 |
Главная |


Функциональная схема автоматического управления
|
из
5.00
|
Введение
Основная цель учебной практики приобрести практический опыт составления типовой модели АСР (автоматической системы регулирования) с использованием информационных технологий. Провести анализ системы автоматического управления с учетом специфики технологических процессов. Выбрать приборы и средства автоматизации с учетом специфики технологического оборудования. Составить схемы специализированных узлов, блоков, устройств и систем автоматического управления с использованием информационных технологий.
Основная часть
Анализ и описание технологического процесса, подлежащего автоматизации
В водоснабжении используют водонасосные установки трех типов: башенные с водонапорным баком, безбашенные с водонапорным котлом и непосредственной подачей воды в водопроводную сеть. Почти в 90 % случаев используют башенные водонасосные установки с расходом воды до 30 м3/ч. Если расход воды составляет 30...б5м3/ч, то рекомендуют двухагрегатные насосные станции с водонапорным котлом. При расходе воды более 65 м3/ч экономически целесообразно использовать насосные установки с непосредственной подачей воды в распределительную сеть.
Безбашенная автоматическая водоподъемная установка типа ВУ предназначена для подъема воды из открытых водоемов и шахтных колодцев при напоре 25...80 м. Установка состоит из всасывающей трубы с приемным фильтром насосного агрегата, нагнетательной и водоразборной труб с запирающими вентилями, воздушно-водяного бака с датчиком давления и струйным регулятором запаса воздуха, имеющего камеру смешивания, воздушный клапан, жиклер и диффузор.
Актуальность процесса заключается:
· поддержание заданного давления на выходе системы в автоматическом режиме вне зависимости от изменения расхода воды и давления на входе;
· равномерную выработку ресурса насосов за счёт чередования их работы;
· защита насосов от перегрузок, пропадания фазы, коротких замыканий, «сухого хода»;
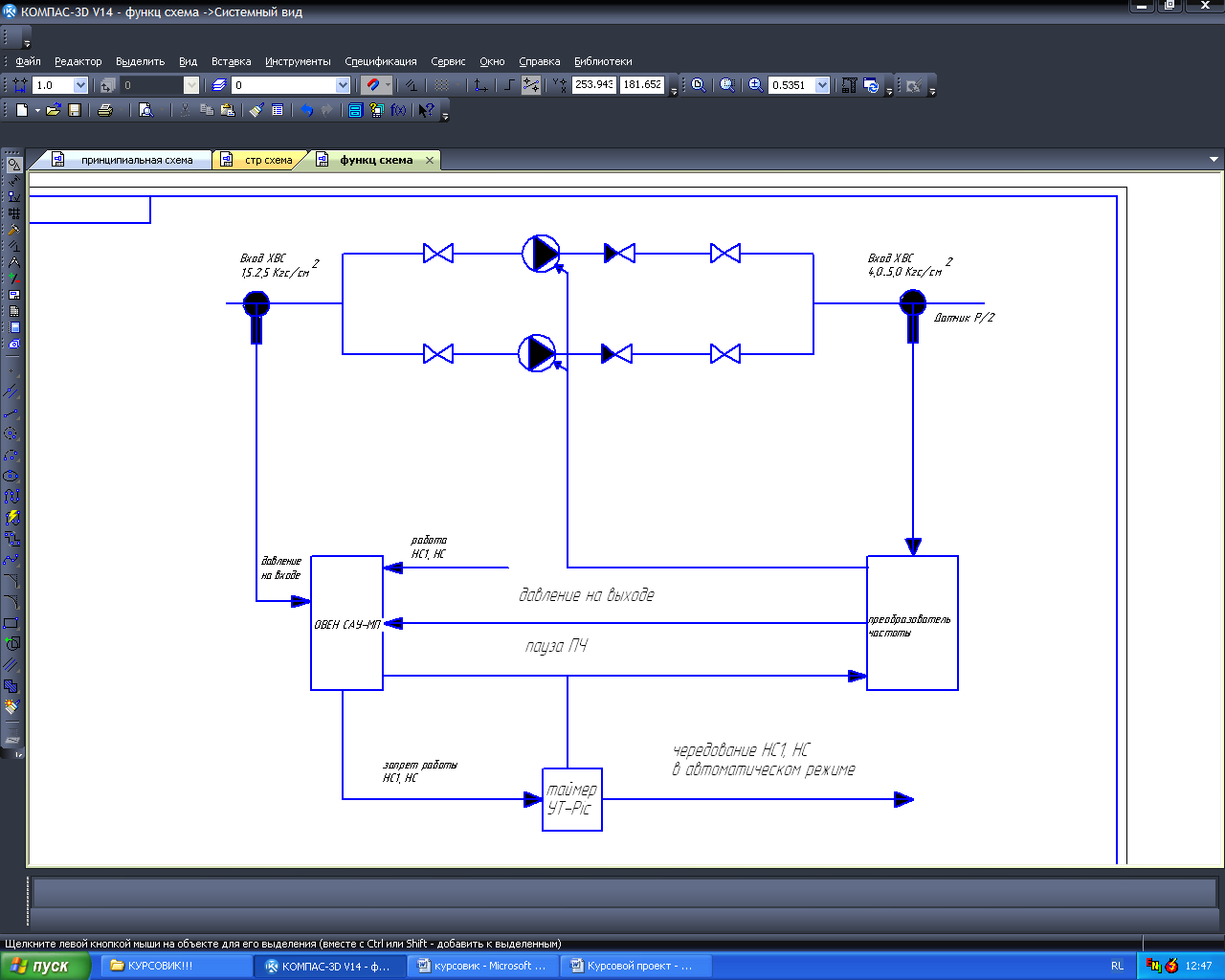
Рисунок 1.1 – Блок-схема управления насосами.
Структурная схема автоматического управления
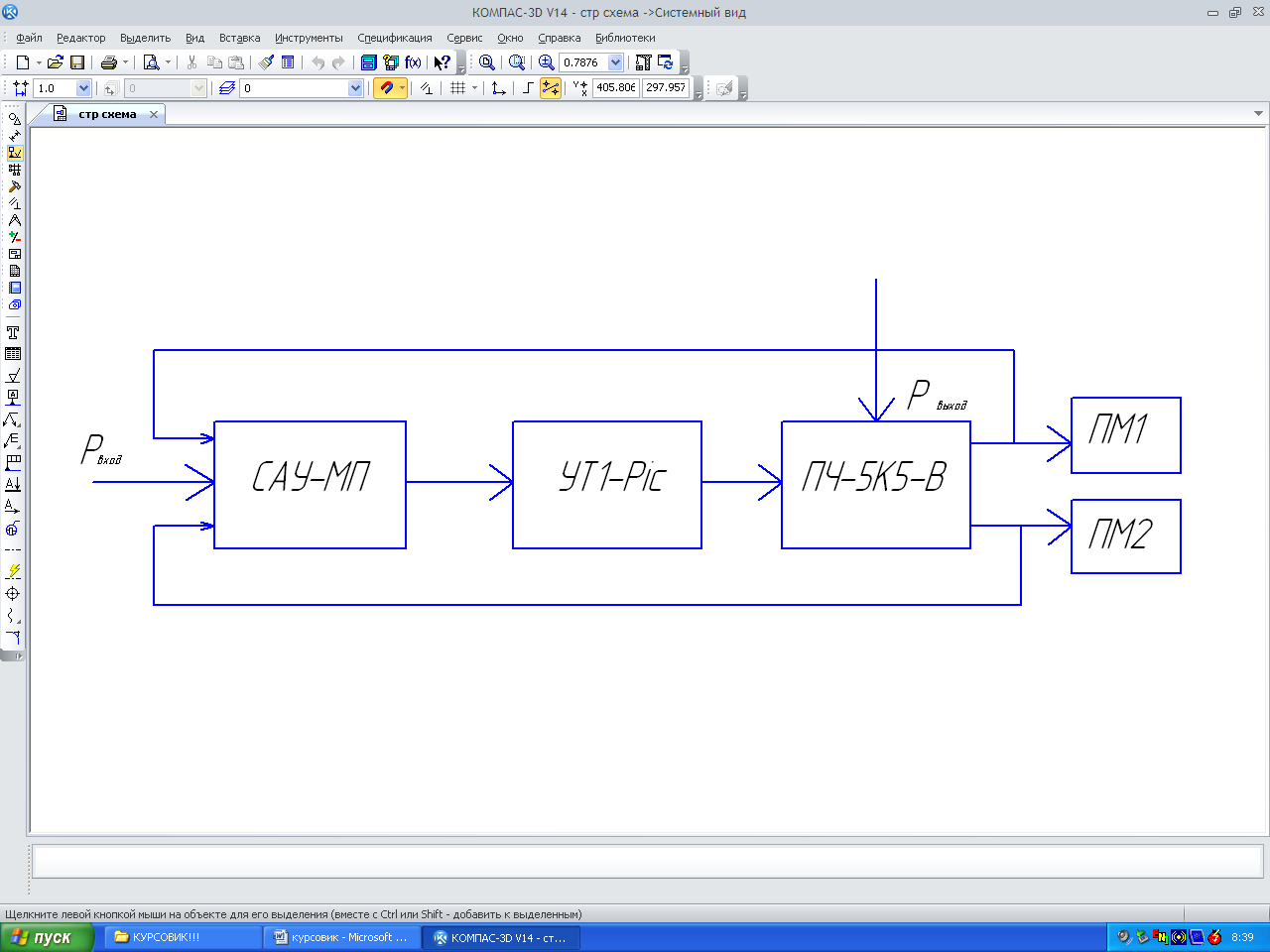
Рисунок 1.2 – Структурная схема автоматического управления насосами.
Замеряется давление на входе и выходе, сигнал этих измерений подается на микропроцессорный контроллер САУ-МП. УТ1 определяет время включения и выключения насосов, преобразователь частоты включает магнитные пускатели (ПМ1, ПМ2).
Функциональная схема автоматического управления.
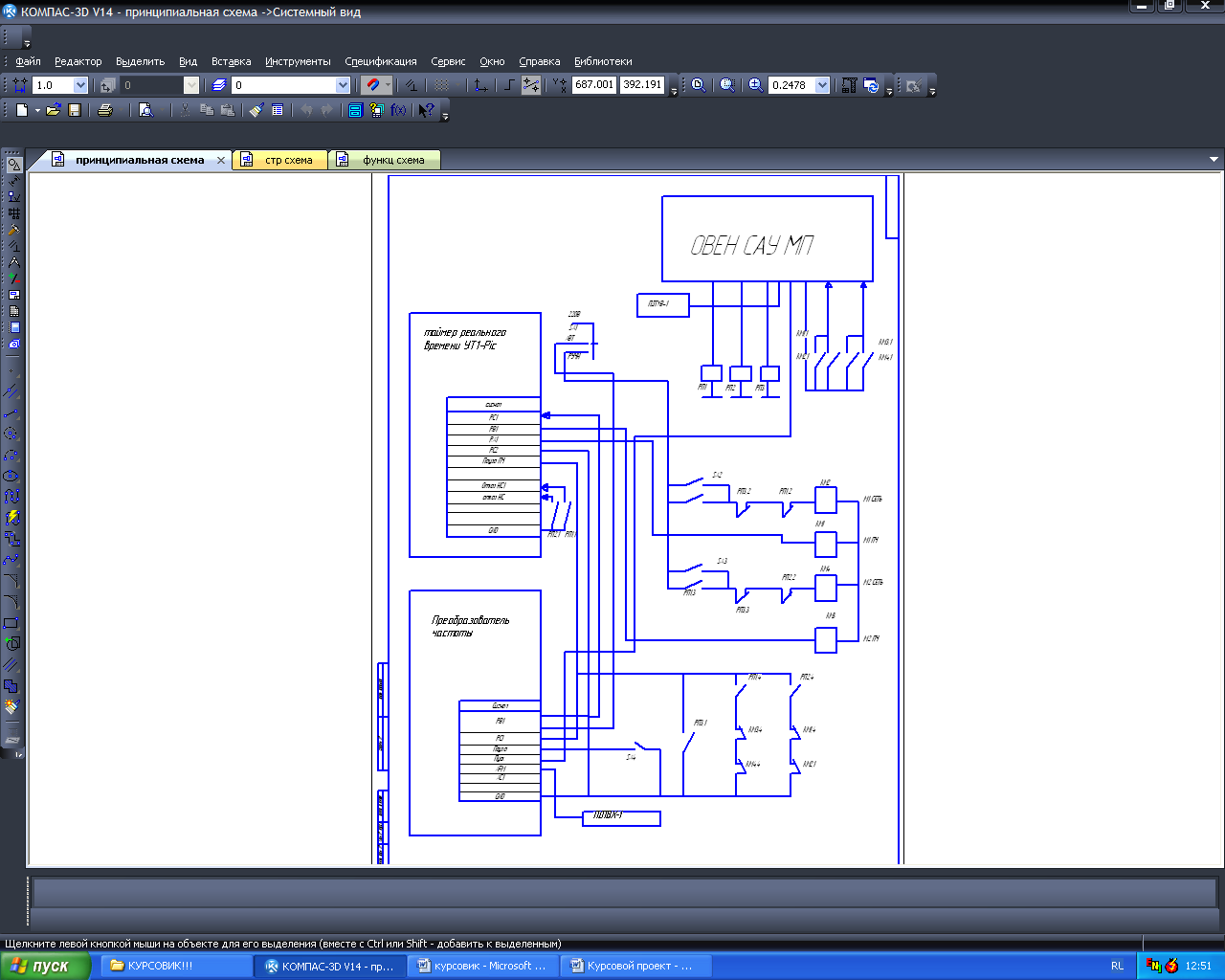
Рисунок 1.3 – Функциональная схема автоматического управления
В состав станции управления СУН-АТ входят: преобразователь часто- ты (ПЧ), логический контроллер для управления системой подающих насосов ОВЕН САУ-МП, таймер реального времени ОВЕН УТ1-PiC, а также силовая, коммутационная и сигнальная аппаратура. Каждый блок контролирует свой участок технического процесса и обеспечивает безаварийную работу станции. Частотное регулирование является самым удобным и выгодным способом изменения производительности насоса. Логический контроллер ОВЕН САУ-МП управляет насосной установкой в системах водоснабжения в автоматическом режиме, что особенно актуально при оснащении ими жилых зданий, где отсутствует оперативный персонал. Таймер реального времени ОВЕН УТ1-PiC предназначен для управления насосными агрегатами в регулируемом режиме (чередование включения насосов). Конструктивно станция выполнена в виде шкафа с габаритами 600×500×220 мм, имеющего степень защиты IP54. На входном и выходном коллекторах насосной установки стоят датчики давления PV1 и PV2 типа ПДТВХ или КРТ.
Для реализации схемы автоматизации специалистами компании ОВЕН была создана эксклюзивная логика для прибора САУ-МП. Рассмотрим более подробно работу станции в автоматическом режиме, когда переключатель SA1 находится в положении «Автомат». После подачи питания САУ-МП анализирует сигнал с датчика давления PV1, контролирующего давление воды на входе, и если оно ниже уставки давления Р1 (минимально допустимое давление воды на входе), выдаёт команду «Пауза», запрещающую работу насосов. Если давление на входе больше уставки Р1, то САУ-П включает режим ожидания. Пуск насоса производится с помощью переключателя SA4. В штатном режиме, т.е. при отсутствии аварийных ситуаций в преобразователе частоты, контакты внутреннего реле RB1 и RC1 замкнуты. Напряжение 220 В через контакты внутреннего реле R1 таймера УТ1-PiC поступает на катушки контакторов КМ1 или КМ2. При замыкании контактов КМ1.1 или КМ3.1 контроллер САУ-МП отрабатывает задержку включения, затем проверяет сиг- нал c датчика давления PV2, по которому оценивается наличие минимально допустимого давления воды на выходе установки. Сигнал транслируется от датчика давления PV2 через аналоговый выход преобразователя частоты, и если он ниже уставки Р2 (минимально допустимое давление воды на выходе), выдает команду «Отказ». Если давление на выходе больше Р2, то контроллер САУ-МП остается в рабочем режиме. Задержка включения Т0 введена для устранения ложных срабатываний САУ-МП при плавном выходе насоса на рабочий режим. Необходимое давление воды на выходе насосной установки задается при помощи пульта управления преобразователя частоты. Сигнал заданного значения сравнивается с текущим сигналом датчика давления PV2, на основании чего формируется и подается управляющий импульс на двигатель насоса. Если во время работы насосов сигнал на входе 1 становится меньше уставки Р1 на время, большее Т1, то САУ-МП выдает команду «Пауза». Двигатель работающего в это время насоса останавливается. Отмена команды происходит после превышения сигнала уставки Р1 на время, большее Т1. Если во время работы насосов сигнал на входе 2 становится меньше уставки Р2 на время, большее Т2 – что свидетельствует об аварийной ситуации – контроллер САУ-МП выдаёт команду «Отказ», в это время срабатывают реле РП1 или РП2. При изменении положения контактов РП1.4 (РП2.4) преобразователь частоты переводится в режим «Пауза». Контактами РП1.2 (РП2.2) контактор отказавшего насоса отключается, а РП1.1 (РП2.1) сигнализируют таймеру УТ1-PiC о необходимости переключить внутреннее реле R1 в положение, соответствующее запуску резервного насоса. После срабатывания контактора резервного насоса он контактами КМ1.4 (КМ3.4) разрывает цепь включения команды «Пауза» преобразователя частоты, и работа станции продолжается. Контакты реле РП1 (РП2) отказавшего насоса остаются в замкнутом положении до отключения питания прибора. Периодическая смена насосов на станции СУН-АТ реализуется следующим образом. За 1–2 минуты до переключения насосов замыкаются контакты внутреннего реле R2 таймера реального времени УТ1-PiC, и преобразователь частоты переводится в режим «Пауза». Затем переключаются контакты реле R1 и происходит смена насоса, через 1–2 минуты команда «Пауза» отменяется. Вероятность разрыва трубопроводной системы вследствие возникновения гидроудара исключается благодаря плавному изменению частоты вращения двигателя насоса во время его пуска и остановки. Ручной режим является резервным. Он предназначен для обеспечения работоспособности станции на время профилактики или ремонта преобразователя частоты. В этом режиме периодическая смена насосов не производится. Логика работы САУ-МП остается прежней.
Заключение
Входе практических занятий приобрел навыки составления типовой модели АСР. Провел анализ САУ. Выбрал приборы и средства автоматизации. Составить схемы специализированных узлов, блоков, устройств и систем автоматического управления с использованием информационных технологий.
|
из
5.00
|
Обсуждение в статье: Функциональная схема автоматического управления |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы