .
При значительной протяженности маршрута рекомендуется через каждые 1 - 2 ч движения уточнять курс, то есть переориентировать машину одним из изложенных выше способов.
Выдерживание направление движения с помощью гирополукомпаса аналогично выдерживанию направления при движении по азимутам; машина движется по прямым линиям от ориентира (точки поворота маршрута) до ориентира, при этом надо стремиться вести машину так, чтобы на протяжении всего участка маршрута от исходной точки поворота отсчет на курсовой шкале сохранялся неизменным. Пройденное расстояние между точками определяют по спидометру.
При движении вне дорог часто приходится объезжать воронки, ямы и другие небольшие по размеру препятствия. Чтобы не отклониться от намеченного маршрута, объезд таких препятствий выполняется поочередно справа и слева. Таким образом, путь движения до очередной точки поворота будет представлять волнистую линию.
Пройдя намеченное расстояние, находят ориентир (точку поворота), на котором машину поворачивают до тех пор, пока на курсовой шкале не установится отсчет, равный величине магнитного азимута или дирекционного угла направления на следующую точку поворота.
Перед началом объезда больших препятствий на курсовой шкале устанавливают нулевой отсчет. Машину поворачивают на 90 до установки на курсовой шкале отсчета, равного 15-00 (45-00), записывают показания спидометра и начинают движение. Так же выполняют повороты и на последующих точках. При выходе машины на линию первоначального направления движения ее поворачивают до установки на курсовой шкале отсчёта, равного нулю. Расстояние при дальнейшем движении считывают по спидометру с учетом пройденного при объезде.
Точность выдерживания маршрута.
Величина ошибки выдерживания направления движения зависит от ошибок определения по карте исходных данных (магнитных азимутов и расстояний), первоначального ориентирования машины, определения расстояния по спидометру и от ухода главной оси гироскопа от первоначально заданного направления. Средняя ошибка выдерживания маршрута при движении в одном направлении при тщательной работе с гирополукомпасом не превышает 2 % пройденного расстояния. Если маршрут движения имеет несколько точек поворота, величина ошибки за 1 ч движения обычно составляет около 5 % пройденного расстояния.
Использование гирополукомпаса при управлении подразделением.
На марше при ограниченной видимости и ночью, при выдвижении на исходный рубеж и в движении в атаку на курсовых шкалах гирополукомпасов боевых машин устанавливают одинаковое значение курса. Обычно оно равно нулю. При необходимости развернуть одновременно все боевые машины в определенном направлении следует подать команду, указывающую курс, например, «Всем, курс 12-00». Механики-водители поворачивают машины до установки на курсовых шкалах этого отсчета и продолжают движение.
Принципы работы и устройство навигационной аппаратуры
с координатором.
Навигационная аппаратура с координатором позволяет решать три задачи:
определение текущих координат Хт и Ут движущейся машины и дирекционного угла  т ее продольной оси (курса);
т ее продольной оси (курса);
вычисление текущего дирекционного угла и тп на пункт назначения и расстояния до него по разностям координат  и
и  ;
;
вычисление координат  ц и Уц наблюдаемых объектов и целей.
ц и Уц наблюдаемых объектов и целей.
Принцип решения первой задачи основан на разложении отрезков  S (рис.) пути на составляющие по координатным осям (
S (рис.) пути на составляющие по координатным осям (  и ) и последующем их суммировании. Разложение отрезков пути на составляющие выполняется по математическим зависимостям:
и ) и последующем их суммировании. Разложение отрезков пути на составляющие выполняется по математическим зависимостям:  ;
;
 ,
,
где и элементарные приращения прямоугольных координат, выработанных координатором при прохождении машиной отрезка пути S с дирекционным углом .

Рис. Принцип определения координат местоположения машины
с помощью координатора.
Вычисляемые координатором приращения координат непрерывно суммируются с исходными координатами. Таким образом, текущие координаты движущейся машины в какой-либо точке N будут равны алгебраической сумме координат исходной точки маршрута и приращений координат, вычисленных аппаратурой в процессе движения:
 ;
;
 .
.
Вторая задача заключается в определении дирекционного угла  направления на пункт назначения и расстояния Sпн до него (рис. 9.7,
направления на пункт назначения и расстояния Sпн до него (рис. 9.7,  а) по
а) по
 ,
,  координат
координат  ,
,  пункта назначения и текущих координат хт, ут:
пункта назначения и текущих координат хт, ут:
 ;
;  ,
,
где  ,
,  .
.
В некоторых модификациях координатора вычисляются и отмечаются на соответствующих шкалах вместо расстояния Sпн разности пн и пн (рис. 8.8, б)между разностью  и координат пункта назначения и исходного пункта и разностью т и т, текущих координат и координат исходной точки:
и координат пункта назначения и исходного пункта и разностью т и т, текущих координат и координат исходной точки:

 .
.
Таким образом, при приближении машины к пункту назначения разности пн и пн будут уменьшаться. По прибытии на пункт назначения они будут равны нулю. Это позволяет выходить в указанную координатами точку на топографической карте в любых условиях видимости с точностью ± 200 м (одно деление шкалы барабана).
Третья задача решается аппаратурой с координатором цели. Зная текущие координаты машины и дирекционный угол ее продольной оси, измеряют дальномером расстояние Sц до цели и угол визирования на нее с помощью угломерного устройства машины. Эти данные вводят в координатор цели. Задача решается по математическим зависимостям:
Датчик пути – электромеханический прибор, состоящий из индуктивного преобразователя и двух формировательно-усилительных каналов. Он соединен с ходовой частью машины гибким валиком. В движении энергия вращающегося валика преобразуется датчиком в электрические импульсы. Частота их следования пропорциональна скорости движения. Импульсы с определенной дискретностью и знаком (при движении вперед или назад) поступают в координатор на устройство корректуры пути, где в зависимости от установленной величины корректуры число их изменяется. Откорректированные таким образом электрические импульсы передаются в координатор на входное устройство разложения.
В некоторых модификациях аппаратуры устанавливают электронные датчики пути.
Электронный датчик – радиотехническое устройство, обеспечивающее определение пройденного пути без кинематической связи с ходовой частью машины. В состав датчика входят высокочастотное устройство, станция усиления, преобразователь, пульт управления и датчик крена машины.
Принцип работы датчика основан на использовании эффекта Доплера, который заключается в изменении частоты сигнала при относительном перемещении источника и приемника излучения.
Высокоточное устройство излучает сигналы определенной частоты, направленные узким пучком к поверхности Земли, и принимает сигналы, отраженные от ее поверхности. Если машина неподвижна, частота принятого сигнала равна частоте излученного сигнала. В движении частота отраженного от земной поверхности сигнала отличается от частоты излученного датчиком сигнала на некоторую величину, пропорциональную скорости движения машины. В станцию усиления кроме импульсов, отраженных от земной поверхности, поступают импульсы от датчика крена машины, то есть данные о рельефе местности. Сформированный сигнал о пройденном машиной пути передается на преобразователь, где он преобразуется в угол поворота выходного вала датчика, который связан с гибким валиком с координатором.
Электронный датчик используется при скорости движения свыше 3 км/ч. При меньшей скорости датчик отключается и данные о пройденном пути поступают в координатор от электромеханического датчика.
Координатор – счетно-решающий прибор, непрерывно вырабатывающий в пути прямоугольные координаты местоположения и курс машины, а также дирекционный угол направления на пункт назначения и оставшегося до него расстояния по приращениям координат.
Вспомогательные приборы и инструменты.
К вспомогательным приборам и инструментам в комплекте навигационной аппаратуры относятся перископическая артиллерийская буссоль ПАБ-2А с азимутальной насадкой АНБ-1, хордоугломер, поперечный масштаб и циркуль-измеритель. В некоторых комплектах имеются гирокомпасы.
Вспомогательные приборы и инструменты предназначены для определения прямоугольных координат и исходного дирекционного угла (курса) при начальном ориентировании машины в исходном пункте и на контрольных точках.
При определении исходного дирекционного угла продольной оси машины пользуются также визирным устройством, с помощью которого определяют величину горизонтального угла между продольной осью машины и направлением на какой-нибудь местный предмет. Этот угол называется углом визирования. Он измеряется по ходу часовой стрелки и может иметь значения от 0 до 360 .
Подготовка карты и навигационной аппаратуры с координатором для ориентирования на местности.
Подготовка к ориентированию на местности с помощью навигационной аппаратуры с координатором включает изучение маршрута движения, подготовку рабочей карты, определение исходных данных и начальное ориентирование машины на исходном пункте маршрута.
Изучение маршрута движения и подготовка рабочей карты. При ориентировании на местности с помощью координатора чаще всего используют карту масштаба 1:100000 или 1:200000. По ней намечают маршрут движения с учетом проходимости местности, ее защитных и маскировочных свойств. Затем оформляют маршрут на карте.
В качестве исходного пункта выбирают хорошо видимую на местности и нанесенную на карту четко выраженную контурную точку (перекресток дорог или просек, мост или дорожную трубу, геодезический пункт, угол леса и т.п.), на которую можно наехать (или подъехать вплотную) при начальном ориентировании машины.
Длину маршрута измеряют курвиметром или циркулем-измерителем. Около основных ориентиров подписывают расстояние в километрах нарастающим итогом от исходного пункта, а на участках, где ориентирование затруднено и направление движения придется выдерживать по курсоуказателю, определяют и подписывают дирекционные углы направлений. Кроме того, определяют и подписывают полные прямоугольные координаты исходного пункта и пункта назначения. Первый ориентир по маршруту намечают в 2 - 3 км от исходного пункта и используют в качестве контрольной точки для контроля работы аппаратуры. Затем по всему маршруту около основных ориентиров (примерно через 2030 км) подписывают сокращенные координаты из пяти цифр, которые будут на счетчиках Х и У при подъезде к этим ориентирам.
Вдоль маршрута целесообразно поднимать оцифровку километровых линий. Это дает возможность, не разворачивая склейку карт, быстро определять свое местоположение на карте по координатам, снятым со шкал прибора.
Определение исходных данных.
Исходными данными для работы с координатором служат: полные прямоугольные координаты хисх и уисх исходного пункта маршрута и его географическая широта (разности координат между пунктом назначения и исходным пунктом  и
и  ; коэффициент корректуры пути К; дирекционный угол
; коэффициент корректуры пути К; дирекционный угол  ориентирного направления (продольной оси машины на исходном пункте) и дирекционный угол направления на пункт назначения
ориентирного направления (продольной оси машины на исходном пункте) и дирекционный угол направления на пункт назначения  .
.
Координаты и дирекционный угол измеряют с графической точностью по карте масштаба 1:50000 и крупнее, пользуясь циркулем-измерителем, поперечным масштабом и хордоугломером.
Географическую широту исходного пункта считывают с карты, округляя до целого числа градусов.
Величину корректуры пути определяют контрольным проездом измеренного по карте прямолинейного участка маршрута на местности, характерной для района предстоящих действий. Отсчет, который необходимо установить на шкале КОРРЕКТУРА ПУТИ, рассчитывают по формуле
 %,
%,
где  —отсчет по счетчику координатора после проезда измеренного участка;
—отсчет по счетчику координатора после проезда измеренного участка;
S—длина участка маршрута, измеренного по карте.
При движении на равнинной местности по грунтовым дорогам или по снежной целине глубиной 15 - 20 см величина корректуры пути обычно не превышает для гусеничных машин 3 %, для колесных 5 %. На холмистой местности и в горах она возрастает на 2 - 5 %.
Если условия обстановки не позволяют определить корректуру пути заранее, на шкале устанавливают приближенное значение с учетом характера местности, а на первой контрольной точке маршрута уточняют величину корректуры пути.
Дирекционный угол направления на пункт назначения измеряют по карте с точностью 0-50 или рассчитывают по формуле
 .
.
Этот угол используется для контроля работы аппаратуры и ввода в координатор разностей координат.
При большой протяженности маршрута движения заранее определяют по карте исходные данные для переориентирования машины в районах привалов.
Все исходные данные записывают на карте с учетом особенностей ввода их в аппаратуру при начальном ориентировании машины.
Если переключатель масштабов находится в положении 1 м, то на шкалах Х и У координатора устанавливают сокращенные прямоугольные координаты: десятки и единицы километров, сотни, десятки и единицы метров. При положении переключателя 10 м на шкалах Х и У устанавливают сотни, десятки и единицы километров, сотни и десятки метров. Тысячи километров с левой стороны в значениях координат и единицы метров с правой стороны исключают.
Разности координат  и
и  устанавливают на шкалах с точностью 0,2 км.
устанавливают на шкалах с точностью 0,2 км.
Движение по азимутам днем. Выдерживание направления на указанный ориентир, обход препятствий.
Уверенное ориентирование на местности по карте в движении во многом зависит от подготовки к ориентированию. В зависимости от характера местности на марше ориентируются, как правило, по карте масштаба 1:100000 или 1:200 000.
Подготовка к ориентированию включает выбор, изучение маршрута, подъем его на карте установленным порядком, измерение протяженности маршрута и отдельных его участков, а также азимутов направлений на участках, где ориентирование затруднено, проверку исправности компаса (гирополукомпаса) и спидометра.
Выбор и изучение маршрута. Маршрут движения выбирают по карте с учетом условий обстановки, проходимости, защитных и маскировочных свойств местности. Предпочтение отдают дорогам с твердым покрытием, на которых меньше мостов и путепроводов. При выборе маршрута учитывают возможность затопления полотна дороги при разрушении плотин на реках и водохранилищах. Изучают и планируют пути объезда мостов, путепроводов и мест затопления.
Маршрут и прилегающую к нему местность в полосе 3 - 5 км изучают по карте с привлечением по возможности аэрофотоснимков, разведывательных данных и других материалов.
Вначале просматривают на карте весь маршрут, уясняют характеристики дорог и особенности прилегающей к ним местности, наличие придорожных сооружений, которые могут служить надежными ориентирами. Особенно тщательно изучают места поворотов маршрута, перекрестков и развилок дорог, въездов в населенные пункты и выездов из них.
По всему маршруту через 5 - 10 км выбирают контрольные ориентиры - наиболее устойчивые объекты местности, легко опознаваемые при подъезде к ним. Контрольные ориентиры выбирают в местах, где особенно важно убедиться в правильности выдерживания направления движения (на перекрестках и
развилках дорог, поворотах маршрута, выходах из населенных пунктов и т.п.).
Подъем маршрута на карте и измерение его протяженности.
Маршрут на карте поднимают цветным карандашом коричневого цвета, контрольные ориентиры обводят кружками (рис.).  Оформление маршрута движения на карте:
Оформление маршрута движения на карте:
а – правильно, б – неправильно.
Вдоль маршрута (дороги с твердым покрытием) проводят сплошную линию, которая не должна закрывать условный знак дороги, а также по возможности условные знаки ориентиров вдоль нее. Колонный путь поднимают на карте прерывистой линией.
Расстояния между контрольными ориентирами измеряют с учетом поправки за рельеф и извилистость маршрута и подписывают около обозначений ориентиров нарастающим итогом от исходного пункта. На исходном пункте перед началом движения эти расстояния переводят в показания спидометра и подписывают на карте около обозначений у контрольных ориентиров.
При подготовке к движению в условиях, неблагоприятных для ориентирования, определяют и подписывают на карте магнитные азимуты направлений движения по маршруту, чтобы можно было быстро перейти к ориентированию в пути по компасу (гирополукомпасу).
Ориентирование в пути. Во время движения карту держат перед собой ориентированной, постоянно сличают ее с местностью, следят за проездом намеченных ориентиров, сверяя показания спидометра.
На марше к карте обязательно обращаются при подходе к перекрестку или развилке дорог. Примерно за 200 - 500 м до поворота водителю указывают место предстоящего поворота и направление дальнейшего движения, например: «Через 300 м поворот направо на просеку».
При въезде в лес или на участок, где мало ориентиров, записывают показания спидометра. Это позволяет в любой момент определить свое местоположение по пройденному расстоянию.
К наблюдению за ориентирами в пути, особенно при движении ночью, обычно привлекают всех членов экипажа. Для этого их предварительно знакомят с маршрутом движения, а в ходе марша заранее предупреждают о предстоящем появлении ориентира.
Таким образом осуществляется непрерывное ориентирование, которое обеспечивает правильность выдерживания указанного направления движения.
При необходимости объезда встретившихся на маршруте районов пожаров, завалов, затоплений и участков заражения местности направления движения чаще всего выдерживают по азимутам. В этих случаях перед препятствием точно определяют свое местоположение и записывают показание спидометра. Затем изучают по карте характер местности и намечают с учетом ее проходимости путь объезда обычно вдоль линейных ориентиров (по просекам, вдоль рек и т.д.). Намеченный маршрут на карте поднимают тонкой линией, измеряют его протяженность, определяют магнитные азимуты направлений между пунктами поворота.
При движении по автострадам, усовершенствованным шоссе легко ориентироваться по путевым дорожным знакам (указателям наименований пунктов, расстояний до населенных пунктов по маршруту и в стороне от него, маршрутным маркам, указывающим номера дорог и т.п.). Однако в боевых условиях дорожные знаки могут быть преднамеренно переставлены или заменены другими сложными подписями. Поэтому на маршруте необходимо всегда контролировать свое местоположение и направление движения по карте.
Движение по азимутам – это основной способ ориентирования на местности, бедной ориентирами, особенно ночью и при ограниченной видимости.
Сущность его заключается в выдерживании на местности направлений, заданных магнитными азимутами, и расстояний, определенных по карте между поворотными пунктами намеченного маршрута. Направления движения выдерживают с помощью компаса, расстояния измеряют шагами или по спидометру.
Исходные данные для движения по азимутам (магнитные азимуты и расстояния) определяют по карте, а время движения – по нормативу и оформляют в виде схемы (рис.) или вписывают в таблицу (табл.). Данные в таком виде выдают командирам, которые не имеют топографических карт. Если командир имеет свою рабочую карту, то исходные данные для движения по азимутам он оформляет непосредственно на рабочей карте.
Маршрут движения по азимутам выбирают с учетом проходимости местности, ее защитных и маскировочных свойств, чтобы он обеспечивал в боевой обстановке быстрый и скрытный выход к указанному пункту.

Рис. Схема для движения по азимуту.
В маршрут обычно включают дороги, просеки и другие линейные ориентиры, которые облегчают выдерживание направления движения. Поворотные пункты выбирают у ориентиров, легко опознаваемых на местности (например, постройки башенного типа, перекрестки дорог, мосты, путепроводы, геодезические пункты и т. п.).
Опытным путем установлено, что расстояния между ориентирами на поворотных пунктах маршрута не должны превышать 1 км при движении днем в пешем порядке, а при движении на машине – 6–10 км.
Для движения ночью ориентиры намечаются по маршруту чаще.
Чтобы обеспечить скрытный выход к указанному пункту, маршрут намечают по лощинам, массивам растительности и другим объектам, обеспечивающим маскировку движения. Необходимо избегать передвижений по гребням возвышенностей и открытым участкам.
|
из
5.00
|
Обсуждение в статье: Предварительная подготовка включает выбор маршрута, подготовку исходных данных для движения и ориентирование машины на начальной точке маршрута. 1 страница |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы